ServiceManual_UR5_zh_3.2.6.pdf - 第170页
保留所有权利 170 Servicemanual_UR5 _en_3.2.6 7. 机器人打包 包装机器人和控制箱准 备发货 注意: • 发货前,请拆下任何外 部工具和外部电气连接。 • 如果第三方产品无法安 全卸载,或者他们禁止执行 所需的维修后 测试,优傲机器人可以 拒绝发货。 • 优傲机器人对第 3 方货物的退货不承担任 何责任。 • 请确保负责任地包装机 器人、控制箱和示教器。 • 优傲机器人将始终以原 优傲机器人包装运回优傲机…
保留所有权利 169 Servicemanual_UR5_en_3.2.6
122430
CB3.0 至 CB3.1 主机板升级套件
*
*
171030
171030
RAM 模块 CB2.0 和 CB3.0
*
*
171031
RAM 模块 CB2.1 和 CB3.1
*
171022
171022
小型闪存卡 CB2 和 CB3
*
*
122421
122421
机器人小型闪存卡,包括软件和序列号 CB2 和 CB3
*
*
177002
177002
电源装置 12V
*
177003
177003
电源装置 48V
*
122431
122431
机器人 USB,包括软件和序列号 CB2.1 和 CB3.1
*
172080
172080
分电盘 PCB
*
172290
安全控制板
*
107000
安全控制板端子套件(12 个端子和跳线)
*
122745
122745
耗能装置,包括风扇
*
177503
177503
控制器的过滤器套件(包括两个过滤器)
*
139033
139033
用于安装示教器的支架
*
132407
132407
用于安置控制器的支架
*
164231
164231
底座至控制器电缆 UR10
*
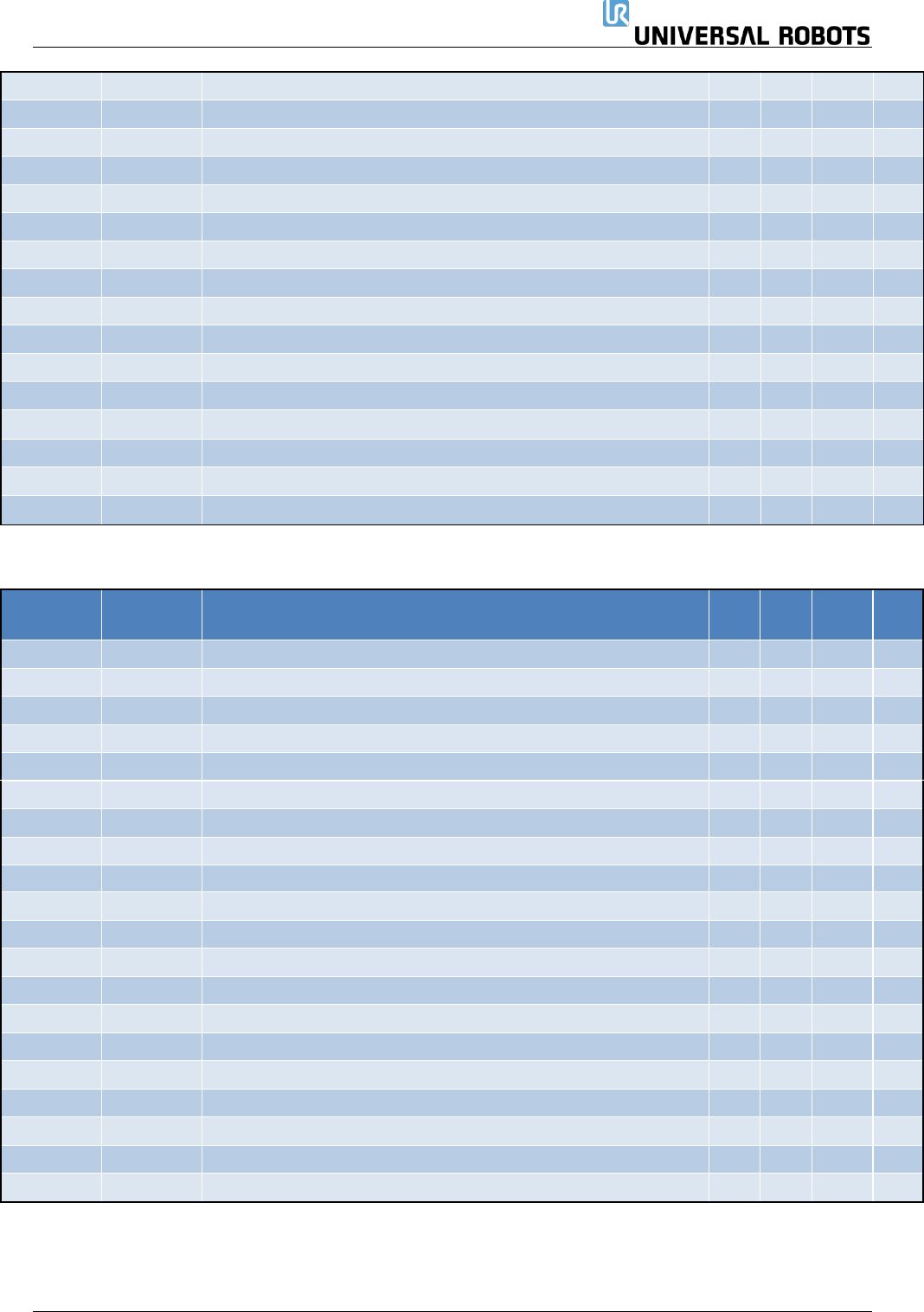
工具
CB3 零件
号码
CB2 零件
号码
产品名称
UR3
UR5
UR10
全
部
109010
109010
工具套件 UR3/5/10(套件包括以下标有*的所有工具)
*
109101
109101
* 5.5mm 六角扳手
*
109102
109102
* 7.0mm 六角扳手
*
109110
109110
* 10.0mm 六角扳手
*
109103
109103
* 梅花头 T10 螺丝刀
*
109104
109104
*梅花头 T8 + T10 扭矩螺丝刀
*
109111
*梅花头 T10 扭矩螺丝刀
*
109112
*梅花头 T20 扭矩螺丝刀
*
109105
109105
* 5.5mm 1 号和 2 号六角扭矩扳手
109106
109106
*7.0mm 3 号六角扭矩扳手
*
109107
109107
*10.0mm 4 号六角扭矩扳手
*
109180
109180
* 防静电腕带
*
164084
164084
* 旁通电缆(用于设置关节标识码)
*
185500
双校准工具
*
131501
131501
用于安装机械臂 UR5 的支架(项目型材)
*
131502
131502
用于安装机械臂 UR5 的支架(BOSCH 型材)
*
131503
用于安装机械臂 UR3 的支架(项目和 BOSCH 型材)
*
131510
131510
用于安装机械臂 UR10 的支架(项目和 BOSCH 型材)
*
131099
用于工具连接器保护帽的铝盖
*
173100
173100
带角度连接器的外部工具电缆
*

保留所有权利 170 Servicemanual_UR5_en_3.2.6
7.机器人打包
包装机器人和控制箱准备发货
注意:
• 发货前,请拆下任何外部工具和外部电气连接。
• 如果第三方产品无法安全卸载,或者他们禁止执行所需的维修后
测试,优傲机器人可以拒绝发货。
• 优傲机器人对第 3 方货物的退货不承担任何责任。
• 请确保负责任地包装机器人、控制箱和示教器。
• 优傲机器人将始终以原优傲机器人包装运回优傲机器人产品。
• 在 www.universal-robots.com/support/下载有关机器人类型和包装材料的正确装箱程序。
• 将程序上传至机器人。有关具体做法,请参见 4.3 使用魔法(Magic)文件。
• 下载该程序,并按照说明运行该程序。
注意:如果机器人不能运行或电源不可用,可以单独手动释放每个关节的制动器,并相应地
包装机器人。有关释放制动器,请参见 3.1.3 释放制动器
• 关机,断开电源和机械臂与控制器的连接。
• 将机械臂和控制箱装入指定的箱子中。确保机械臂在箱子中方位正确。
保留所有权利 171 Servicemanual_UR5_en_3.2.6
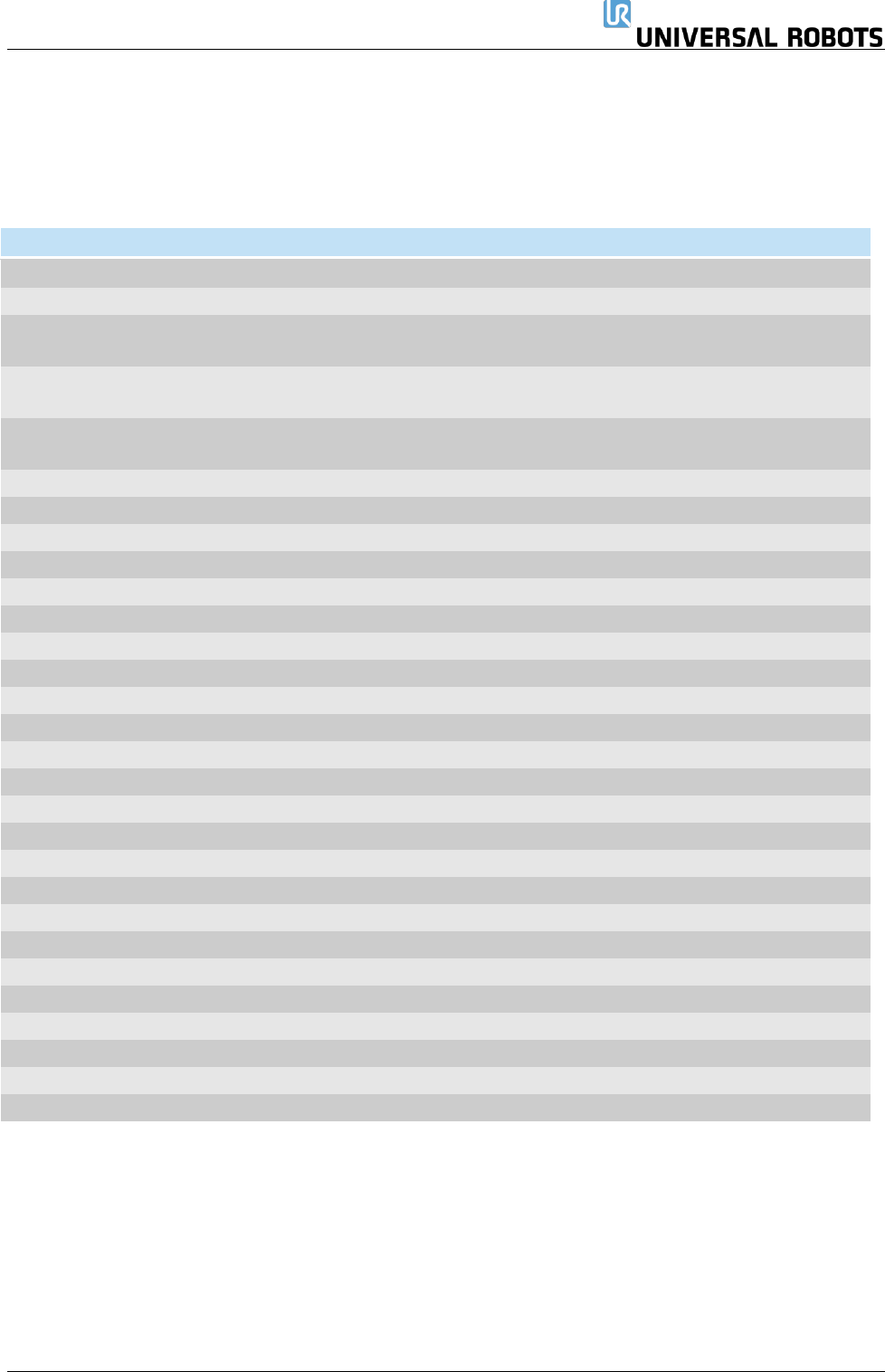
8.变更日志
日期
版本
操作
变更之处
3.2014 年 5 月
UR5_en_3.0
增加新内容
发布 3.0 版
19.2014 年 6 月
UR5_en_3.0.1
变更
变更图片和插图,匹配第 3 代机器人
29.2014 年 7 月
UR5_en_3.0.2
变更
变更错误代码和备件,匹配第 3 代机器人,并增
加防静电处理
20.2014 年 10 月
UR5_en_3.1.1
变更
电气文档、E-plan,备件升级和更新错误代码。新
结构拆卸/组装指南。修改防静电处理。
2016 年 1 月
UR5_en_3.1.2
变更
更新电气图纸、关节备件调整,错误代码。双机
械臂校准。添加主机板 3.1
2016 年 10 月
UR5_en_3.2.0
增加新内容
3.1.19 线束安装指南
2016 年 12 月
增加新内容
3.1.4 关节螺栓长度
增加新内容
错误代码 C71A12
增加新内容
3.1.5 增加 3 号扭矩公差
更正
5.2 LED 启动序列
增加新内容
3.2.4 主机板 3.1 升级说明
增加新内容
4.4 数据备份
更正
各种拼写、单词,设置
2017 年 2 月
变更
7.打包机器人
增加新内容
1.4 警告标志
增加新内容
C50A5 和 C50A6 公差说明
2017 年 10 月
增加新内容
故障排除 5.3.6
增加新内容
错误代码 C103A3
更正
错误代码 C20A1 说明
增加新内容
更换 48V 电源时的步骤
2018 年 1 月
增加新内容
故障排除 5.3.7
更正
“如何修复”文本纠正了许多错误代码
2018 年 9 月
UR5_en_3.2.1
增加新内容
第 2 章检验计划
2019 年 5 月
UR5_en_3.2.2
更新
第 2 章检验计划
更新
1.4 警告标志
2019 年 8 月
UR5_en_3.2.3
增加新内容
第 3.1.4 节的更多指导
2019 年 8 月
UR5_en_3.2.4
增加新内容
合并控制箱详情
9 月 2019
UR5_en_3.2.5
增加新内容
5.3.3 保护性停止一节中的更多信息
2019 年 10 月
UR5_en_3.2.6
变更
第 2 节中的标题和用语