ServiceManual_UR5_zh_3.2.6.pdf - 第52页
保留所有权利 52 Servicemanual_UR5 _en_3.2.6 5. 选择 Joint ID (关节标识 ) 选项卡 6. 选择 J5 (需要更改的 标识码) 7. 取消勾选 “Exchang e IDs” (更改标 识)方框 8. 在下拉方框中,选择标 识码 3 9. 按下 Set it (设置) 10. 确认 Change ID (修改标 识) 11. 当机器人再次通 电时, J5 将显示为 J3 。
保留所有权利 51 Servicemanual_UR5_en_3.2.6
3.1.17 更改关节标识
每个关节都有一个唯一的标识码。在机器人上,如果有两个具有相同标识码的关节,将导致出现通
信问题,机器人将无法操作。
ID
关节
J0
底座
J1
肩部
J2
肘部
J3
手腕 1
J4
手腕 2
J5
手腕 3
示例:
必须更换手腕 1 (J3)。备用关节是手腕 3 (J5)
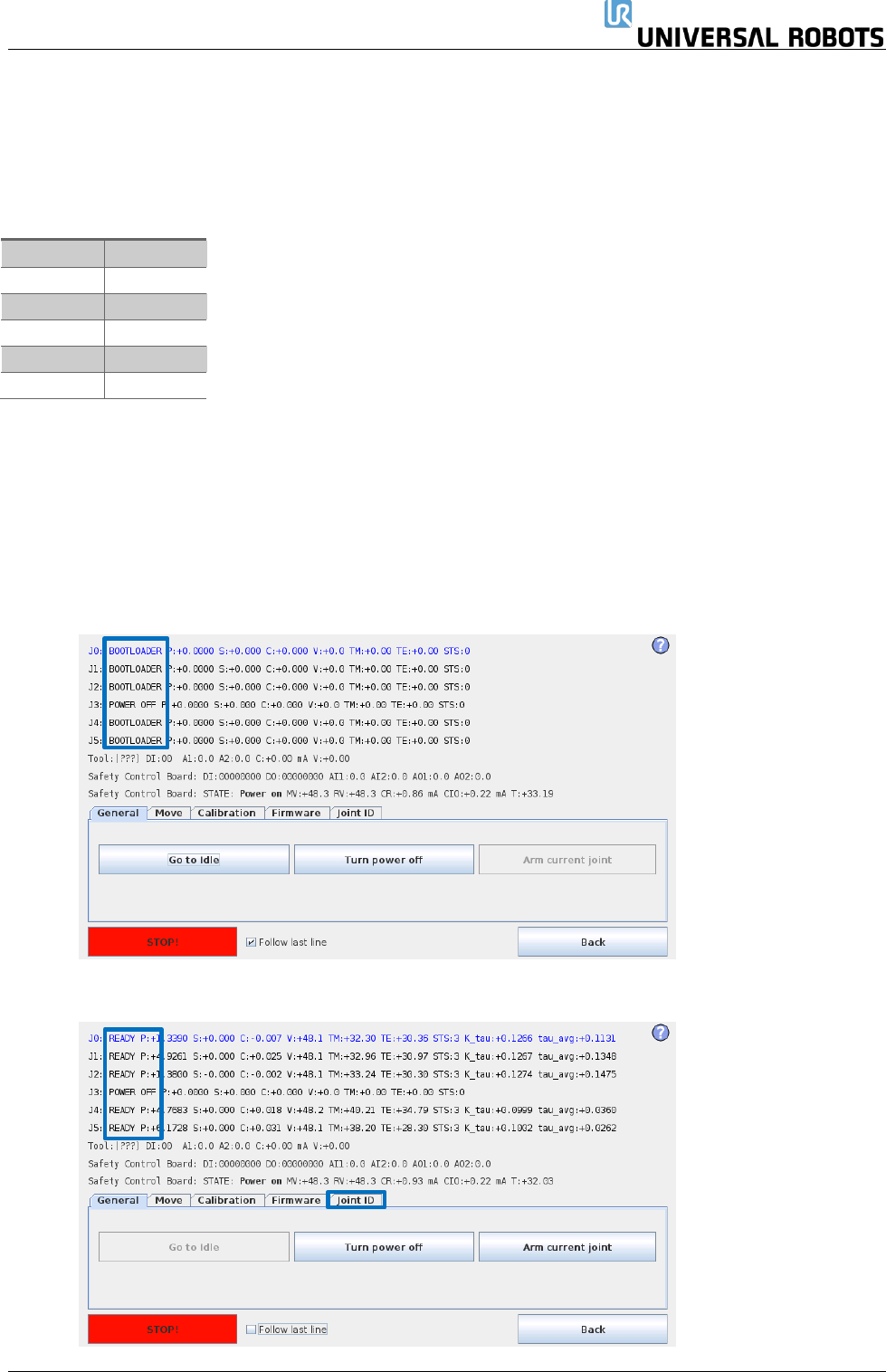
1. 断开具有相同标识码的关节。
2. 进入低级控制
3. 按 Turn power on
(接通
电源),连接的关节进入引导加载器模式
4. 按下 Go to Idle
(
转到空闲
)
,连接的关节进入 READY(准备)模式
保留所有权利 52 Servicemanual_UR5_en_3.2.6
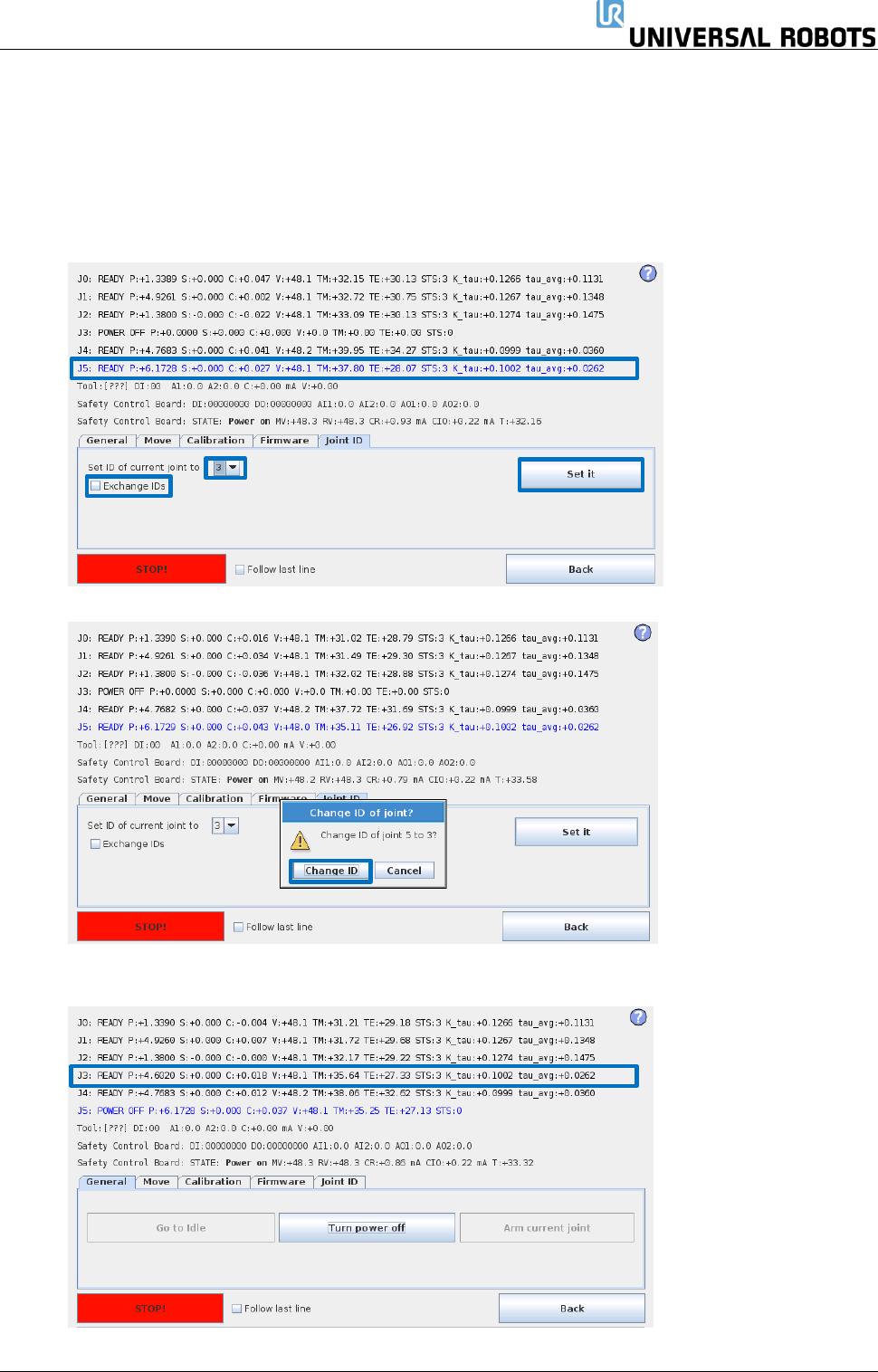
5. 选择 Joint ID
(关节标识)
选项卡
6. 选择 J5
(需要更改的标识码)
7. 取消勾选 “Exchange IDs”(更改标识)方框
8. 在下拉方框中,选择标识码 3
9. 按下 Set it (设置)
10. 确认 Change ID
(修改标识)
11. 当机器人再次通电时,J5 将显示为 J3。
保留所有权利 53 Servicemanual_UR5_en_3.2.6
+ 手腕 1 或 2 的线束
套件
3.1.18 关节备件调整
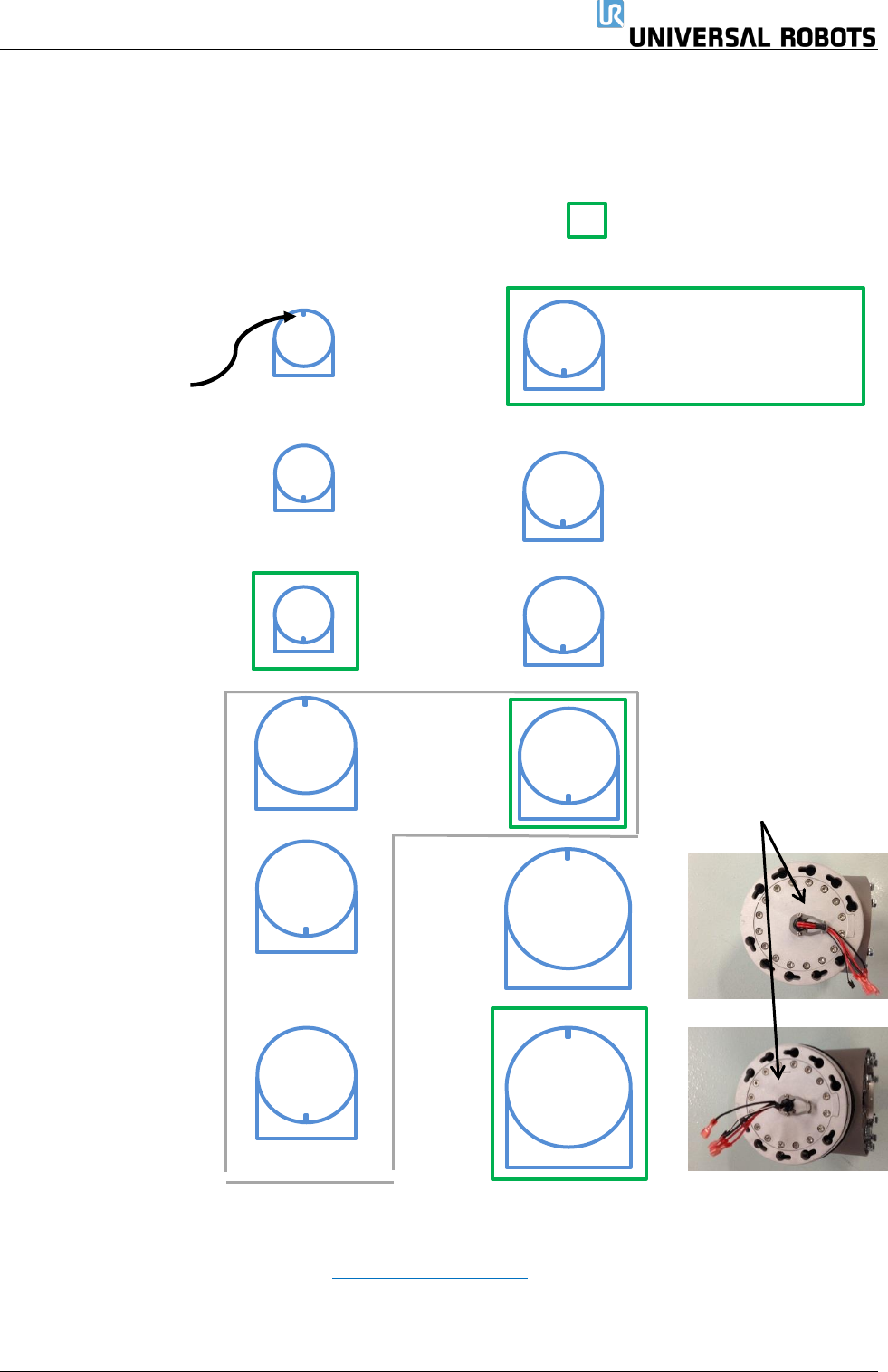
UR5 和 UR10 由四种不同的关节尺寸组成,其中一些可在不同位置/机器人之间互换:
UR5 和 UR10 的推荐备用关节标注有:
机器人: UR5 UR10
手腕 3:ID =5 尺寸 1* 尺寸 2
对准螺钉
手腕 2:ID =4 尺寸 1 尺寸 2
手腕 1:ID =3 尺寸 1 尺寸 2
肘部: ID =2 尺寸 3* 尺寸 3
支架下方/上方的电线
肩部:ID =1 尺寸 3 尺寸 4
底座:ID =0 尺寸 3* 尺寸 4
* 在不同位置使用关节时,例如,UR5 底座作为 UR5 肘部时,在机械装配机器人之前,可能需要改变
标识码,电气连接所有关节,并使用“上移/下移”功能,在低位平控制下将关节旋转 180 度。之后,
机器人需要零位调整或双机械臂校准- 3.1.15 校准关节的说明