3D AOI软件编程手册_20201204 - 第15页
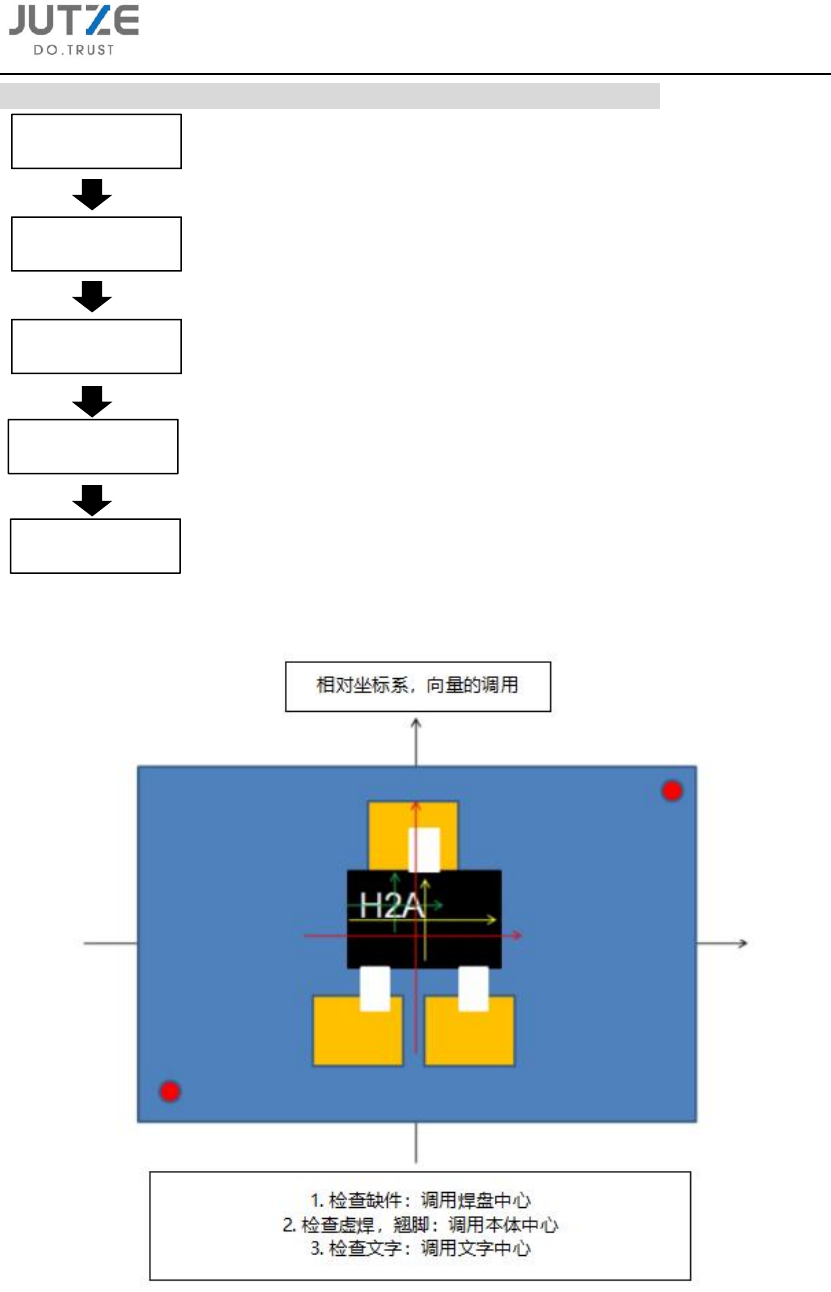
第二章 工作原理 V 7.0.4584.0-2 www .jutze. com.cn 15 / 136 注意:这样 的定位方式也 决定了程序 和元件资料库编 写的顺序。( 如下图) 导入 CAD 制作 M ark 焊盘定位 检测窗口 2.4.2 向量的 调用 本体定位
第二章 工作原理 V 7.0.4584.0-2
www.jutze.com.cn 14
/
136
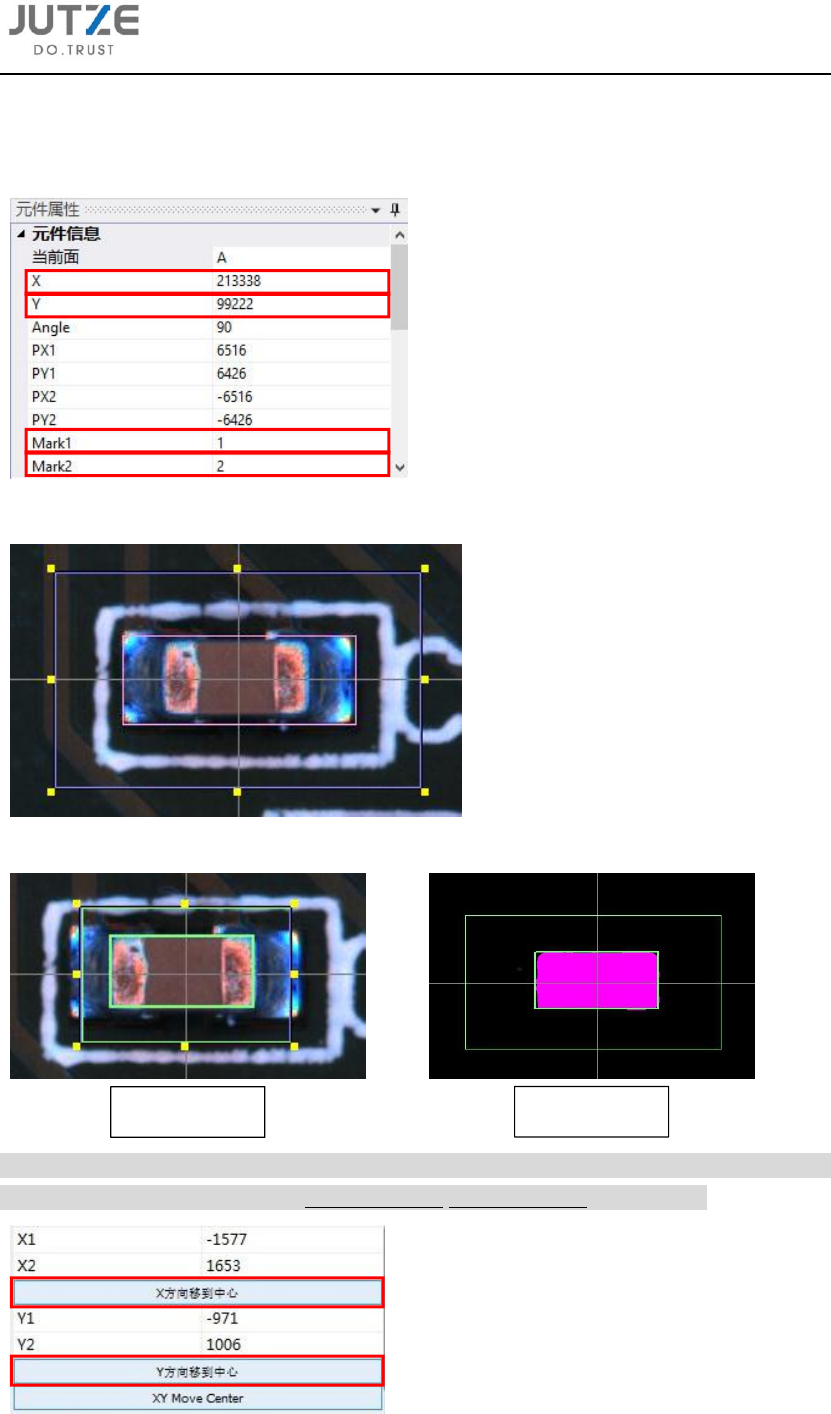
2.4 定位方式
2.4.1 三重定位方式
2.4.1.1 通过导入 CAD 得到 Mark 与元件本体框相对应位置关系;
2.4.1.2 通过焊盘定位,准确定位目标元件所在焊盘位置;
2.4.1.3 通过本体定位,准确定位实际元件所在位置。
二维图像定位
三维高度定位
注意:以上三者存在相对位置关系,在实际编程过程中,焊盘和本体的定位坐标系一定要位于本
体框的中心。如不在中心,需点击
X
方向移到中心
/Y
方向移到中心,进行调整。
第二章 工作原理 V 7.0.4584.0-2
www.jutze.com.cn 15
/
136
注意:这样的定位方式也决定了程序和元件资料库编写的顺序。(如下图)
导入 CAD
制作 Mark
焊盘定位
检测窗口
2.4.2 向量的调用
本体定位
第三章 软件主界面和基本操作指令介绍 V 7.0.4584.0-2
www.jutze.com.cn 16
/
136
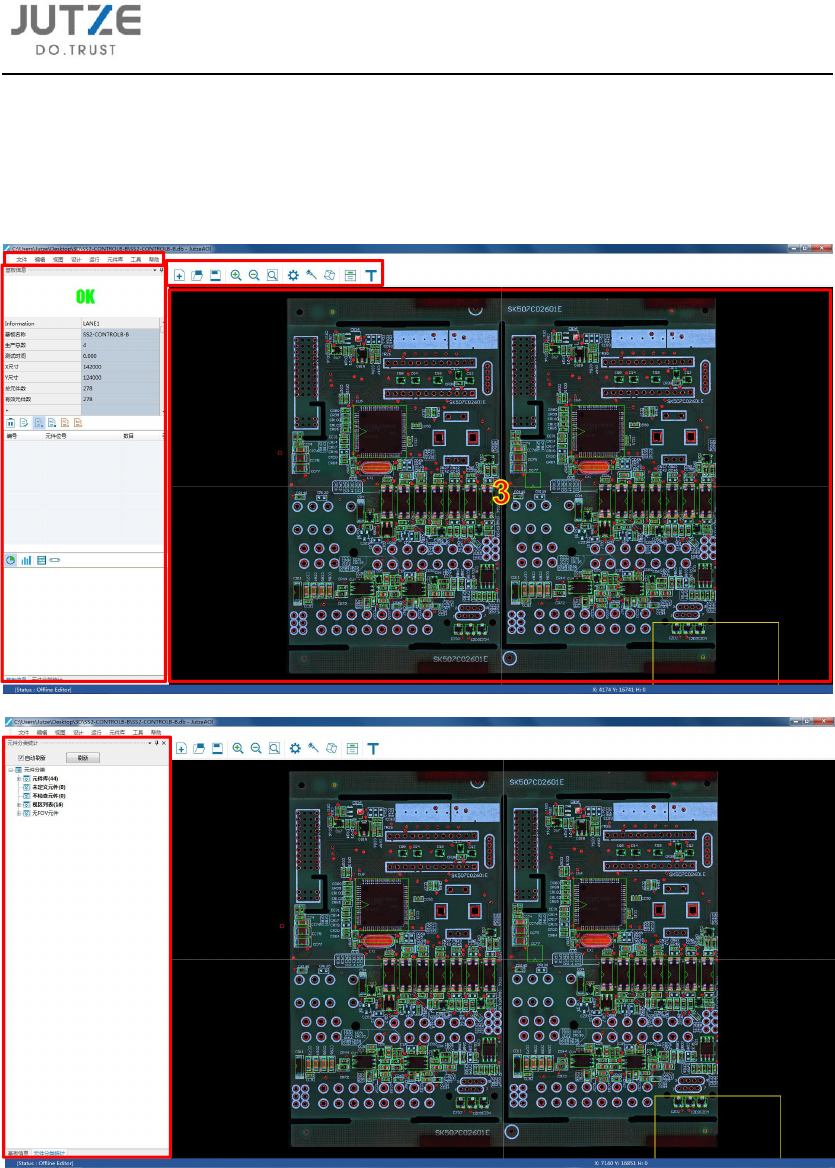
第三章 软件主界面和基本操作指令介绍
3.1 主界面
3.1.1 主界面图示
1
5
2
4