00198450-04_UM_TX-V2_PL.pdf - 第143页
Instrukcja eksploatacji SIPLACE TX 3 Dane techniczne i zespoły Od wersji oprogramowania 714.0 12/2020 3.6 System portali 143 3.6.4 Budowa osi Y 3 Rys. 3.6 - 4 Budowa osi Y Oś Y składa się z następujących głów nych zespoł…
3 Dane techniczne i zespoły Instrukcja eksploatacji SIPLACE TX
3.6 System portali Od wersji oprogramowania 714.0 12/2020
142
3.6.3 Budowa portalu
3
Rys. 3.6 - 3 Budowa portalu – widok od strony mocowania głowicy
(1) Płyty głowicy
(2) Wysięgnik portalu
(3) Silnik liniowy Y ze stałą podporą (element pierwotny)
(4) Uchwyt płyt konwertera i uchwyt do wleczenia kabla
(5) Bufor położenia krańcowego (cztery sztuki)
(6) System prowadnic z magnesem trwałym (część wtórna silnika liniowego osi X)
(7) System pomiaru długości
(8) Zamocowanie głowicy z silnikiem liniowym X (część pierwotna)
(4)
(3)
(1)
(5)
(2)
(6)
(7)
(5)
(8)
Instrukcja eksploatacji SIPLACE TX 3 Dane techniczne i zespoły
Od wersji oprogramowania 714.0 12/2020 3.6 System portali
143
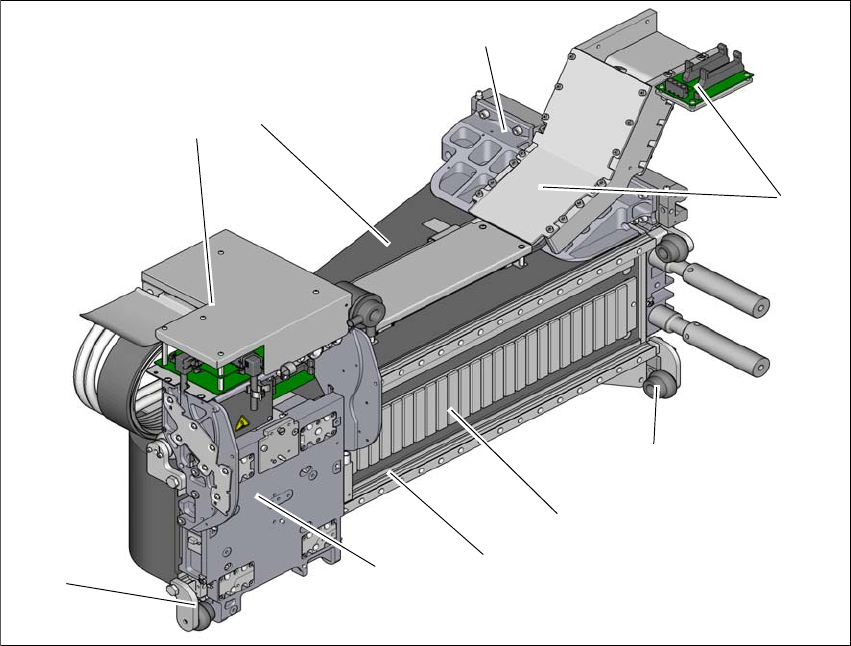
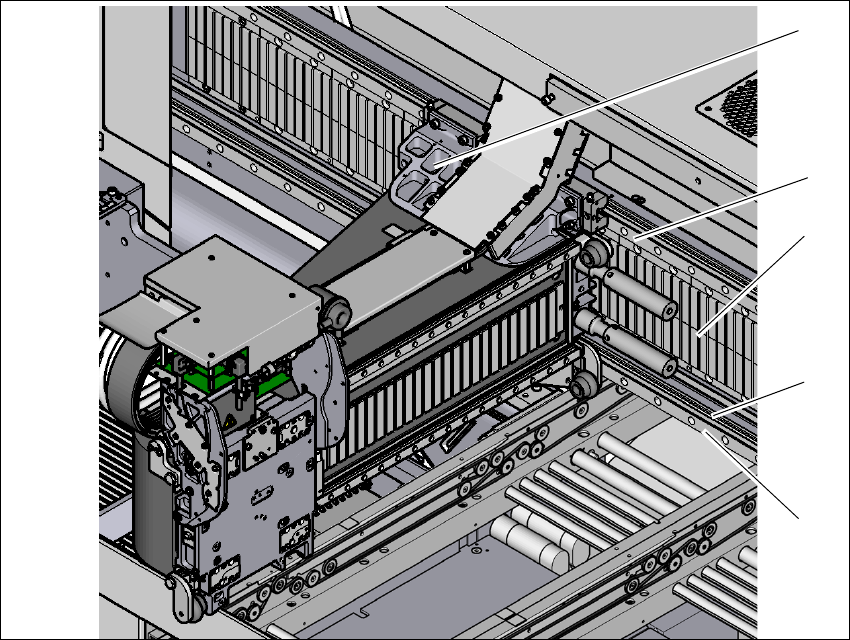
3.6.4 Budowa osi Y
3
Rys. 3.6 - 4 Budowa osi Y
Oś Y składa się z następujących głównych zespołów:
(1) Silniki liniowe Y (część pierwotna) w osi X z łożyskiem stałym i przesuwnym
(2) Magnes stały (część wtórna silnika liniowego Y)
(3) System pomiaru długości
(4) System prowadnic
(1)
(4)
(3)
(2)
(4)
3 Dane techniczne i zespoły Instrukcja eksploatacji SIPLACE TX
3.7 Układ transportowy POD Od wersji oprogramowania 714.0 12/2020
144
3.7 Układ transportowy POD
3.7.1 Opis
Przenośniki płytek drukowanych mają konstrukcję trójczłonową, podzieloną na taśmę wejściową,
obszar montażu i taśmę wyjściową. Dwa obszary: taśma wejściowa i taśma wyjściowa służą jako
strefy buforowe dla płytek drukowanych.
Taśmy transporterów są napędzane bezszczotkowymi silnikami prądu stałego. Transport płytek
drukowanych jest nadzorowany i sterowany fotokomórkami. Gdy płytka drukowana dojdzie do
sekcji uzbrajania i minie zaporę świetlną, jest wyhamowywana. Laserowa zapora świetlna reje-
struje pozycję płytki drukowanej. Gdy tylko płytka drukowana osiągnie pozycję zadaną, taśma
transportera jest zatrzymywana i płytka drukowana zaciskana od spodu.
Odległość między górną powierzchnią płytki drukowanej i głowicą montażową pozostaje niezmie-
niona dla każdej płytki drukowanej i nie zależy od jej grubości. Odpowiednio także prędkość
uzbrajania nie zależy od grubości płytek. Ponadto możliwe jest zoptymalizowanie centrowania
znaczników płytek drukowanych. Dzięki stałej odległości między powierzchnią płytki drukowanej
i kamerą, ogniskowa kamery jest zawsze dokładnie ustawiona na powierzchnię płytki drukowanej.
Kontury znaczników płytki drukowanej są optymalnie odwzorowane na układzie CCD kamery do
płytek drukowanych.
Szerokość transportera płytek drukowanych jest ustawiana i monitorowana elektronicznie przez
zintegrowany obwód regulacji. Może być wybierana wywołaniem programowym. W tym celu elek-
troniczny układ regulacji włącza silnik napędowy tak długo, aż zostanie osiągnięta żądana szero-
kość. Regulacja szerokości jest więc niezależna od innych komponentów maszyny.
W automacie można wybrać taką wysokość przenośnika, aby można go było zintegrować z liniami
o wysokości przenośników 900, 930 lub 950 mm. Standardowa wysokość wynosi 930 mm.
Komunikację pomiędzy przenośnikami płytek drukowanych poszczególnych automatów monta-
żowych zapewnia interfejs SMEMA.