2020年协作机器人行业发展蓝皮书 - 第63页
2020 年协作机器人产业发 展蓝皮书 62 第八章 协作机器人典型行业应用案例 第一节 汽车及相关行业 协作机器人因具 有体积小 巧、安全性高、 柔性灵活等特性 ,所以得到汽 车 相关企 业的 广泛关注。在汽 车生产线 中引入协作机器 人,可实现更智 能的生产方式 。协作机器人主 要 应用在汽车锁螺 丝、检测 、上下料、打磨 、装配等工艺 环节 。 锁 螺丝 质 量检测 搬运 上下料 打磨 涂胶 案例 1 某 知 名 汽 车 配 件 …

2020 年协作机器人产业发展蓝皮书
61
眼见为实
捌
眼
眼
眼
眼
眼
眼
眼
眼
眼
眼
眼
捌

2020 年协作机器人产业发展蓝皮书
62
第八章 协作机器人典型行业应用案例
第一节 汽车及相关行业
协作机器人因具有体积小巧、安全性高、柔性灵活等特性,所以得到汽车相关企业的
广泛关注。在汽车生产线中引入协作机器人,可实现更智能的生产方式。协作机器人主要
应用在汽车锁螺丝、检测、上下料、打磨、装配等工艺环节。
锁
螺丝
质
量检测
搬运 上下料
打磨 涂胶
案例 1 某知名汽车配件公司
企业需求 在狭小空间内实现物料搬运
面临挑战
1、搬运的物料为汽车后备箱储物帘把手板,尺寸较大;
2、搬运物料的空间有限,无法放入传统的工业机器人;
3、搬运节拍要求较高,对机器人速度、稳定性有规定。
解决方案
利用两台 JAKA Zu 7 对物料进行搬运操作,提高生产效率。具体方案如下:
1、 将两台 Zu 7 机器人以双工位的方式融入现有产线,无缝连接现有设备;
2、 合理安装两台机器人的工作位置,实现交替对产品进行上料、下料、翻面;
3、 采用机器人运动规划算法,通过优化搬运节拍,实现快速搬运。
料
上
2020 年协作机器人产业发展蓝皮书
63
项目成效
1、双工位方式配置机器人,减少物料转运环节,优化搬运时间和工序配置;
2、代替人工,提高自动化水平。
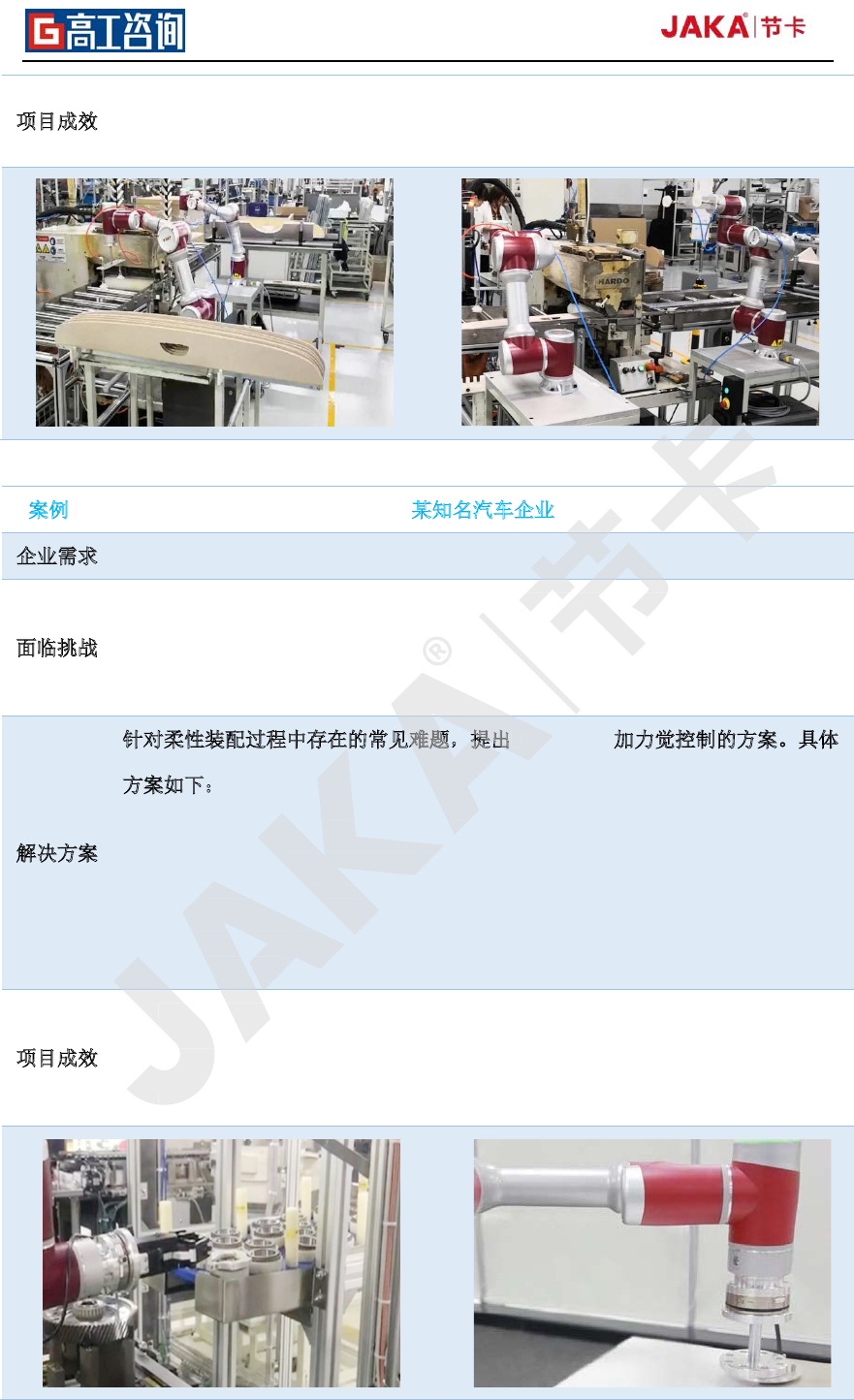
案例 2 某知名汽车企业
企业需求 汽车发动机柔性装配解决方案
面临挑战
1、 发动机齿轮箱深度较深,机器人在双销轴装配时,由于位姿、速度难以实现
同步,造成装配困难、甚至无法装配;
2、装配间隙小,精度要求高。
解决方案
针对柔性装配过程中存在的常见难题,提出JAKA Zu 7加力觉控制的方案。具体
方案如下:
1、
在双销轴装中引入力控自适应算法,实时检测双销轴的受力情况,在单边间隙
小于 0.02mm 的情况下,稳定可靠的完成装配;
2、 在装配过程中根据双销轴两边受力情况,不断调整 JAKA Zu 7 的位姿、速度,
实现装配要求。
项目成效
1、
在运行过程中,机器人会根据受力情况,实时改变其自身的位姿、速度,有效
防止工件的损耗、提高劳动生产率;
2、 把人从装配线中解放出来,降低人工成本,提高生产线的自动化程度。
汽车发动机柔性装配解决方案
发动机齿轮箱深度较深,机器人在双销轴装配时,由于位姿、速度难以实现
汽车发动机柔性装配解决方案
发动机齿轮箱深度较深,机器人在双销轴装配时,由于位姿、速度难以实现
在双销轴装中引入力控自适应算法,实时检测双销轴的受力情况,在单边间隙
的情况下,稳定可靠的完成装配;
在双销轴装中引入力控自适应算法,实时检测双销轴的受力情况,在单边间隙
的情况下,稳定可靠的完成装配;
在装配过程中根据双销轴两边受力情况,不断调整
0.02mm
在装配过程中根据双销轴两边受力情况,不断调整
实现装配要求。
在运行过程中,机器人会根据受力情况,实时改变其自身的位姿、速度,有效
提
出
见
难
题
提
J
AKA Z
在双销轴装中引入力控自适应算法,实时检测双销轴的受力情况,在单边间隙
在运行过程中,机器人会根据受力情况,实时改变其自身的位姿、速度,有效
防止工件的损耗、提高劳动生产率;
把人从装配线中解放出来,降低人工成本,提高生产线的自动化程度。
同步,造成装配困难、甚至无法装配;
同步,造成装配困难、甚至无法装配;