1OM-1601-007_w.pdf - 第80页
1OM-1601 1-25 1 章 3. 表面実装のための機構 3.6 基板認識部 各ビーム上に一機ずつの基板認識カメラおよび照明用の光源が搭載され ており、装着ヘッドと対になっています。 基板上に設けられた基板認識マークを基板認識カメラで検出し、認識マー ク座標データとの位置ズレの量を算出して、部品の装着位置を自動的に補 正します。 基板認識カメラ F1A21 基板認識部の主な機能は、基板認識マークの位置検出と形状判定を行うこ とにあ…
1OM-1601
1-24
1 章 3. 表面実装のための機構
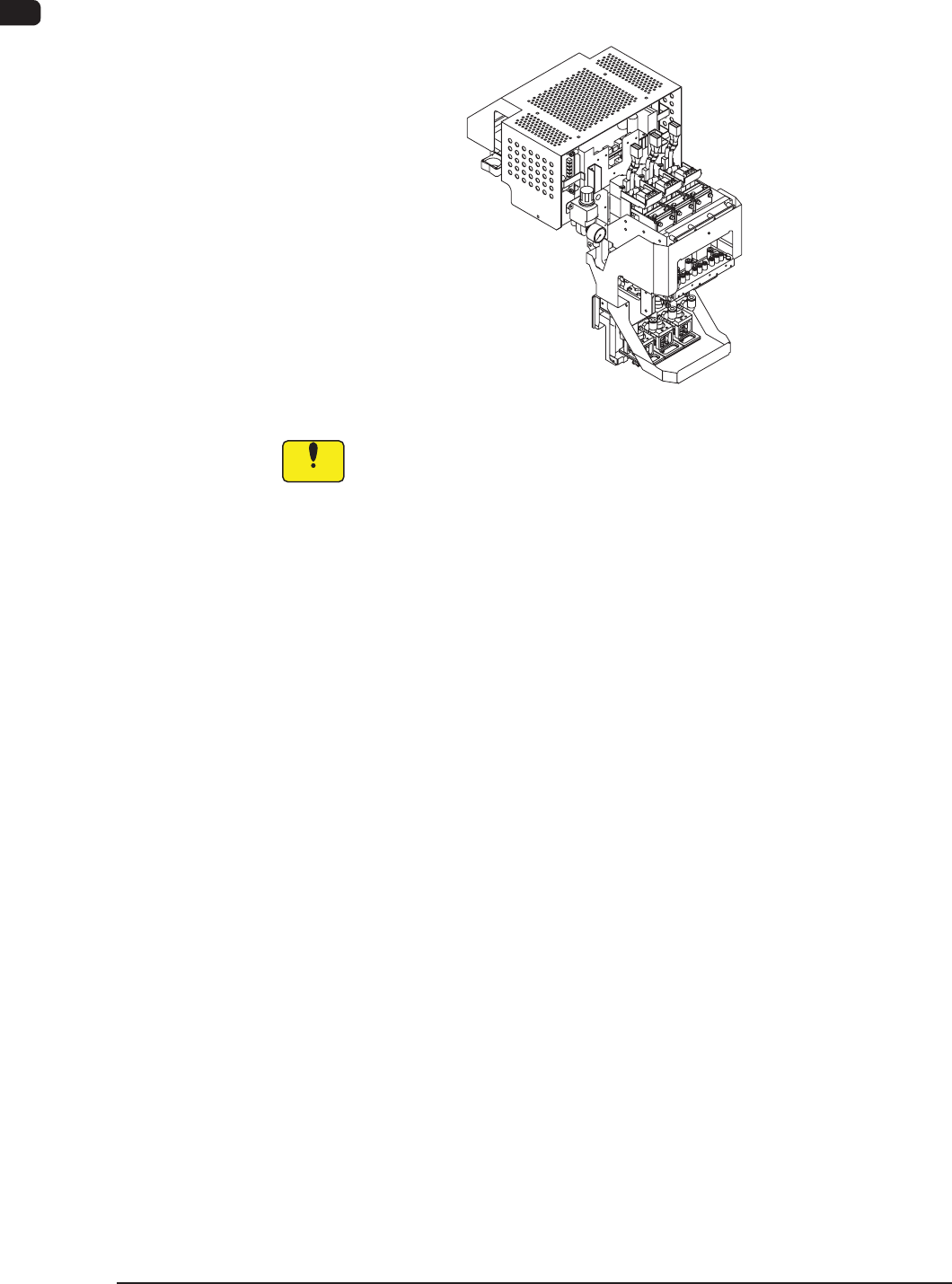
3.5.2 多機能ヘッド
多機能ヘッドには、ノズル配置位置が 3 か所あり、最大 3 種類のノズルを
取付けることができ、多機能部品の吸着を行います。
F1A20
注 意
(a) 装着ヘッドの拡散板に油、傷などを付けないでください。
部品認識時に異常が発生する可能性があります。
(b) 吸着ノズルに磁石などの磁気を帯びているものを近づけないでくだ
さい。
部品吸着、部品装着時などに異常が発生する可能性があります。
1010-003

1OM-1601
1-25
1 章 3. 表面実装のための機構
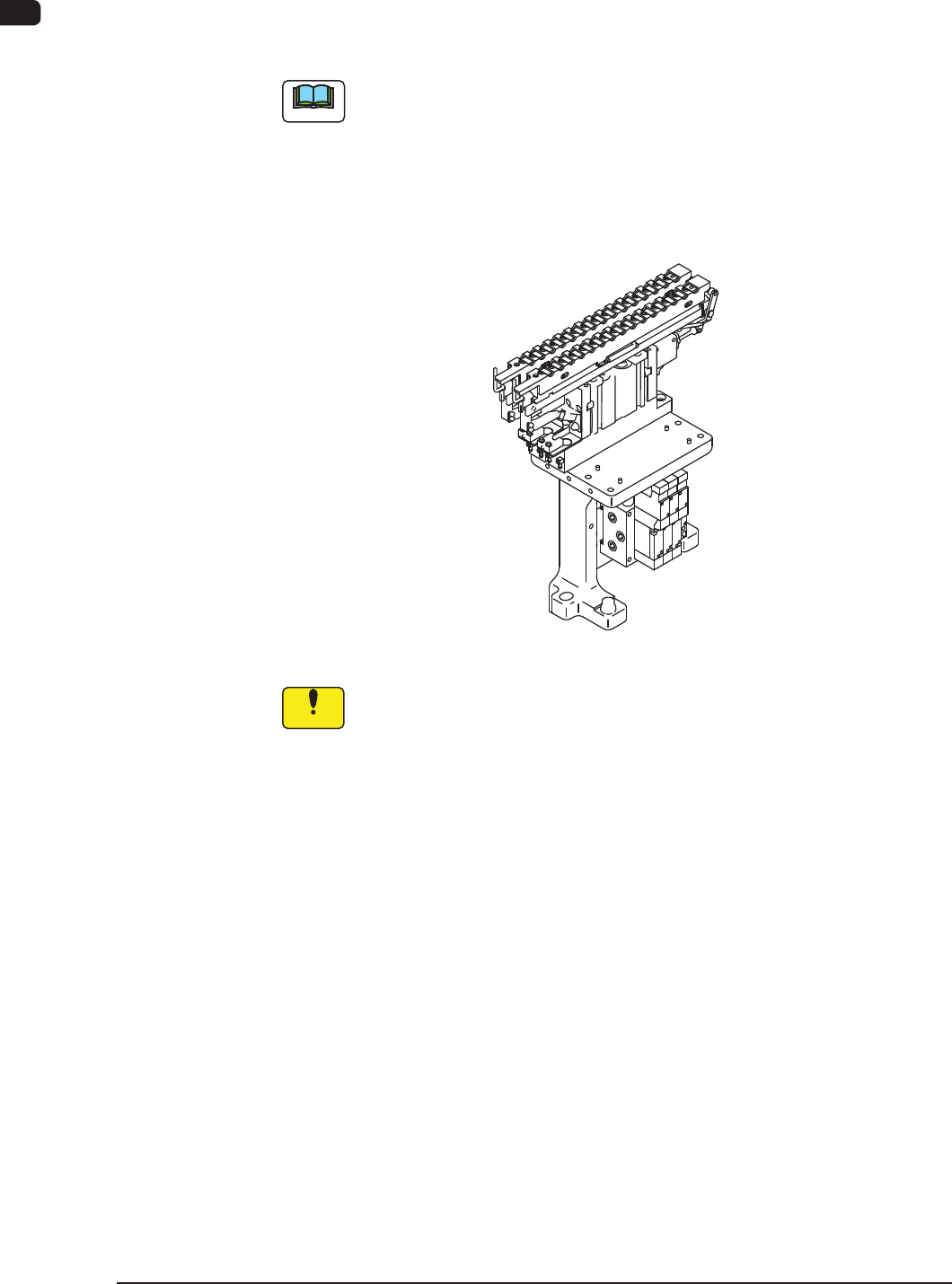
3.6 基板認識部
各ビーム上に一機ずつの基板認識カメラおよび照明用の光源が搭載され
ており、装着ヘッドと対になっています。
基板上に設けられた基板認識マークを基板認識カメラで検出し、認識マー
ク座標データとの位置ズレの量を算出して、部品の装着位置を自動的に補
正します。
基板認識カメラ
F1A21
基板認識部の主な機能は、基板認識マークの位置検出と形状判定を行うこ
とにありますが、それ以外にもフィーダ位置の検出や、フライ撮像位置補
正も行います。
0906-002
1OM-1601
1-26
1 章 3. 表面実装のための機構
3.7 ノズルストッカ部
吸着ノズルを収納するための機構です。
装着ヘッドが、パターンプログラムにしたがってノズルストッカ上へ移動
し、使用する吸着ノズルを着脱します。
ノート
(a) 高速ノズルストッカ、多機能ノズルストッカと中異形ノズルストッ
カ ( オプション ) の 3 種類があり、吸着ノズルにより使い分けます。
(b) 標準で取付けできるノズルストッカは、各ブロックにつき、高速ノ
ズルストッカの場合は 2 つ、多機能ノズルストッカの場合は 1 つに
なります。複数のノズルストッカを搭載する場合は、オプション対
応となります。
高速ノズルストッカ ( 外観 ) F1A22
注 意
(a) ノズルストッカ部に異物を置かないでください。
装置が故障する原因となります。
(b) 吸着ノズルに、磁石などの磁気を帯びているものを近づけないでく
ださい。
部品吸着、部品装着時などに異常が発生する可能性があります。
1010-003