1OM-1601-007_w.pdf - 第181页
1OM-1601 4-2 4 章 1. 仕 様 1003-003 項 目 内 容 8. 基板の切欠き および穴の制限 3 0 . 5 1 5 9 2 5 5 基板流 れ方 向 右 → 左 1 5 3 0 . 5 9 2 5 5 1 5 基板流 れ方 向 左 → 右 1 5 基板ス トッ パ 単位 : mm F1E3 注 : 斜線部が、切欠き不可の範囲です。 斜線部に切欠きおよび穴がある場合は、基板位置決めティーチングモー ドで正常に基板…
1OM-1601
4-1
4 章 1. 仕 様
1105-005
1. 仕 様
1.1 SIGMA-G5 チップマウンタ仕様
項 目 内 容
1. 型式名 SIGMA-G5
2. 概 要
本装置は、装置の前面または後面からの両面操作方式を採用しており、基板の
搬送はシングル搬送となります。
3. スループット
高速ヘッド 多機能ヘッド
70,000 CPH / モジュール
注 : 最適条件時で基板移載時間含ま
ず。
チップ部品 : 14,500CPH / 2 ヘッド
注 : 最適条件時で基板移載時間含ま
ず。
4. 装着精度
高速ヘッド 多機能ヘッド
0603 / 0402 : 40 μ m (3
σ) IC : 30 μ m (3 σ)
5. 基板移載時間
約 2 秒 ( 最適条件時、基板長さ 260 mm 以下であること )
6. 基板流れ方向と
搬送基準
基板流れ方向 : 左から右 / 右から左 ( 工場出荷時選択 )
搬送基準 : 奥左 / 奥右 / 手前左 / 手前右 ( 工場出荷時選択 )
7. 対象基板
大きさ : 50 × 50 ~ 610 × 460 mm ( 四隅は R1 ~ R1.5 mm)
厚 さ : 0.3 ~ 5.0 mm
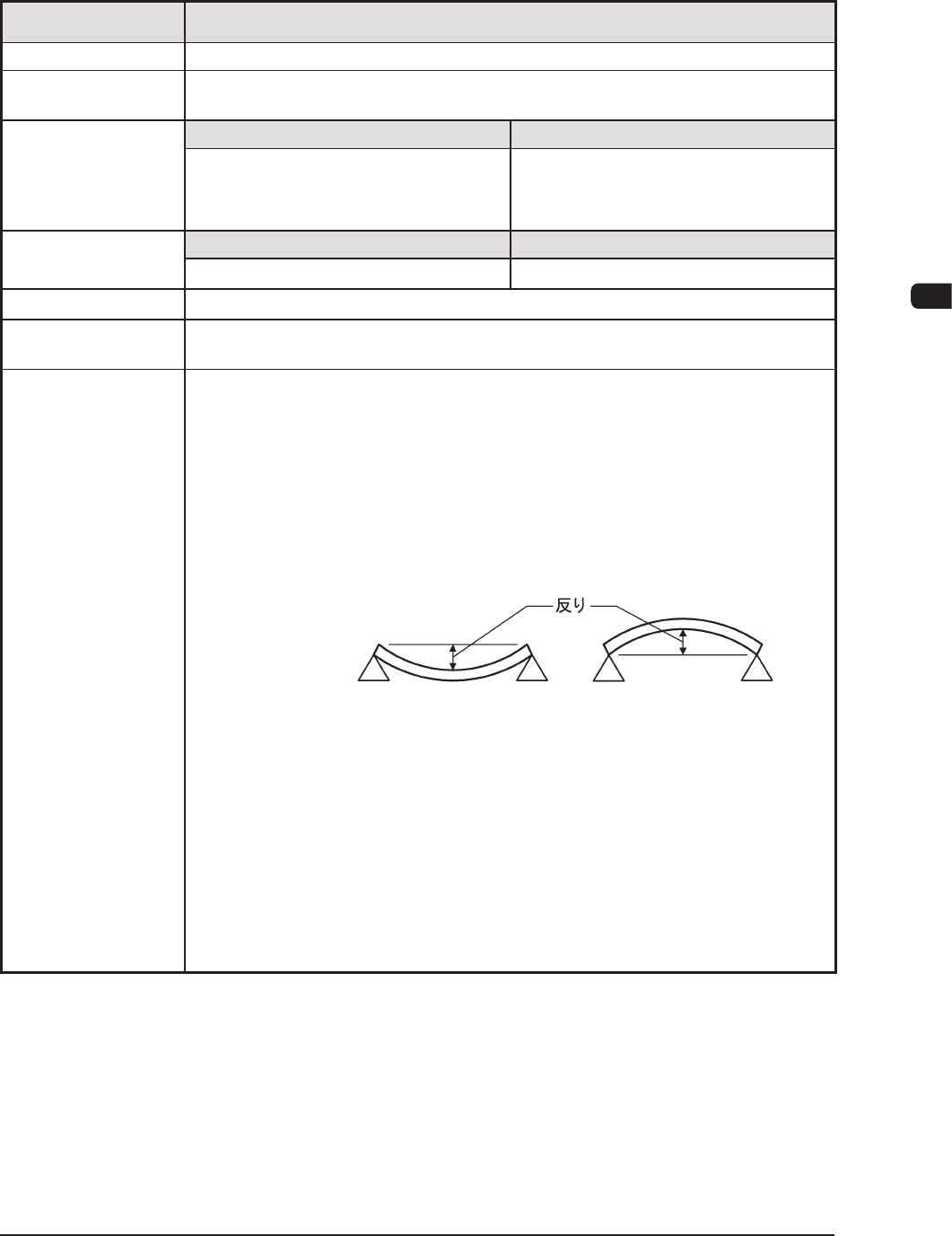
反 り : 以下の二つの条件を満たすこと。
• 単位長さ 50 mm あたり 0.2 mm 以下
例 : 基板の大きさ 200 mm の場合、
反りは 0.8 mm 以下。
• Max. 1.0 mm
例 : 基板の大きさが 250 mm を超える場合は、反りは 1.0 mm 以下。
F1E2
質 量 : Max. 2.5 kg ( 基板完成時 )
ただし、X 寸法 260 mm 以下は、Max. 1.5 kg ( 基板完成時 )
材 質 : ガラスエポキシ
セラミック ( オプション )
注 : (a) ガラスエポキシの色が淡色のものについては、当社営業部または販
売代理店にご相談ください。
(b) 基板の材質、形状、反り、質量、表面状態 ( 光沢 ) などによっては、
正常に基板搬送や部品装着ができるかどうかを、テストで確認する
必要があります。
T1E1-1
1OM-1601
4-2
4 章 1. 仕 様
1003-003
項 目 内 容
8. 基板の切欠き
および穴の制限
3 0 .5
1 5
9
2 55
基板流れ方向
右 → 左
1 5
3 0 .5
9
2 55
1 5
基板流れ方向
左 → 右
1 5
基板ストッパ
単位 : mm
F1E3
注 : 斜線部が、切欠き不可の範囲です。
斜線部に切欠きおよび穴がある場合は、基板位置決めティーチングモー
ドで正常に基板が位置決めできるか確認してください。
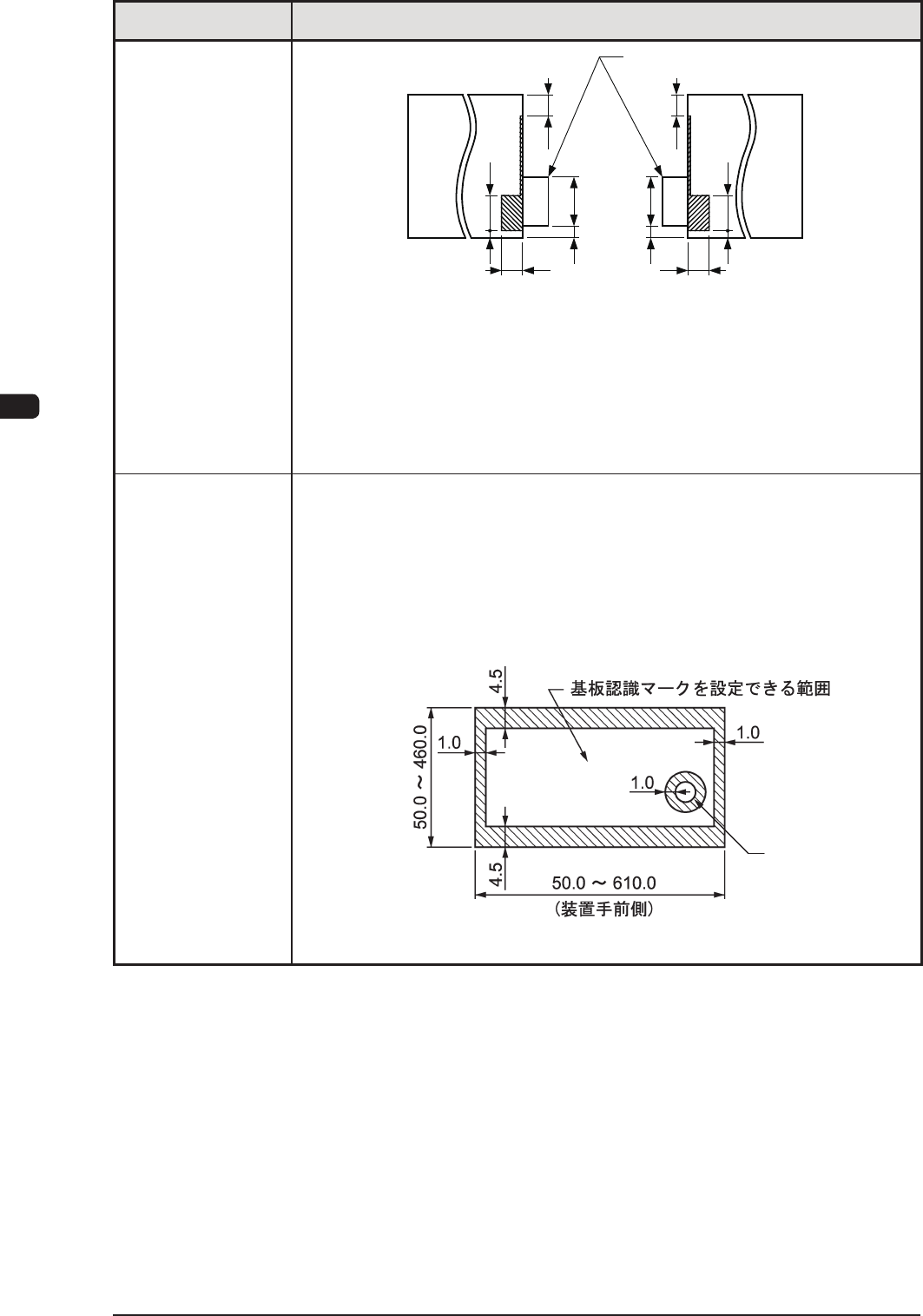
9. 基板位置補正
方法
基板認識
• 基板認識マークを基板認識カメラで認識することにより、基板全体の位置
ズレ量および基板印刷パターンの伸びを補正します。
• 基板全体補正用には、基板上 ( ゾーン 1 ~ 5) に 2 か所または 3 か所基板認
識マークを設定 ( 多面取り基板の場合は各基板毎に 2 か所 ) します。
• 部品装着点補正用には、基板上に 1 ~ 2 か所基板認識マークを設定します。
この場合には、点対称となる基板認識マーク 2 か所の重心位置が部品装着
点中心となるように設定することを推奨します。
穴等
単位 : mm
F1E4
T1E1-2
1OM-1601
4-3
4 章 1. 仕 様
1003-003
項 目 内 容
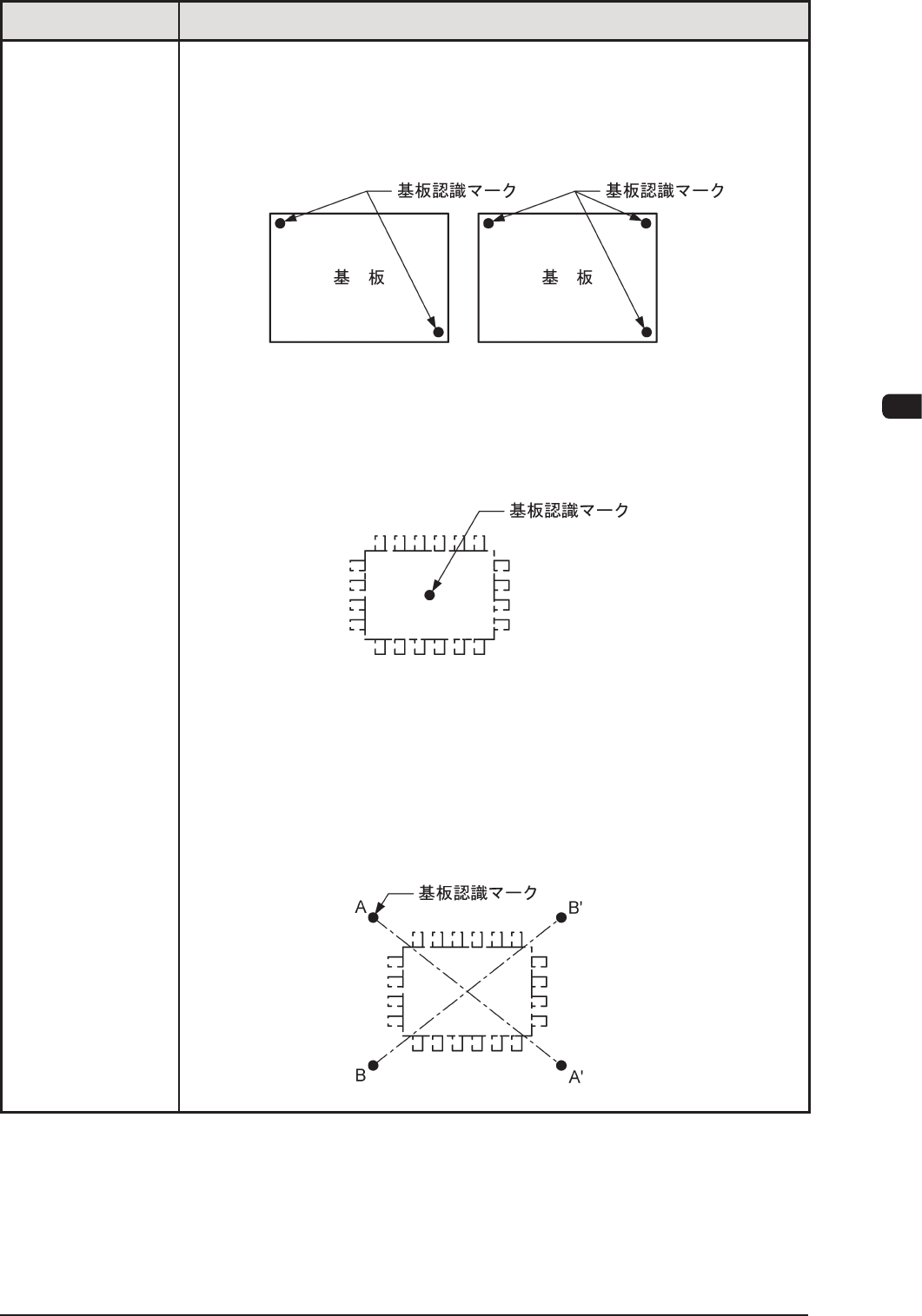
基板全体補正用の例
認識精度を上げるため、2 点認識の場合は基板認識マークを対角位置に配置
してください。
また、3 点認識の場合は、2 か所は対角位置に、もう 1 か所は残りのコーナー
近辺に配置してください。
F1E5
部品装着点補正用の例 1 (1 点認識 )
部品装着点中心またはその周辺近傍の任意の 1 点に基板認識マークを配置し
てください。
推奨位置 : 部品装着点中心
F1E6
部品装着点補正用の例 2 (2 点認識 )
部品装着点中心近傍の任意の 2 点に基板認識マークを配置してください。
推奨位置 : 点対称
部品装着点中心に対し、点対称となる 2 点を推奨いたします。
(A-A’ / B-B’)
• 本基板認識マーク (2 点 ) により部品装着位置および角度が補正されます。
なお、2 点認識は、局所的な印刷パターンのズレおよび歪みに有効です。
F1E7
T1E1-3