ServiceManual_UR5_zh_3.2.6.pdf - 第25页
保留所有权利 25 Servicemanual_UR5 _en_3.2.6 组装: 更换关节后,按照以下 步骤组装机械臂。 1. 将螺钉和垫圈轻轻插入 关节外壳的十个螺纹孔中 的每一个(关节很 可能已经插入了这些孔) 。 小心: 将正确的螺钉放在正确的孔中至关重要。蓝色标记的螺钉比其余的 短。 小心: 组装前,对准丝锥应当 对准。如果丝锥彼此相对 (偏移 180 度),关节 无法正确合并,且随着 时间的推移,关节自身有 松动的风险。 2…
保留所有权利 24 Servicemanual_UR5_en_3.2.6
7. 断开电线。
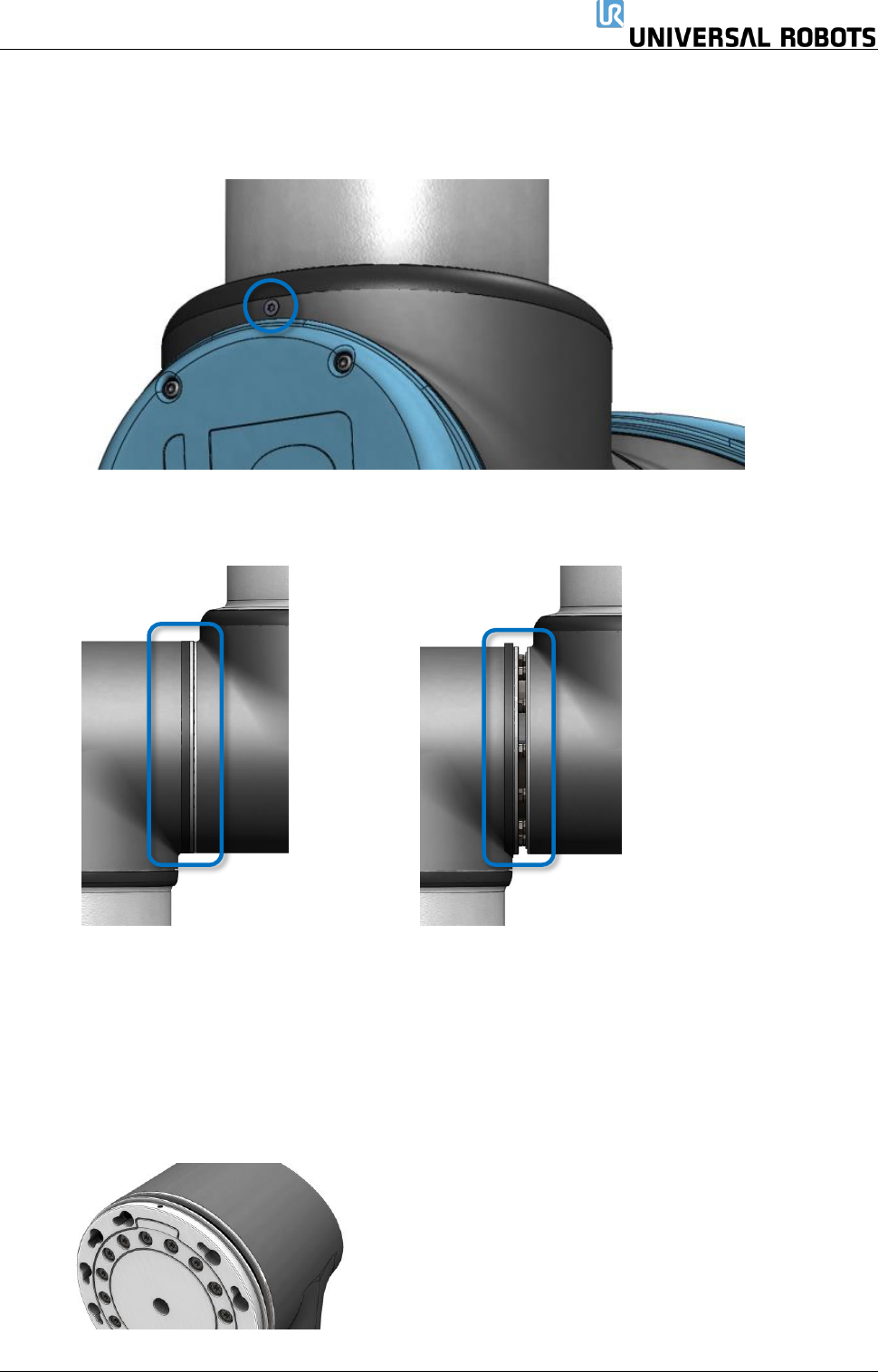
8. 拆下定位螺钉(较新的关节外壳上没有)。
9. 使用小平头螺丝刀或类似工具,轻轻取下黑色柔性扁型环,并将其从关节外壳上原来的位置向后
拉动。
10. 将灰色的特氟隆环向后滑动。
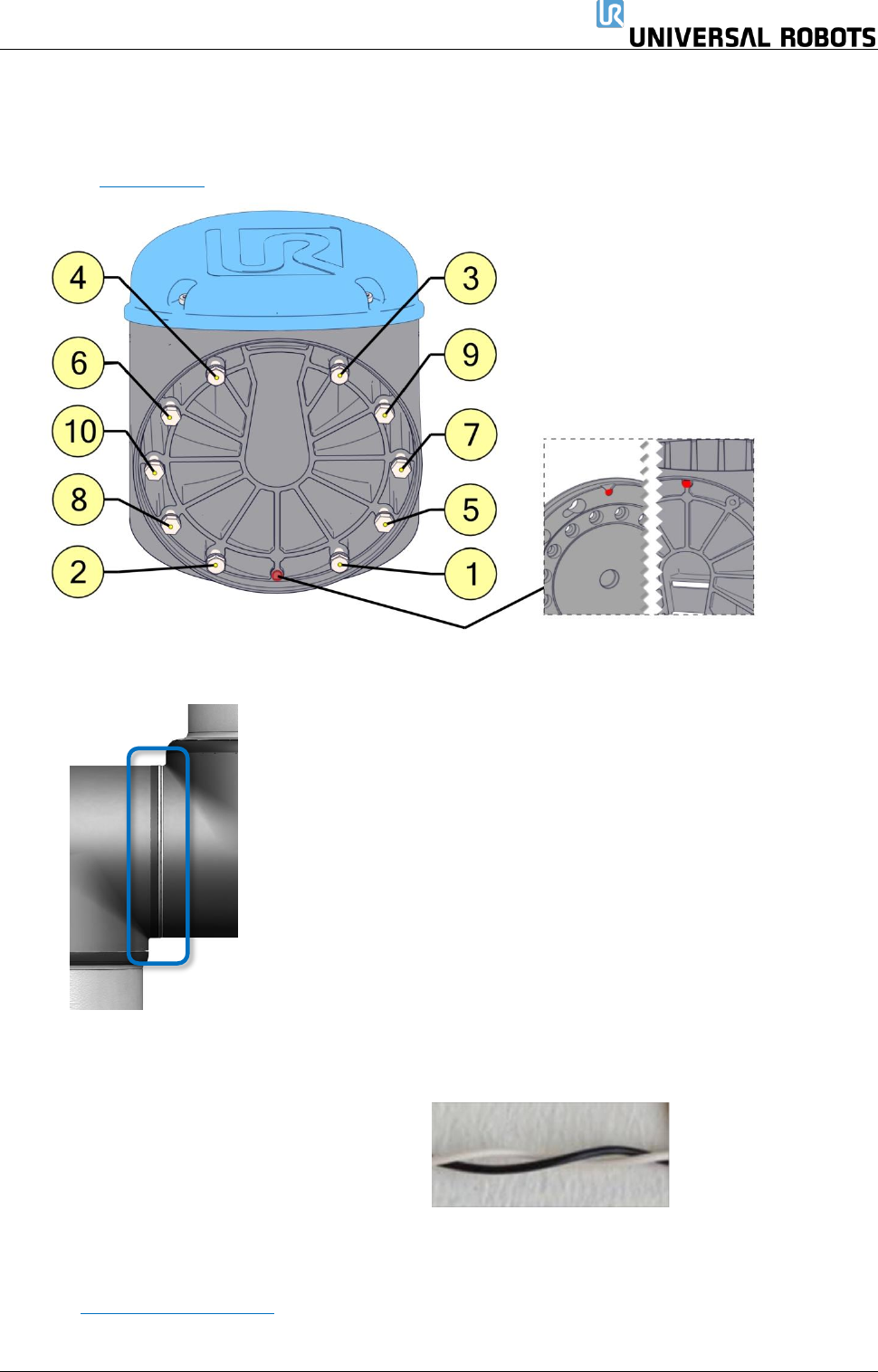
10 个螺钉可见,关节两侧各 5 个。
使用开口扳手松开螺钉,每个大约两整圈。
11. 将两个零件拉开,逆时针轻轻扭转约 5 度,直到达到机械止动(孔为钥匙孔型)。之后,它们可
以完全分离。
保留所有权利 25 Servicemanual_UR5_en_3.2.6
组装:
更换关节后,按照以下步骤组装机械臂。
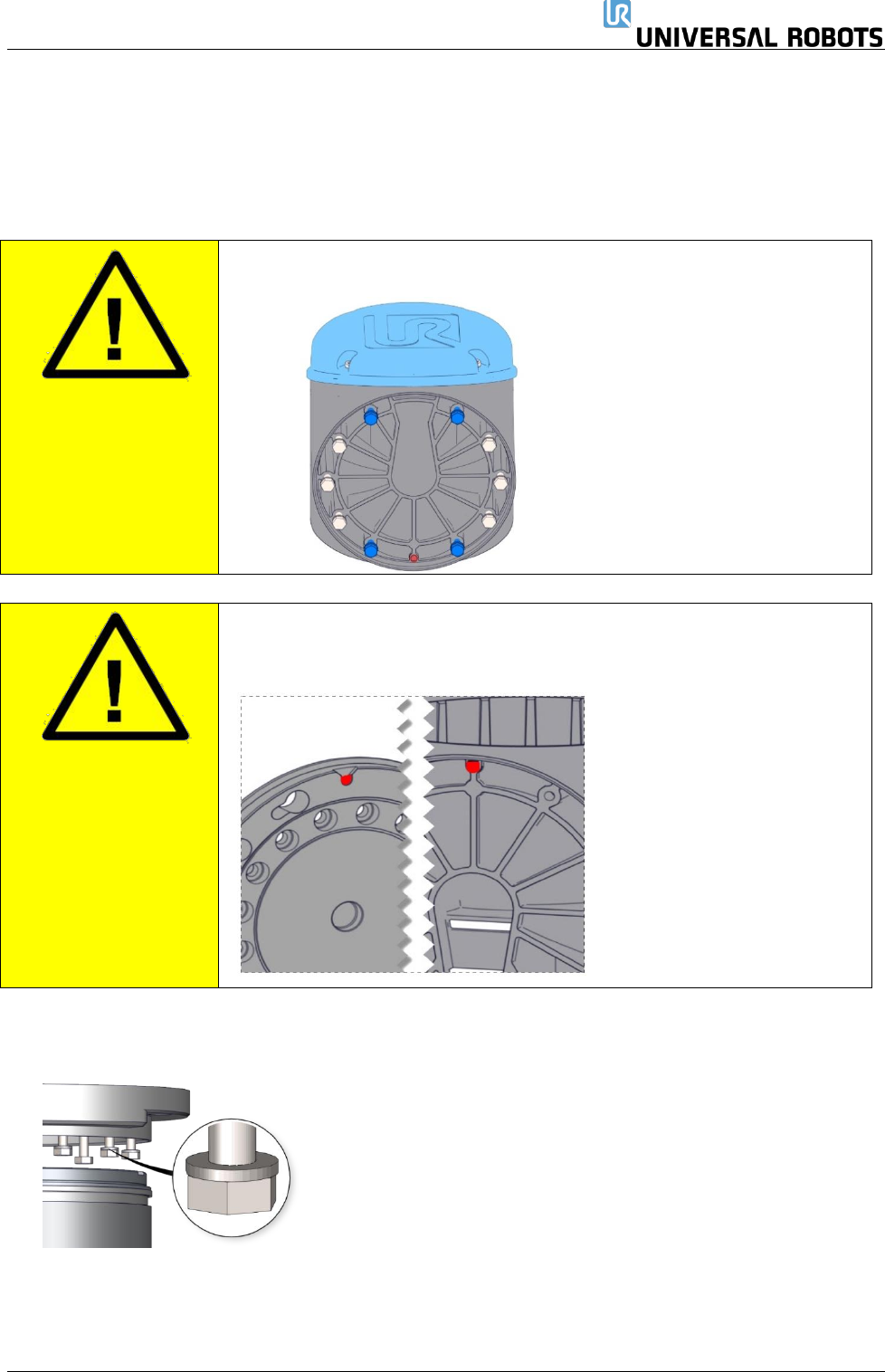
1. 将螺钉和垫圈轻轻插入关节外壳的十个螺纹孔中的每一个(关节很可能已经插入了这些孔)。
小心:
将正确的螺钉放在正确的孔中至关重要。蓝色标记的螺钉比其余的
短。
小心:
组装前,对准丝锥应当对准。如果丝锥彼此相对(偏移 180 度),关节
无法正确合并,且随着时间的推移,关节自身有松动的风险。
2. 确保所有垫圈均与螺栓头齐平(这至关重要),然后,顺时针轻轻扭转零件大约 5 度,直至到达
机械止动位置。