3D AOI软件编程手册_20201204 - 第93页
第十章 主要 算法逻辑解释 V 7.0.4584.0-2 www .jutze. com.cn 93 / 136 10.1 1 L eadBox 【照明光源 : BGR24 】 10.1 1.1 检查参数 引脚间距: 提供常规标 准脚间距,也 可自定义脚间距 (单位: μ m ) 引脚类型: 设定引脚类 型为长引脚或 者短引脚 引脚根部 % : 符 合 亮 度 和 颜 色 的 引 脚 根 部 长 度 之 和 占搜 索 窗 口 的 长 度…
第十章 主要算法逻辑解释 V 7.0.4584.0-2
www.jutze.com.cn 92
/
136
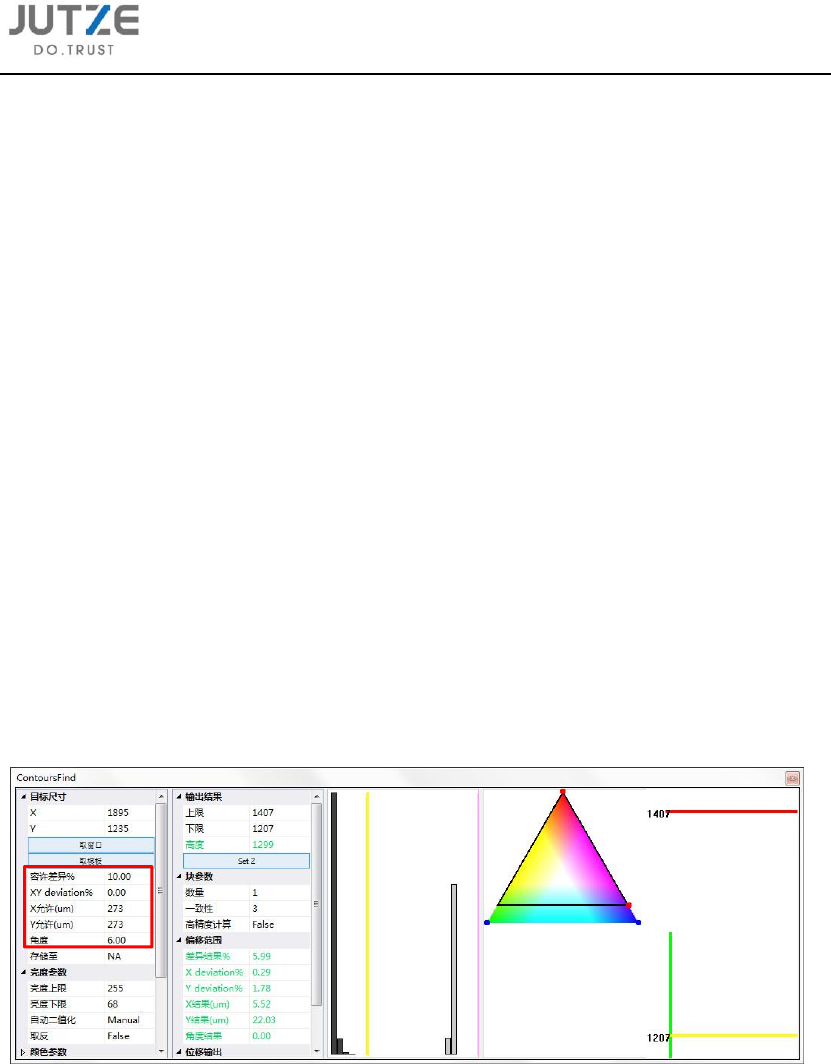
10.10.5 块参数
数量:
设定组成目标的连通区域数量
一致性:
连通区域几何尺寸的大小接近程度(0,1,2,3,4)
10.10.6 判定参数
容许差异%:
设定实际目标与设定目标之间容许差异百分比
XY deviation%:
设定实际目标与设定目标之间 XY 长度差异百分比
X 允许(μm):
设定实际目标中心与检测窗口中心 X 方向允许偏移量(μm)
Y 允许(μm):
设定实际目标中心与检测窗口中心 Y 方向允许偏移量(μm)
角度:
设定实际目标与检测窗口之间夹角的度数
10.10.7 2D 计算方法
计算检测窗口内部符合亮度和颜色设定的像素组成的尺寸大小最符合目标尺寸的连通区域的最
小外接矩形。并根据 10.10.6 中的判定参数逐个计算该外接矩形与目标尺寸的差异,当偏移范围
中的所有检测结果均符合判定参数范围时,判定结果为 OK。反之,判定结果为 NG。
10.10.8 位移输出
输出向量:同时输出包含 X 和 Y 方向的偏移量
【照明光源:3D】
10.10.9 输出结果
上限:设定高度最大值
下限:设定高度最小值
10.10.10 3D 计算方法
计算检测窗口内部符合亮度和颜色设定的像素组成的尺寸大小最符合目标尺寸的连通区域的最
小外接矩形和搜索窗口内部符合亮度和颜色设定的像素的高度平均值。并根据如上界面图红框中
的判定参数逐个计算该外接矩形与目标尺寸的差异,当偏移范围中的所有检测结果均符合判定参
数范围,并且搜索窗口内部符合亮度和颜色设定的像素的高度平均值满足设定的上下限范围时,
判定结果为 OK。反之,判定结果为 NG。
第十章 主要算法逻辑解释 V 7.0.4584.0-2
www.jutze.com.cn 93
/
136
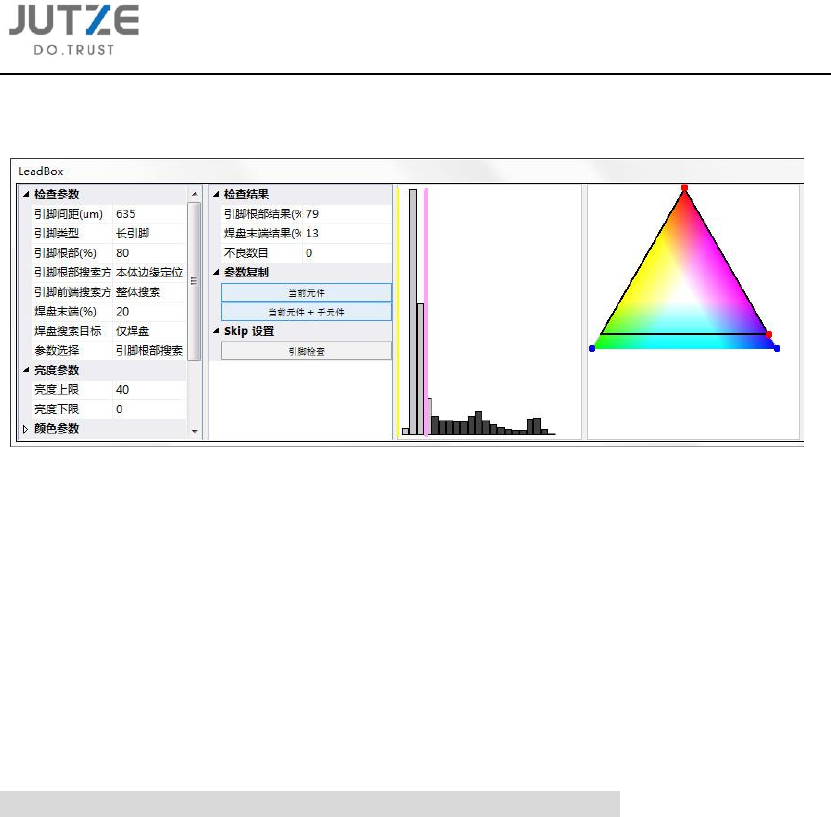
10.11 LeadBox
【照明光源:BGR24】
10.11.1 检查参数
引脚间距:
提供常规标准脚间距,也可自定义脚间距(单位:μm)
引脚类型:
设定引脚类型为长引脚或者短引脚
引脚根部%:
符合亮度和颜色的引脚根部长度之和占搜索窗口的长度百分比(详见图解一)
引脚根部搜索方法:
可选本体边缘定位、引脚边缘定位
引脚前端搜索方法:
可选整体搜索、直线耦合、单独搜索
焊盘末端%:
符合亮度和颜色的焊盘末端长度之和占搜索窗口的长度百分比(详见图解二)
焊盘搜索目标:
可选仅焊盘、仅焊锡、焊盘+焊锡
参数选择:
引脚根部搜索、引脚、焊锡、焊盘
注意:引脚根部、引脚、焊锡、焊盘各有一套独立的亮度和颜色参数。
10.11.2 亮度参数(可使用鼠标通过直方图来设定)
亮度上限:设定最高亮度值(0~255)
亮度下限:设定最低亮度值(0~255)
10.11.3 颜色参数(可使用鼠标通过色彩图来设定)
红色上限:设定红色最大值(0~173)
红色下限:设定红色最小值(0~173)
绿色上限:设定绿色最大值(0~173)
绿色下限:设定绿色最小值(0~173)
蓝色上限:设定蓝色最大值(0~173)
蓝色下限:设定蓝色最小值(0~173)
10.11.4 计算方法
引脚根部结果:
根据引脚根部设定参数,计算出最接近设定的百分比的值定位引脚根部,
再加上设定的引脚长度(第一个子检测窗口:本体不良)和引脚的设定参
数来定位引脚顶端(白色虚线:详见图解三红框处)

第十章 主要算法逻辑解释 V 7.0.4584.0-2
www.jutze.com.cn 94
/
136
焊盘末端结果:
根据焊盘末端设定参数,计算出最接近设定的百分比的值定位焊盘末端
(黄色虚线:详见图解三绿框处)
检查结果:
统计所有检测窗口结果均符合上限和下限之间,显示不良数目:0,判定
结果为 OK。反之,则按实际不良窗口进行统计数目,判定结果为 NG。
注意:
LeadBox
主检测窗口只用于定位引脚和焊盘,实际检测缺陷由子检测窗口执行。
10.11.5 参数复制
不含子元件的元件库,可使用当前元件对 LeadBox 算法中的检测窗口进行复制
包含子元件的元件库,可使用当前元件+子元件对 LeadBox 算法中的检测窗口进行复制
10.11.6 Skip 设置
点击引脚检查,在弹窗中去除勾选,可 skip(跳过)所去除勾选的引脚的检查项
图解一:
黄色箭头总长度:符合亮度和颜色的引脚根部长度之和
绿色箭头总长度:搜索窗口的长度
“71”:上述两个值的百分比,即按“引脚根部搜索”参数选择进行检查的“引脚根部%”值。