FX-1R_操作手册.pdf - 第171页
第 4 章 生产程序编辑 Rev03 b. 设定激光高度 设定 固定臂的端点位置到激光面的距离。 设定目标:-(元件高度-3.5mm ※ )/2 ,根据引脚位置微调。 ※:图 1 的“c”到固定臂的尺寸=3.5mm 例:元件高度为 5mm 时 -(5-3.5)/ 2 =-0.75mm 图 4-3- 5-12 ⅳ) 设定吸取数据 XY 与通常的示教方法相同。Z:根据机器设置中注册的吸嘴信息以及元件高度自动计算, 不需要示教。 4-45
第 4 章 生产程序编辑 Rev03
12)夹持吸嘴数据
夹持吸嘴为选购项目设定项目如下:
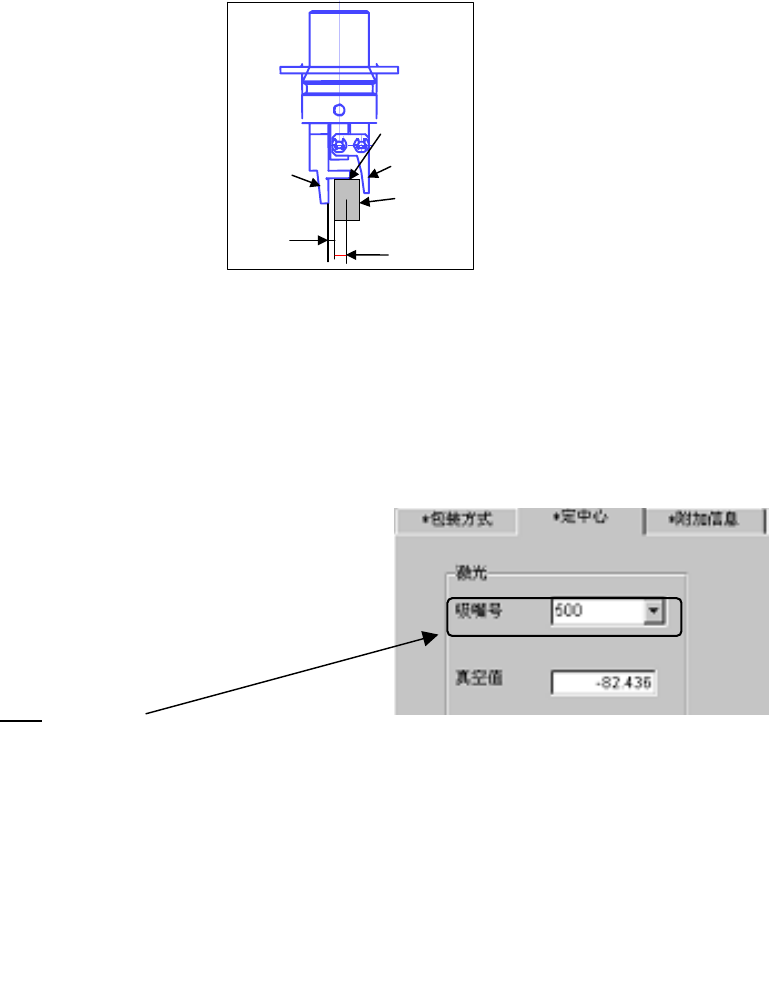
①接触面位置 : “Y”项,输入元件中心相对于夹持吸嘴固定侧手臂抓取面中心的偏
移值(图 1-a),用负值(-a)输入。”X” 不要输入 0 以外的值。
②水平间隙 :夹持吸嘴固定側手臂抓取面与元件之间的空隙(图 1-b),用负值输入
(-b)。请注意:吸嘴类型、吸嘴方向不同,移动方向各异。
③吸取时的吸嘴方向 :是指元件以 0 度供应时,吸嘴吸取时的方向。从 0 度,90 度,180 度,
270 度中指定。
④吸取高度微调值 :是指吸取时的吸取高度偏移值(c 与元件上面的空隙)。
通常,为保持元件为水平状态设定为-0.5mm
a
b
元件
c
固定
臂
旋臂
<使用夹持吸嘴时的设定项目>
夹持吸嘴除上述“吸嘴数据”以外,下列设定与普通元件不同。
ⅰ) 使用新的夹持吸嘴时,先选择「机器设置」的“文件”/“读取吸嘴数据[FD]”,从软盘
中读取夹持吸嘴的信息。
ⅱ) 将吸嘴安装在 ATC 上。
将夹持吸嘴安装在 ATC 上。方向是:从正
面看 ATC 单元时,夹持吸嘴的固定手臂在
后侧,旋臂应在前侧。
ⅲ)设定元件数据。
a.
设定吸嘴号
吸嘴号是 800 多号。
图 4-3-5-11
4-44
第 4 章 生产程序编辑 Rev03
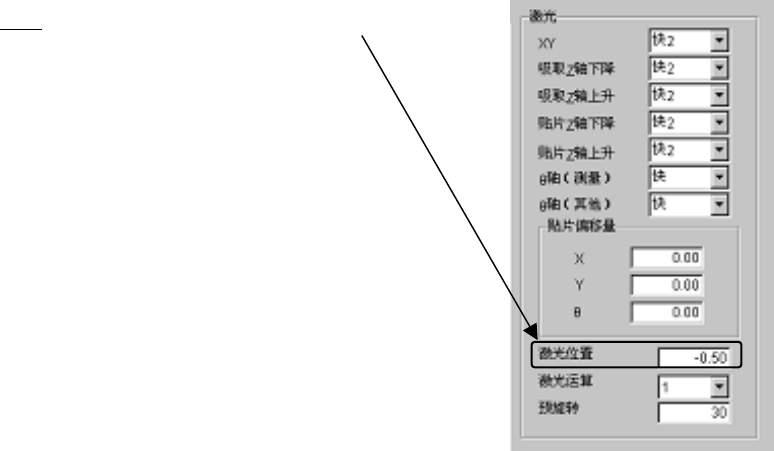
b. 设定激光高度
设定
固定臂的端点位置到激光面的距离。
设定目标:-(元件高度-3.5mm
※
)/2
,根据引脚位置微调。
※:图 1 的“c”到固定臂的尺寸=3.5mm
例:元件高度为 5mm 时
-(5-3.5)/2 =-0.75mm
图 4-3-5-12
ⅳ) 设定吸取数据
XY 与通常的示教方法相同。Z:根据机器设置中注册的吸嘴信息以及元件高度自动计算,
不需要示教。
4-45
第 4 章 生产程序编辑 Rev03
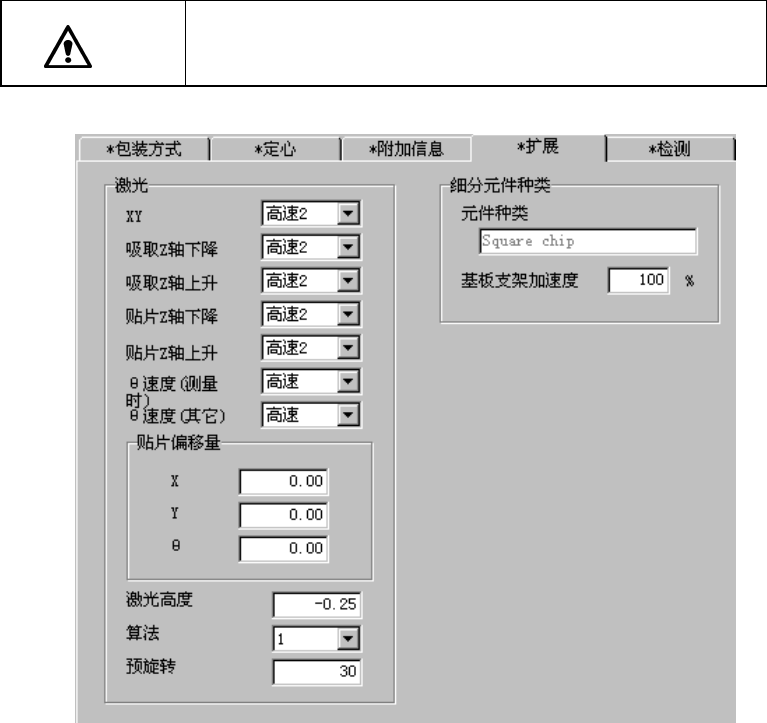
4-3-5-2-5. 扩展
变更扩展项目后,如果变更了基础部分的项目时,扩展值会
恢复到默认值。
注意
图 4-3-5-13 元件数据(扩展)
1) “XY”,“吸取 Z 轴下降/上升”,“贴片 Z 轴下降/上升”
设定 XY,Z 轴移动时的速度。
有高速、中速、低速,低速运行可以作业稳定,但效率低。
2)
θ
速度
设定吸嘴保持元件状态的
θ
轴速度。
①测量时
设定激光识别时的
θ
轴的加速度。
②测量外
设定激光识别以外的θ轴加速度(激光定心后旋转到贴片角度等)。
4-46