DEK高级培训资料.pdf - 第86页
CAN bus theory Controller Area Net work CAN Issue 2: July 2007
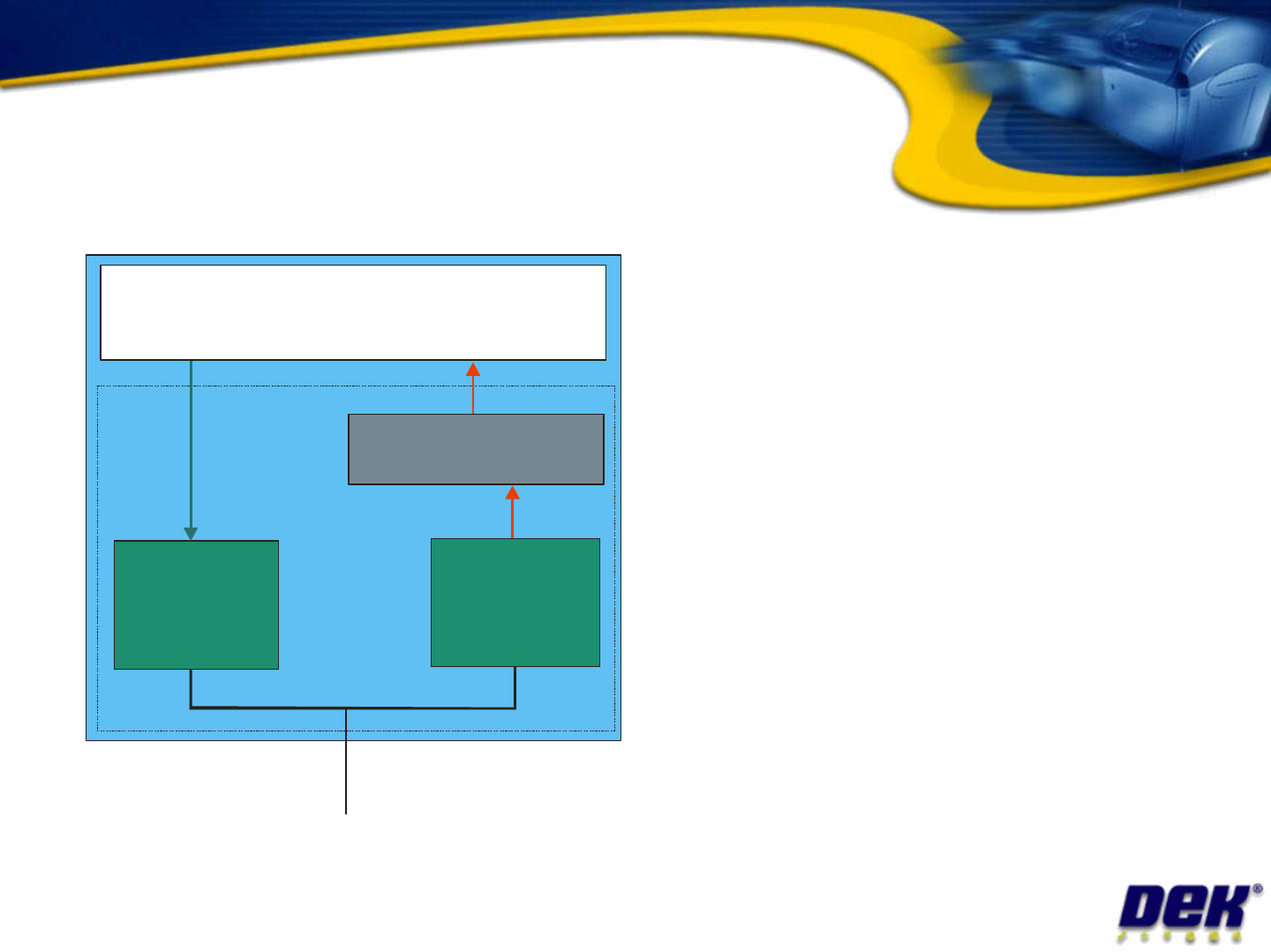
CAN Devices
Application (I/O - drive - sensor)
Message Filter
•
CAN bus
components
:
– I/O Nodes
– Servo Nodes
Issue 2: July 2007
Transmitter
Receiver
CAN Bus
– Servo Nodes
– CAN Transceiver
(on board
Nextmove ES)
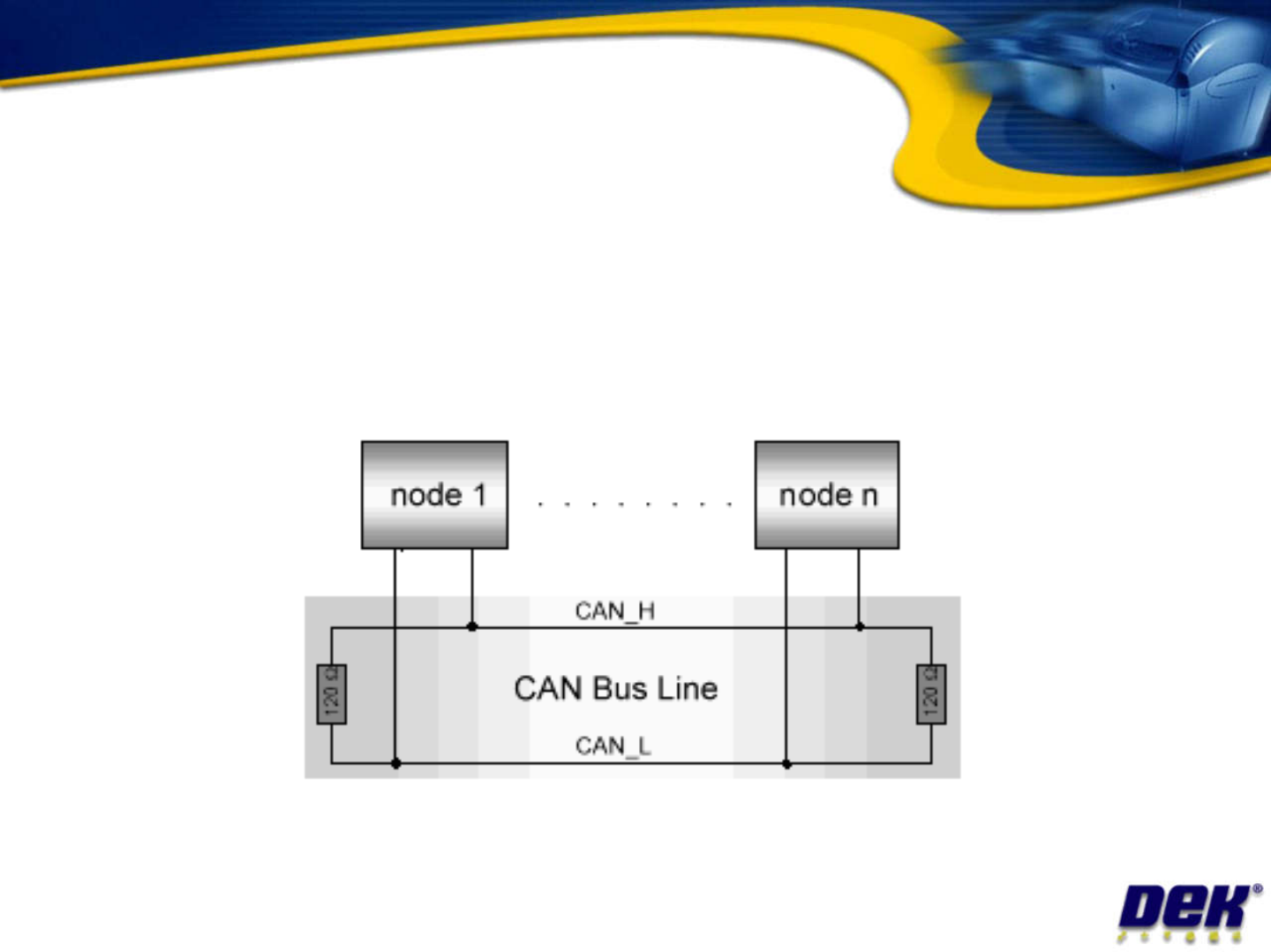
CAN bus theory
Controller Area Network
CAN
Issue 2: July 2007
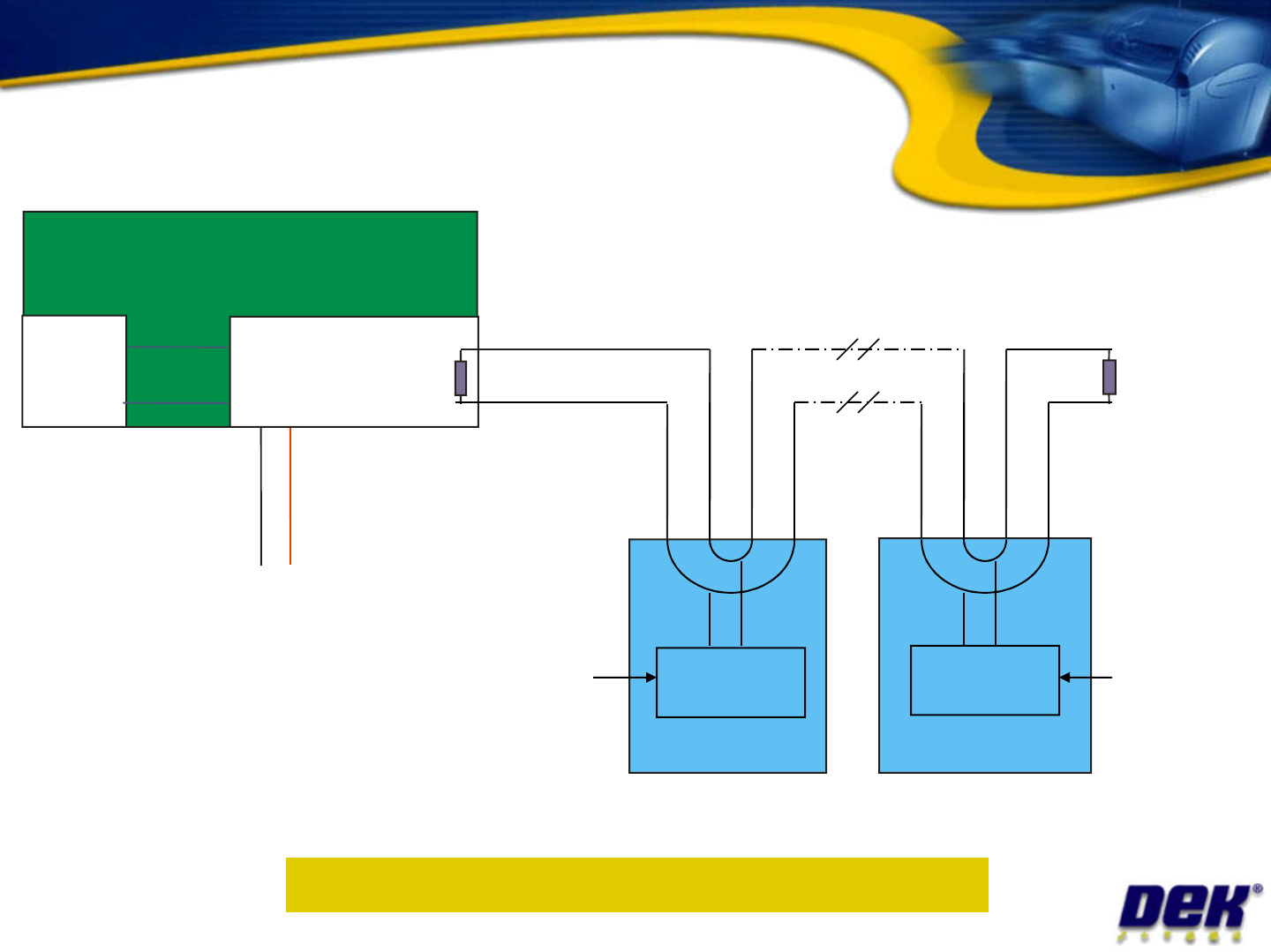
DEK CAN architecture
CAN
Nextmove ES
Tx
Rx
Transceiver
CAN High
CAN Low
120Ω 120Ω
Issue 2: July 2007
0V
+24V
Node
Electronics
For the node to read the bus level correctly it is important that signal reflections
are avoided. This is done by terminating the line with a resistor at both ends of
the bus.
Node
Electronics
+24V
Logic
Supply
+24V
Logic
Supply
From BG9010 (Dunker motor)
Or
Berger Lahr motor assembly
Objective 14: Complete details in workbook