ServiceManual_UR5_zh_3.2.6.pdf - 第145页
保留所有权利 145 Servicemanual_UR5 _en_3.2.6 5.3.5 碰撞后的检查 表 碰撞后的检查表 拆下盖子,并检查关节 内 部的零件 目视检查机械臂。 是否有任何外观受损的 零件,例如,蓝色盖 子? 在进入工作单元之前, 停止机器人程序,并按 下紧急停止按钮 按下示教器背后的自由 驱动按钮,检查所有关 节的自由驱动功能 > 是否观察出任 何异常的摩 擦或行为? 检查有行为异常的关节 检查日志历史记录中的 …
保留所有权利 144 Servicemanual_UR5_en_3.2.6
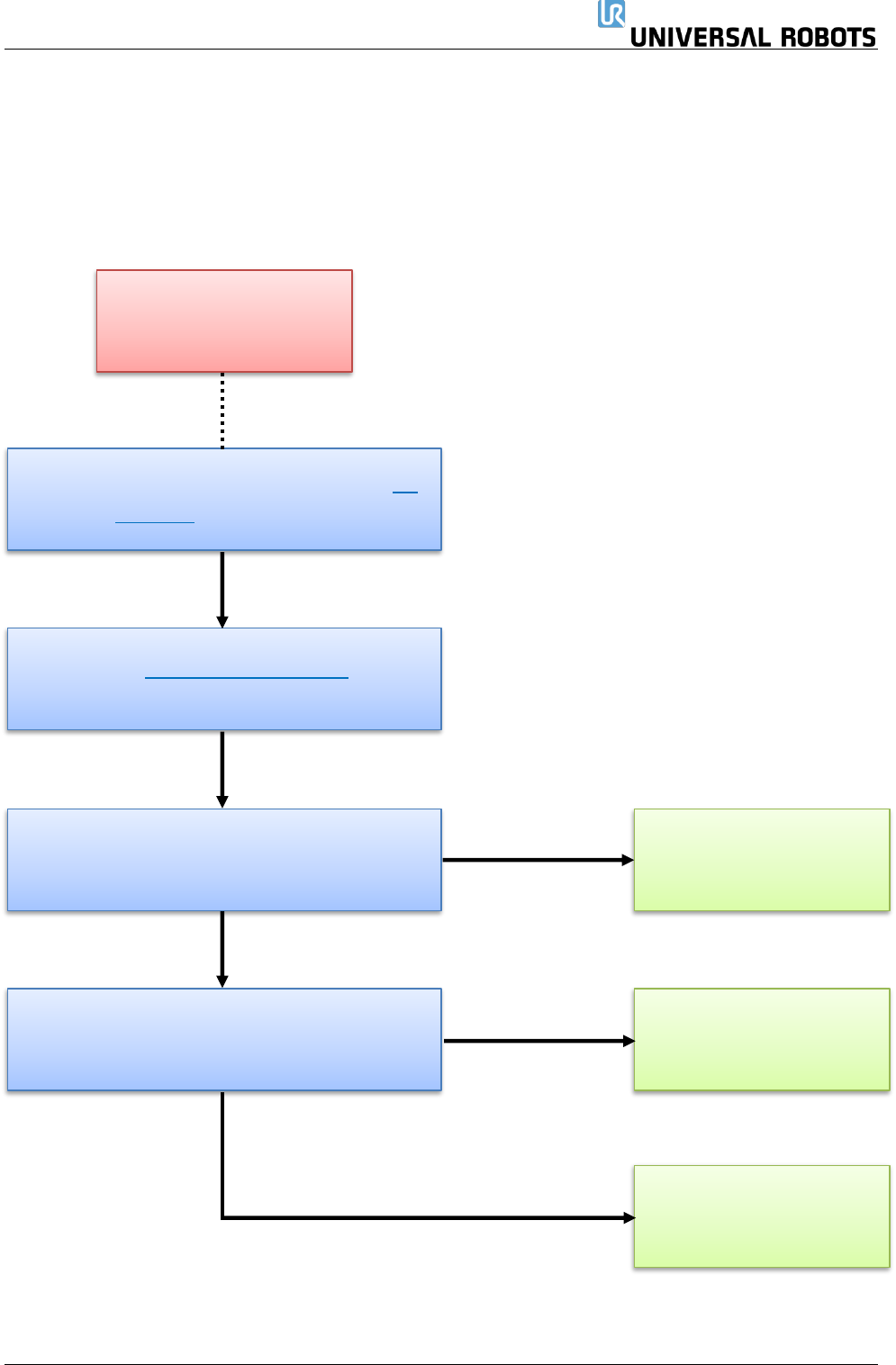
5.3.4 初始化时通电失败
在 Initializing(初始化)窗口中,机器人电源接通数秒后关闭,这种现象可能有许多原因。
很可能是控制箱故障或与关节或工具的通信出现故障。
控制箱故障
更换 48V 电源
通电期间(通电的前三秒内),测量分电盘
PCB 上的 48V_PSU1 连接器是否存在 230V 交流
电
进行 5.3.7 完整的重启操作。
测量分电盘上的红色连接器/扁平电缆中是否存
在 12V DC
更换分电盘
检查日志历史记录中的错误消息,并参考 5.1
错误代码,了解详细说明
更换安全控制板
是
是
否
否
保留所有权利 145 Servicemanual_UR5_en_3.2.6
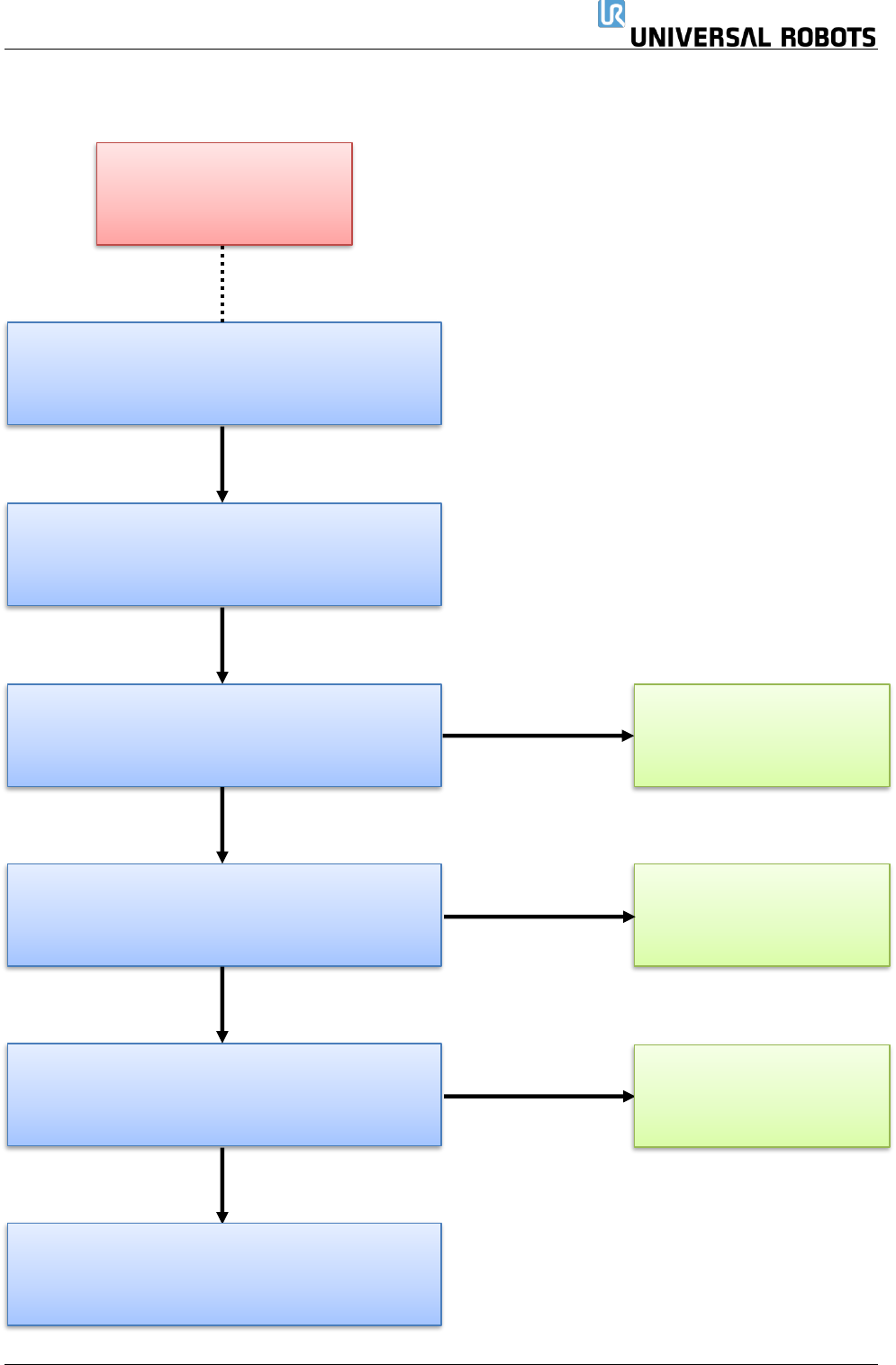
5.3.5 碰撞后的检查表
碰撞后的检查表
拆下盖子,并检查关节内
部的零件
目视检查机械臂。
是否有任何外观受损的零件,例如,蓝色盖
子?
在进入工作单元之前,停止机器人程序,并按
下紧急停止按钮
按下示教器背后的自由驱动按钮,检查所有关
节的自由驱动功能 > 是否观察出任何异常的摩
擦或行为?
检查有行为异常的关节
检查日志历史记录中的错误消息,并参考“错误
代码”章节,了解详细说明
是
是
否
否
按下示教器背后的自由驱动按钮,检查所有关
节的自由驱动功能 > 是否观察出任何过大的噪
声?
是
否
检查关节有无异常噪声。
如果出现咔嗒声,检查制
动器销
低速启动机器人程序,并验证机器人是否按预
期运行
否
保留所有权利 146 Servicemanual_UR5_en_3.2.6
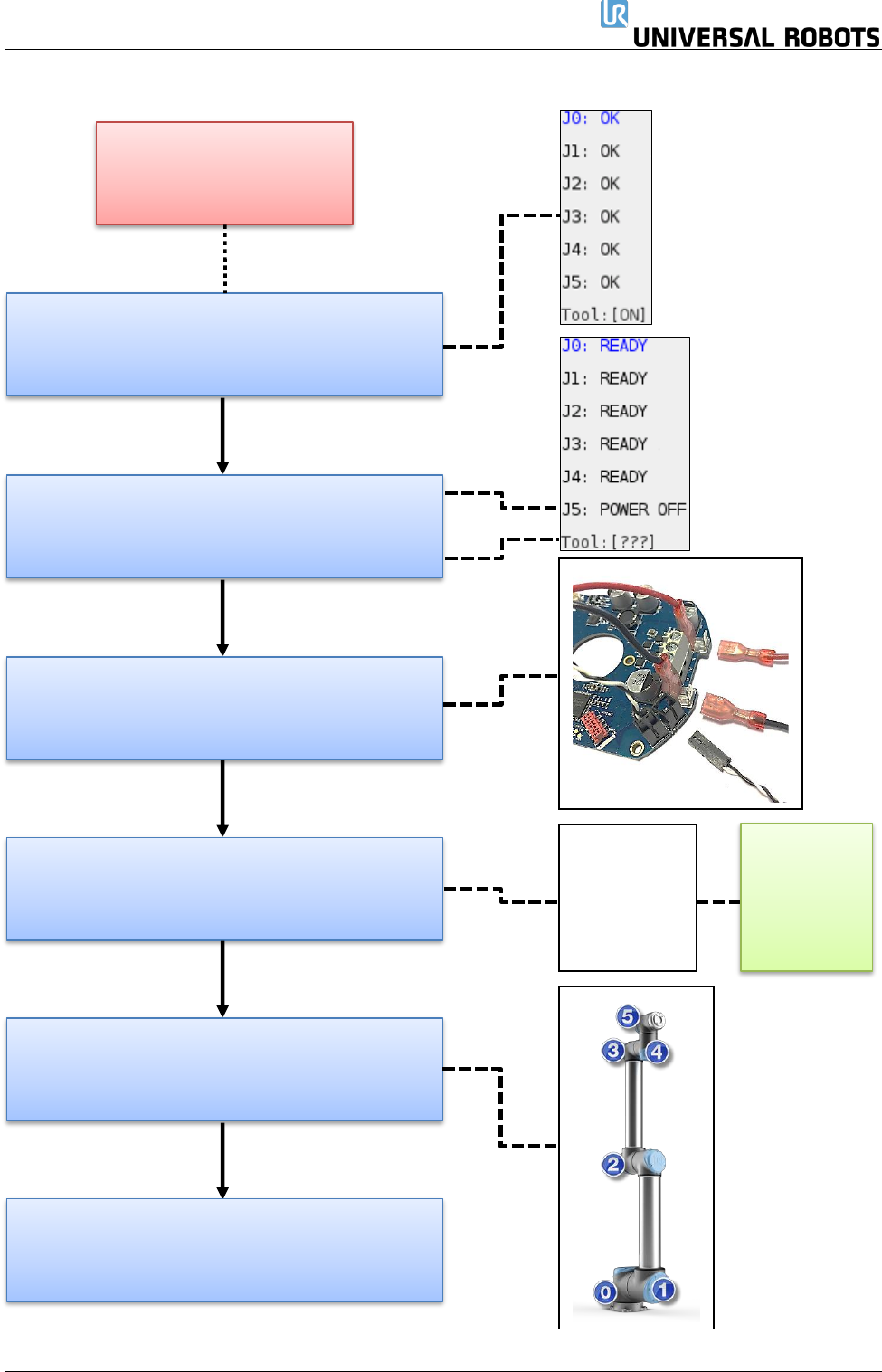
5.3.6 与关节和工具的通信
检查是否与关节和工具通
信
如果存在通信问题,
检查关节上有通信问题的连接端子和电线以及
之前的关节。
没有与关节的通信将显示“关机”
与工具没有通信将显示 [???]
拆除除底座关节 (J0) 以外的所有电源和通信连
接。
检查是否连接此关节。
转到专家模式,并启动机械臂。检查所有关节/
工具是否均通信
否
通过连接下一个关节继续,并检查是否也在通
信。
如果上述步骤都不能解决问题,请联系您的优
傲机器人代表。
检查控制箱
的电缆与控
制箱的连
接。
与底座关节
(J0) 没有通
信