00196043-05 - SG X und X4I FSE_de.pdf - 第106页
Kommunikation und Steuerung Kommunikation CPP-Kopf CAN-Bus Student Guide SIPLACE X-Serie und X4I FSE 106 CAN-Bu s-Kommun ikation z u den DP -Antrieben 4.3.8.2 CAN-Bus-Kommunikation zu den DP-Antrieben Die Datenverso rgun…
Kommunikation und Steuerung
CAN-Bus Kommunikation CPP-Kopf
105 Student Guide SIPLACE X-Serie und X4I FSE
CAN-Bus gesteuerte Kopffunktionen am C&P20A-Kopf
Kommunikation CPP-Kopf
4.3.8 Kommunikation CPP-Kopf
Kommunik ation zu den DP-Antrieben
4.3.8.1 Kommunikation zu den DP-Antrieben
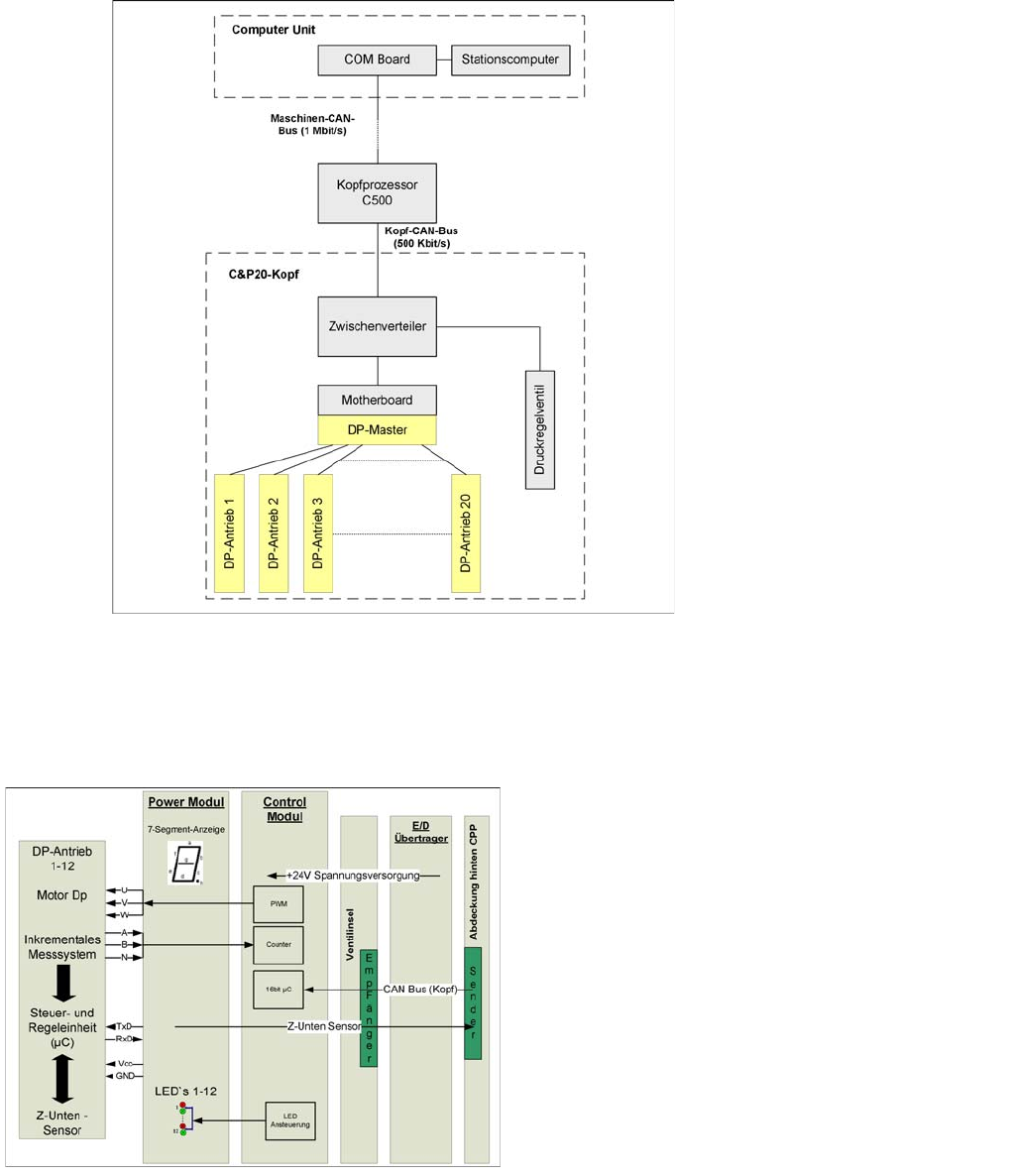
Die Regelung der DP-Antriebe erfolgt über eine
gemeinsame Hardware, die SCS (Single Core Solution).
Diese besteht aus zwei Platinen, dem Power- und dem
Control-Modul mit einem Mikroprozessor für die
Ablaufsteuerung.
Die Steuerungs- und Regelungsdaten kommen vom
Kopfprozessor und werden über den Kopf-CAN-Bus
übertragen.
Die Kommunikation mit der Lichtschranke Z_unten
erfolgt über eine eigene Schnittstelle direkt zum Power-
Modul. Dies ist notwendig, da in jedem Segment eine
Lichtschranke Z_unten integriert ist.
Kommunikation und Steuerung
Kommunikation CPP-Kopf CAN-Bus
Student Guide SIPLACE X-Serie und X4I FSE 106
CAN-Bus-Kommun ikation z u den DP -Antrieben
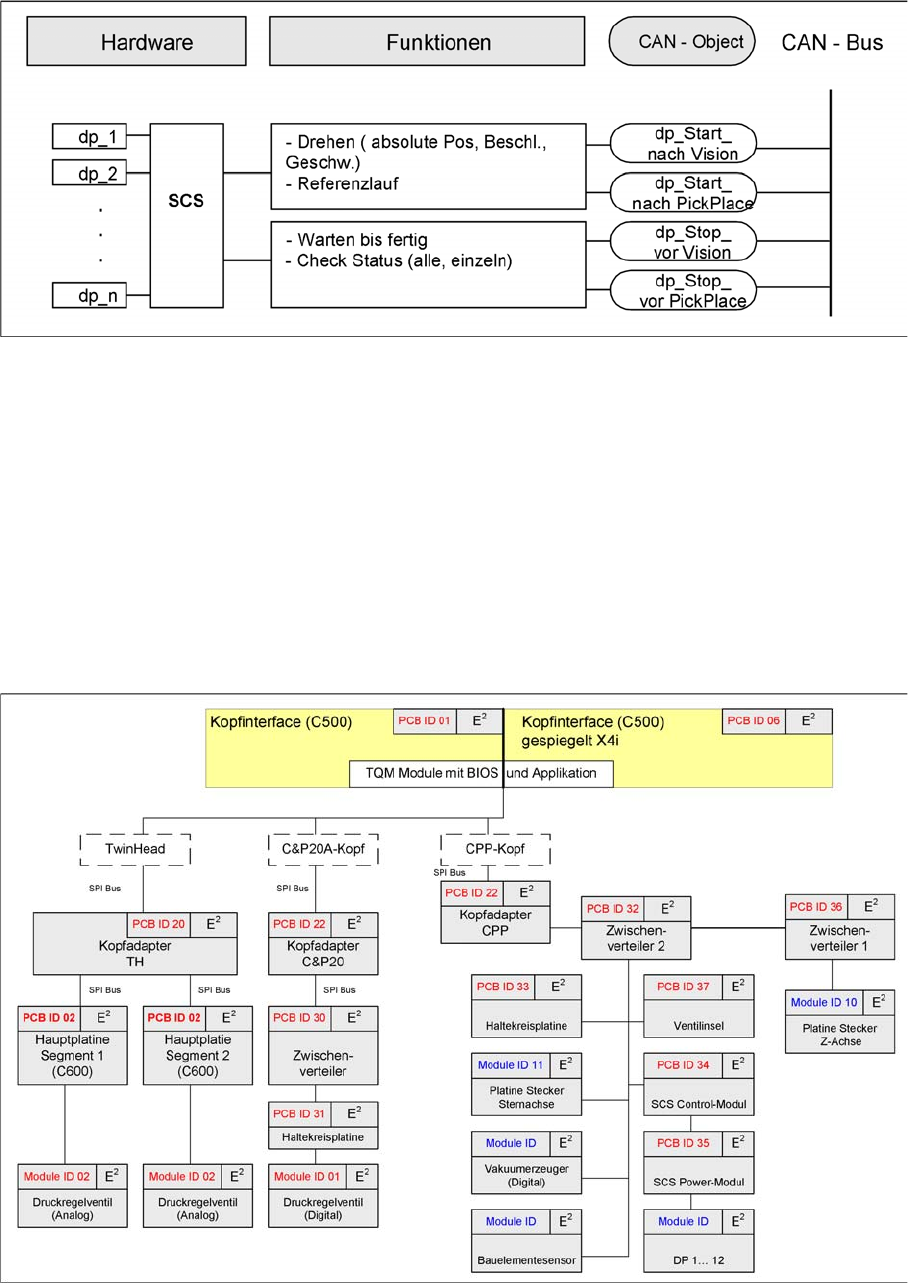
4.3.8.2 CAN-Bus-Kommunikation zu den DP-Antrieben
Die Datenversorgung erfolgt über den Kopf-CAN-Bus vom Kopfinterface zum Zwischenverteiler.
Die vier CAN-Bus-Kommandos sind identisch zum C&P20A-Kopf:
▪ Start einer bestimmten Drehachse nach Abholen/Bestücken
▪ Start einer bestimmten Drehachse nach Vision
▪ Warten auf eine bestimmte Drehachse vor Vision
▪ Warten auf eine bestimmte Drehachse vor Abholen/Bestücken
EEPROMs am CPP-Ko pf
4.3.8.3 EEPROMs am CPP-Kopf
Auf allen Platinen (ausgenommen E/D-Übertrager) befinden sich EEPROMs. Entsprechend deren
Funktionen werden dort verschiedene Daten wie Produktionsdatum, Materialnummer,
Nullpunktkorrekturwerte, Offsetwerte sowie Betriebs- und Statistikdaten hinterlegt.
Kommunikation und Steuerung
CAN-Bus Kommunikation X-Förderer
107 Student Guide SIPLACE X-Serie und X4I FSE
Datenübe rtragung
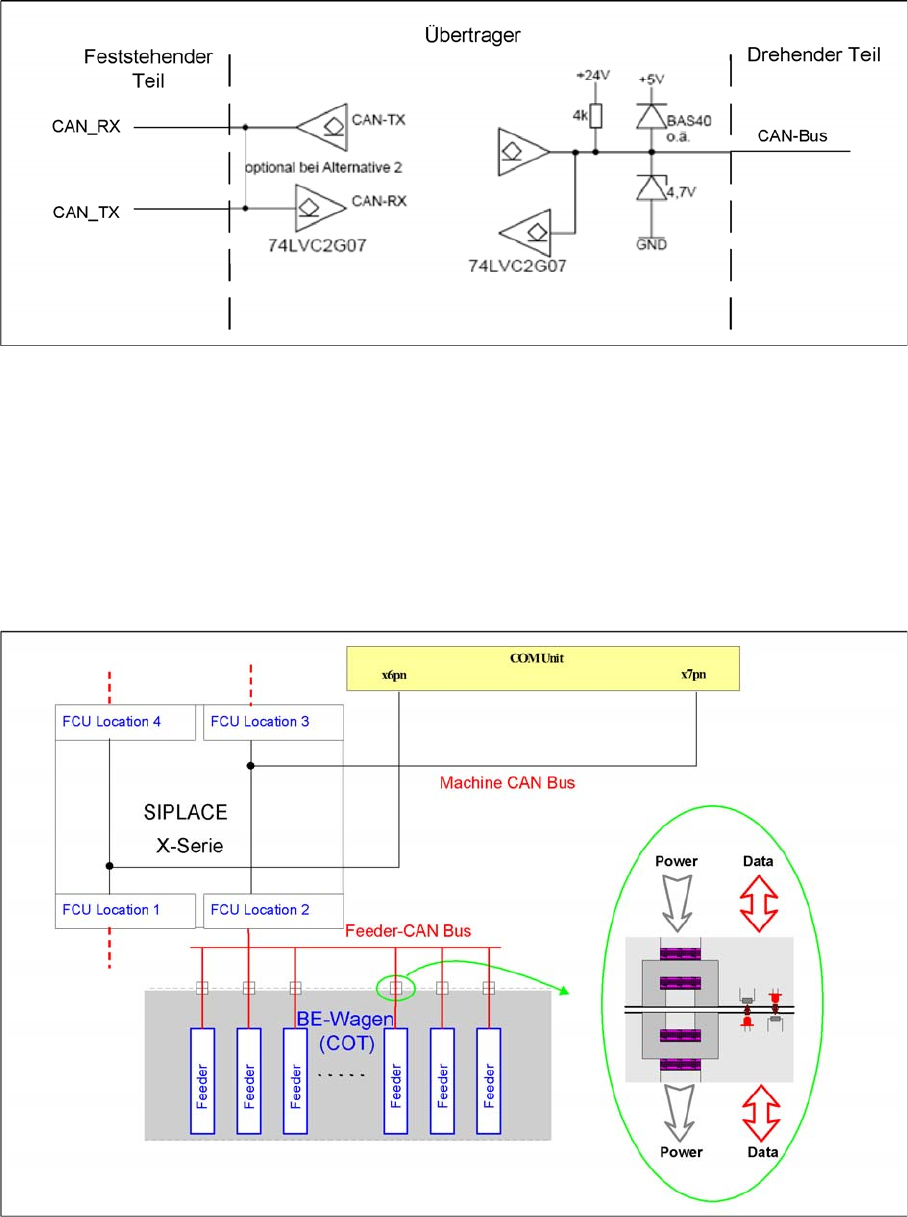
4.3.8.4 Datenübertragung
▪ Die Kommunikation mit den DP-Antrieben (CAN-Bus) erfolgt kontaktlos über eine Sendereinheit (an
der hinteren Abdeckung des CPP-Kopfes) und eine Empfängereinheit (an der Ventilinsel).
▪ Die Kommunikation erfolgt über 2 Kanäle, wobei der Kanal 1 für die Datenversorgung der DP-
Antriebe zuständig ist und der zweite Kanal für die Kommunikation der Z-Unten-Lichtschranke zur
Achskarte (HCU) benutzt wird.
▪ Der Kopf-CAN-Bus ist dabei nicht – wie sonst üblich – als differenzieller CAN-Bus mit den Signalen
CAN_L und CAN_H ausgeführt, sondern auf dem Rotor als 1-Wire-CAN.
Kommunik ation X-Förderer
4.3.9 Kommunikation X-Förderer
Kommunikation X-Feeder
Die Kommunikation zwischen der Feeder-Control-Unit (FCU) und den X-Föderern erfolgt über einen
CAN-Bus. Dieser CAN-Bus ist nur für die Kommunikation zwischen FCU und Föderern zuständig und
wird vom Maschinen CAN-Bus gesteuert.
Die Daten-Energieübertragung zwischen FCU und den Föderern ist kontaktlos.