ServiceManual_UR5_zh_3.2.6.pdf - 第11页
保留所有权利 11 Servicemanual_UR5 _en_3.2.6 • 验证机器人的安全设置 符合机器人安装的风险评 估 • 测试其他安全输入和输 出仍在运作: • 检查哪些安全输入和输 出处于激活状态,并测试 可否触发。 2.1.3 目视检验 • 从控制器上断开电源线 • 检查安全控制板上的端 子是否正确插入,且电线 没有松动 • 检查主机板上的所有连 接以及安全控制板与主机 板之间的连接 • 检查控制器内部是否有 污垢 / …
保留所有权利 10 Servicemanual_UR5_en_3.2.6
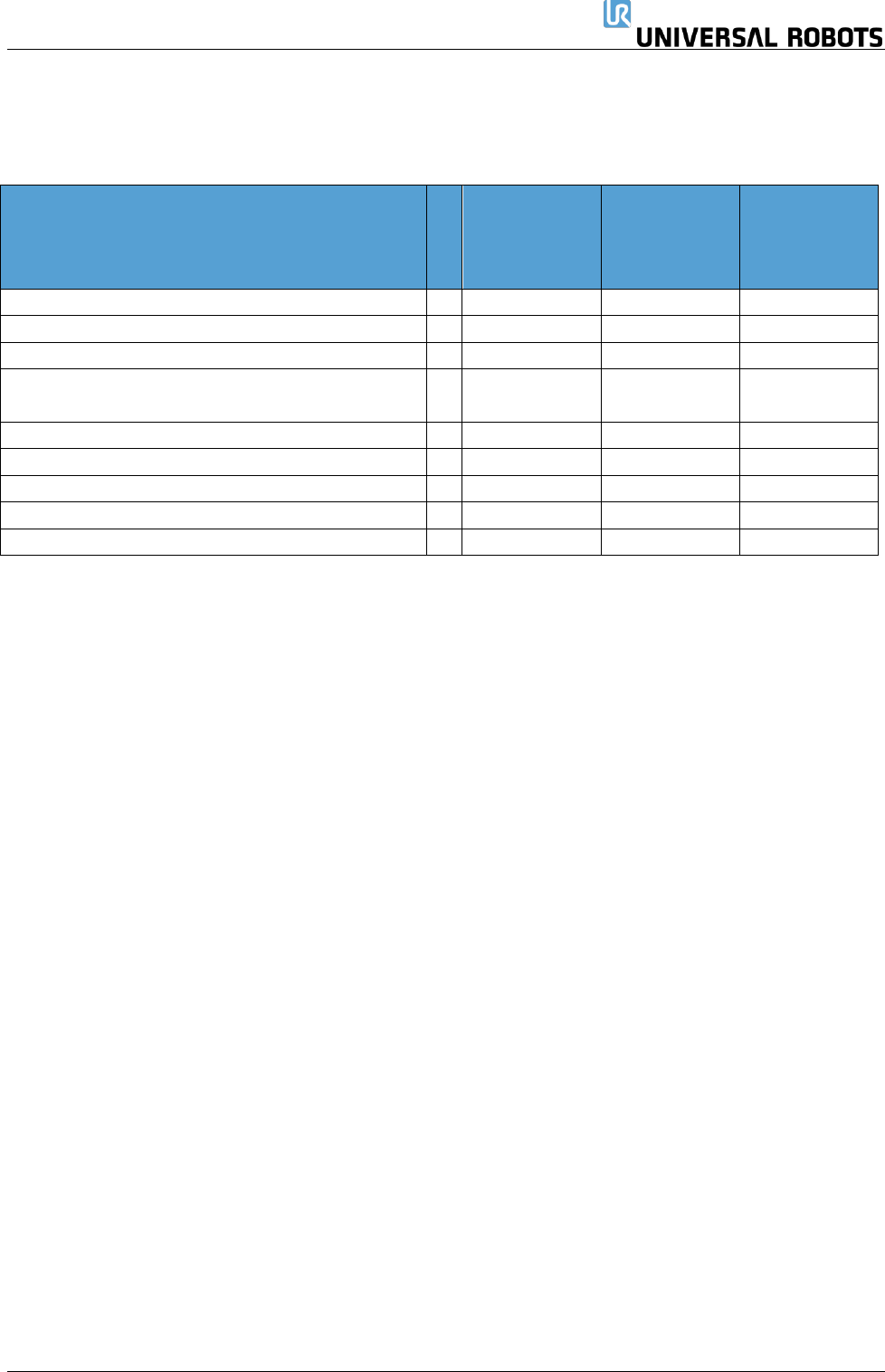
2.1.1 检验计划
下面列出了优傲机器人建议根据标记的时间间隔执行的检查清单。如果检查发现相关零件的状况不
合格,请立即纠正。
请以下列章节作为指导:
2.1.2 安全功能
2.1.3 目视检验
3.2 控制器
每月一次
每半年一次
一年一次
检查示教器上的紧急停止按钮
F
X
检查反向驱动模式
F
X
检查自由驱动模式
F
X
检查安全输入和输出
(如果连接)
F
X
检查示教器电缆
V
X
检查并清洁控制箱上的空气过滤器
V
X
检查控制箱中的端子
F
X
检查控制箱的电气接地 1< Ω
F
X
检查控制箱的主电源
F
X
V = 目视检验 F = 功能检验
2.1.2 安全功能
突出强调机器人安全功能,建议每月进行测试,以确保功能正确。
必须执行以下测试。
• 测试示教器上的紧急停止按钮功能:
• 按下示教器上的紧急停止按钮。
• 观察机器人停止,并关闭关节的电源
• 再次启动机器人
• 测试自由驱动模式:
• 根据工具规格,拆下附属装置或设置工具中心点 (TCP)/有效负载/CoG。
• 按住示教器背面的黑色 Freedrive
(自由驱动)
按钮,将机器人设置为自由驱动模式
• 将机器人移动到水平伸展到其工作空间边缘的位置
• 按住自由驱动按钮的同时,监控机器人在没有支撑的情况下保持其位置。
• 测试反向驱动模式:
如果机器人接近碰撞,在初始化前,可以使用 BACKDRIVE(反向驱动)功能,将机器人移动
到安全位置。
• 按 ON(开启)启用电源,状态将变为“
空闲
”。
• 按住“自由驱动” -> 状态将变为 BACKDRIVE(反向驱动)
• 像自由驱动一样,用手移动机器人。
• 在反向驱动模式下,制动器只有在移动时才会在单个关节上释放,只要按下自由驱动
按钮,制动器就会保持释放状态。与自由驱动模式相比,机器人移动起来有些“笨重”。
• 请单独测试每个关节,以确保制动器按预期释放。
• 验证安全设置:
保留所有权利 11 Servicemanual_UR5_en_3.2.6
• 验证机器人的安全设置符合机器人安装的风险评估
• 测试其他安全输入和输出仍在运作:
• 检查哪些安全输入和输出处于激活状态,并测试可否触发。
2.1.3 目视检验
• 从控制器上断开电源线
• 检查安全控制板上的端子是否正确插入,且电线没有松动
• 检查主机板上的所有连接以及安全控制板与主机板之间的连接
• 检查控制器内部是否有污垢/灰尘,视需要,使用防止静电放电的真空吸尘器清洁
注意:
切勿使用压缩空气清洁控制器内部,否则,可能损坏组件
保留所有权利 12 Servicemanual_UR5_en_3.2.6
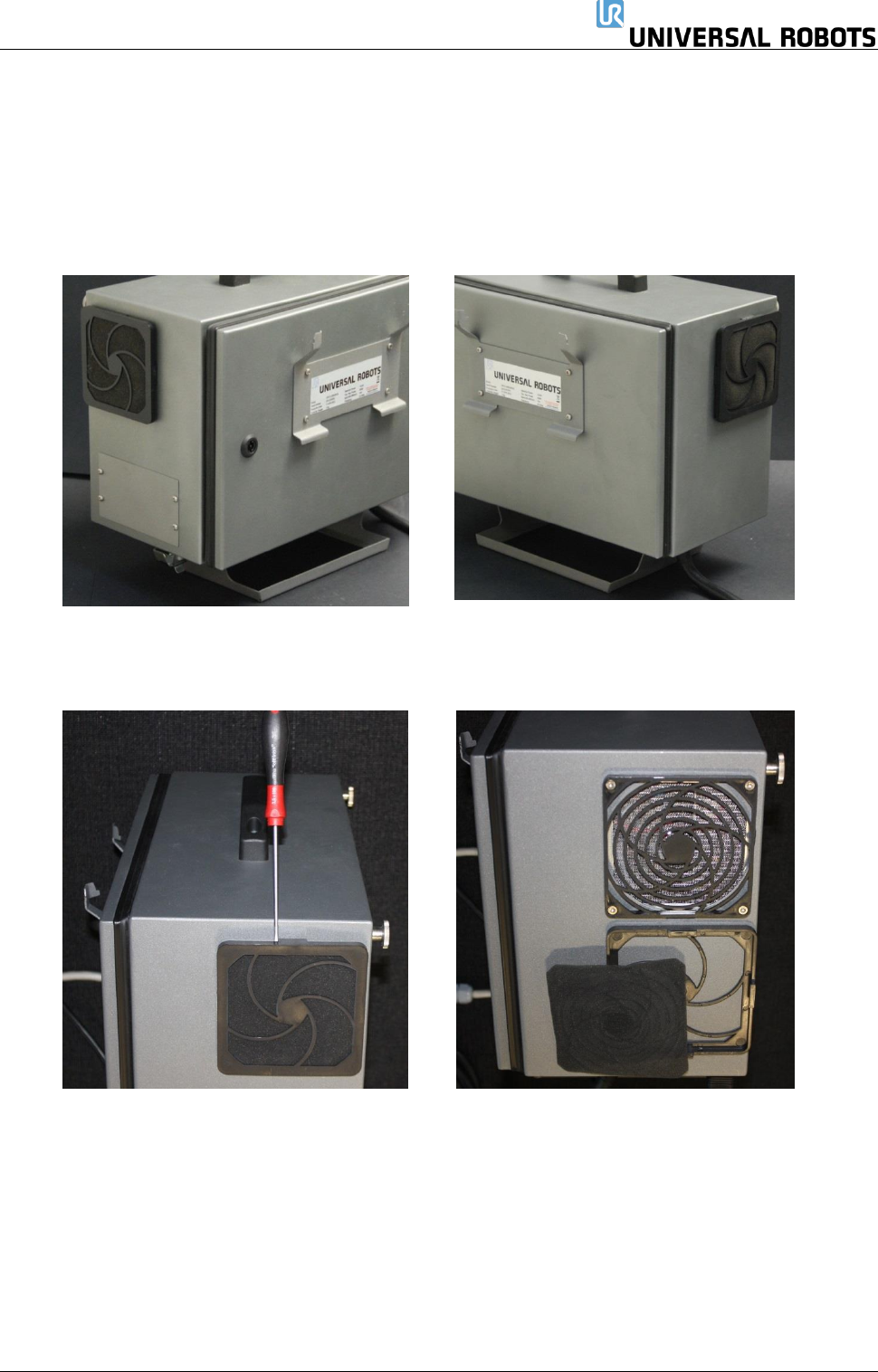
2.1.4 清洁和更换过滤器
2.1.4.1 原装控制箱
• 控制箱有两个过滤器,每侧各安装一个
• 从控制箱中取出过滤器,并用低压空气彻底清洁
o 视需要,更换过滤器
o 轻轻地拆下外部塑料框架,并维护过滤器