00196043-05 - SG X und X4I FSE_de.pdf - 第191页
Portal Einstellungen Refer enzlauf X- und Y-Achse (A364) 191 Student Guide SIPLACE X-Serie und X4I FSE ▪ Achsreferenzlauf an d en entsp rechenden Be stückköpfen erfolgrei ch beendet. ▪ 2 Motorphasen we rden an die Leistu…
Portal
Referenzlauf-Abfolge an X- und Y-Achse (A364) Referenzlauf Portal (mit A364)
Student Guide SIPLACE X-Serie und X4I FSE 190
Zur Positionsbestimmung der Achsen werden Inkrementalmaßstäbe (aus Metall), die über dem
Sekundärteil bei der X-Achse und unter dem Sekundärteil bei der Y-Achse aufgeklebt sind, verwendet.
Eine entsprechende Leseeinheit liest die Inkremente, die zur Bestimmung der Position der Achsen und
zur Regelung der Motoren an die Achskarten weitergeleitet werden.
Jede X- und Y-Achse ist an den Enden mit Hardwareanschlägen in Form von Gummipuffern
ausgestattet.
Referenz lauf Portal (mit A364)
6.2 Referenzlauf Portal (mit A364)
Referenzlauf-Abfolge an X- und Y-Achse (A364)
6.2.1 Referenzlauf-Abfolge an X- und Y-Achse (A364)
X- und Y-Kommutierungspunktsuche (A364)
6.2.2 X- und Y-Kommutierungspunktsuche (A364)
Eine Kommutierungspunktsuche für die 3-phasigen AC-Antriebe des Portals startet gleich nachdem der
Referenzlauf der Kopfachsen erfolgreich beendet wurde.
1. Kommutierungspositionssuche beim allerersten Referenzlauf:
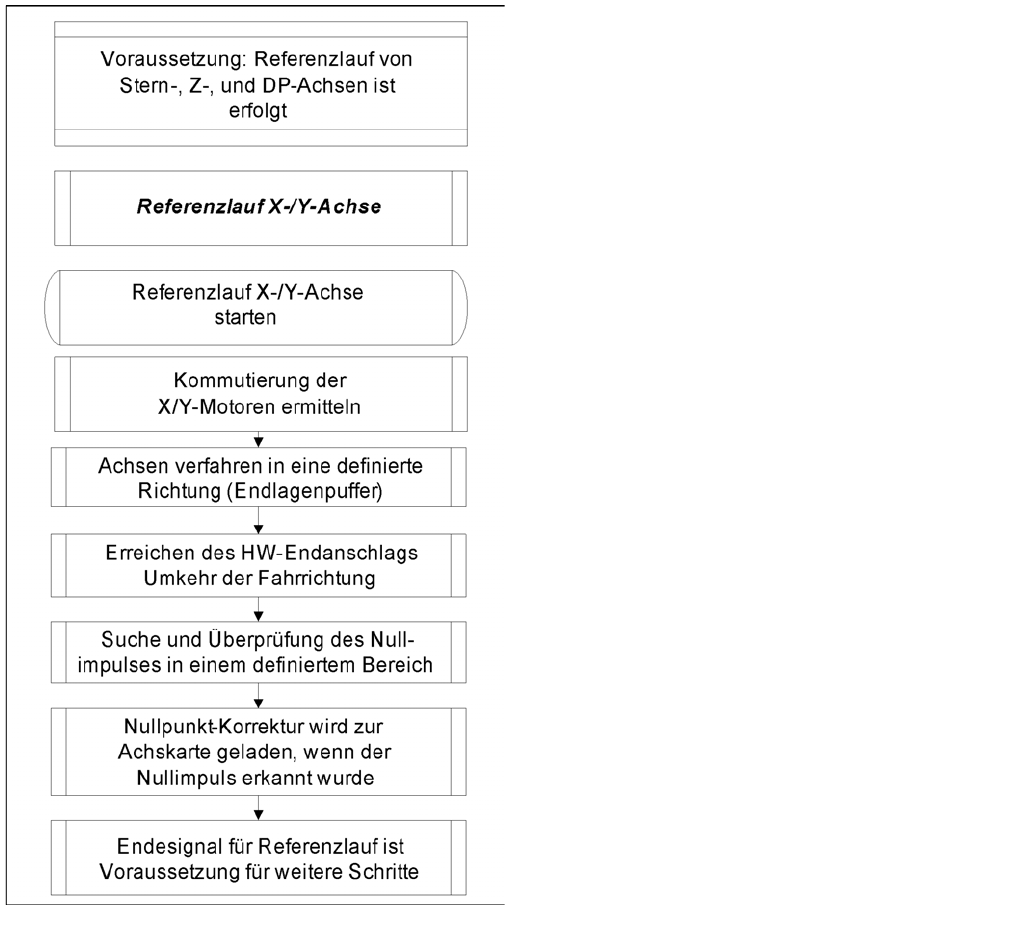
Vorbedingung und Funktion:
Referenzlauf Abfolge
Nach der Kommutierungssuche steht der Motor in
Lageregelung in einer undefinierten Position. Beim
Referieren mittels Puffererkennung
(Hardwareanschläge) fährt die Achse sukzessive gegen
den Puffer. D. h. es werden vom Achscontroller feste
Sollwerte vorgegeben, welche sich dem mechanischen
Anschlag immer weiter nähern.
Mit dieser Annäherungsfunktion wird nach einer
bestimmten Zeit ein Zustand erreicht, in dem die
vorgegebene Zielposition nicht mehr erreicht wird
(Istposition ≠ Sollposition, die Achse steht am
Hardwareanschlag (Puffer)).
Nach einer bestimmten Zeit (ca. 10 ms) und dem
Erreichen eines bestimmten Motorstroms wird die
Verfahrrichtung umgedreht und die Achse sucht in einem
definierten Bereich den Nullimpuls. Dieser muss
innerhalb einer vorgegebenen Verfahrstrecke gefunden
werden. Wurde ein Nullimpuls gefunden, so erfolgt eine
Überprüfung auf weitere Nullimpulse in einem Bereich
von ca. 2,5 mm.
Nach dem Erreichen und Überprüfen des Nullimpulses
steht die Achse in einer definierten Position.
Der Referenzlauf der Hauptachsen wird an allen 4
Portalen gleichzeitig gestartet.
Portal
Einstellungen Referenzlauf X- und Y-Achse (A364)
191 Student Guide SIPLACE X-Serie und X4I FSE
▪ Achsreferenzlauf an den entsprechenden Bestückköpfen erfolgreich beendet.
▪ 2 Motorphasen werden an die Leistungs-Stromversorgung des Servoverstärkers geschaltet.
▪ Der 3-Phasen-AC-Motor bewegt sich bis zur nächsten passenden magnetischen Position.
▪ 2 andere Motor-Phasen werden auf die Servo-Stromversorgung geschaltet und die Achse bewegt
sich weiter.
▪ Diese Schaltvorgänge wiederholen sich mehrmals.
Der Achsreferenzlauf wird fortgesetzt mit der Referenzpositionssuche für das Positionsmesssystem.
Referenzlauf X- und Y-Achse (A364)
6.2.3 Referenzlauf X- und Y-Achse (A364)
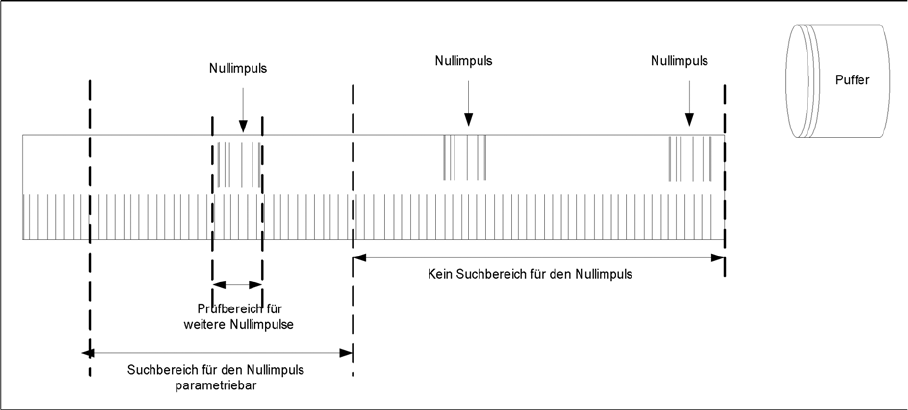
Nullimpuls
Beschreibung Nullimpulssuche:
▪ Voraussetzungen:
– Die Kommutierungspunktsuche ist abgeschlossen.
– Der Motor ist in Lageregelung.
1. Nachdem der Hardwareanschlag erreicht wurde und die Achse in die entgegengesetzte
Verfahrrichtung fährt, ist in einem definiertem Bereich vom Puffer (ca. 25 mm) die Suche nach dem
Nullimpuls nicht erlaubt.
2. Nach dem Überfahren des unerlaubten Bereiches beginnt die Suche. Wird ein Nullimpuls in diesem
Bereich gefunden, so wird in einem Bereich von ca. 2,5 mm nach weiteren Impulsen gesucht. Wird
nur ein Nullimpuls gefunden, dann wird die Endemeldung ausgegeben und der Referenzlauf ist
beendet.
Im Fehlerfall können mehrere oder kein Nullimpuls in dem definierten Bereich auftreten. In diesem
Fall bleibt die Achse mit einer Fehlermeldung stehen.
3. Die Achsen stehen nun in einer definierten Position. Nach dem Finden und Überprüfen des
Nullimpulses wird die Nullpunktkorrektur geladen.
4. Der Referenzlauf der Hauptachsen ist beendet. Der Vakuum- und Höhenreferenzlauf wird gestartet.
Einstellungen
6.3 Einstellungen
Verfahrbereiche und Geschwindigkeitsüberwachung
6.3.1 Verfahrbereiche und Geschwindigkeitsüberwachung
Der Verfahrbereich der X- und Y-Achsen wird während der Maschinenkalibrierung ermittelt.
Portal
Verfahrbereiche und Geschwindigkeitsüberwachung Einstellungen
Student Guide SIPLACE X-Serie und X4I FSE 192
D. h. bei der Kalibrierung der Verfahrbereiche fährt die jeweilige Achse soweit in ihre minimale bzw.
maximale Position bis der vorgegebene Sollwert von der Achskarte nicht erreicht wird. Dann wird davon
ausgegangen, dass der Hardwareendschalter (Puffer) erreicht wurde. In einem Zeitfenster von ca.
10 ms wird dann der größte erreichte Istwert zur Berechnung des Verfahrbereiches herangezogen.
Um einen entsprechenden Sicherheitsabstand vor dem Erreichen des Hardwareendschalters zu
garantieren wird ein bestimmter Weg vom Verfahrbereich abgezogen. Somit ist in einem Fehlerfall ein
rechtzeitiges Bremsen der Achse gewährleistet.
Die X-Achse fährt zum linken und rechten Puffer und misst deren Positionen mit einem
Sicherheitsabstand von 2,0 mm. Zusätzlich wird von der SW ein Wert von 0,5 mm vom maximalen bzw.
minimalen Verfahrweg abgezogen.
Die Y-Achse fährt nur zu ihrer minimalen Position (Portal 1/2) bzw. zu ihrer maximalen Position (Portal
3/4).
Die jeweils gegenüberliegende Position wird berechnet.
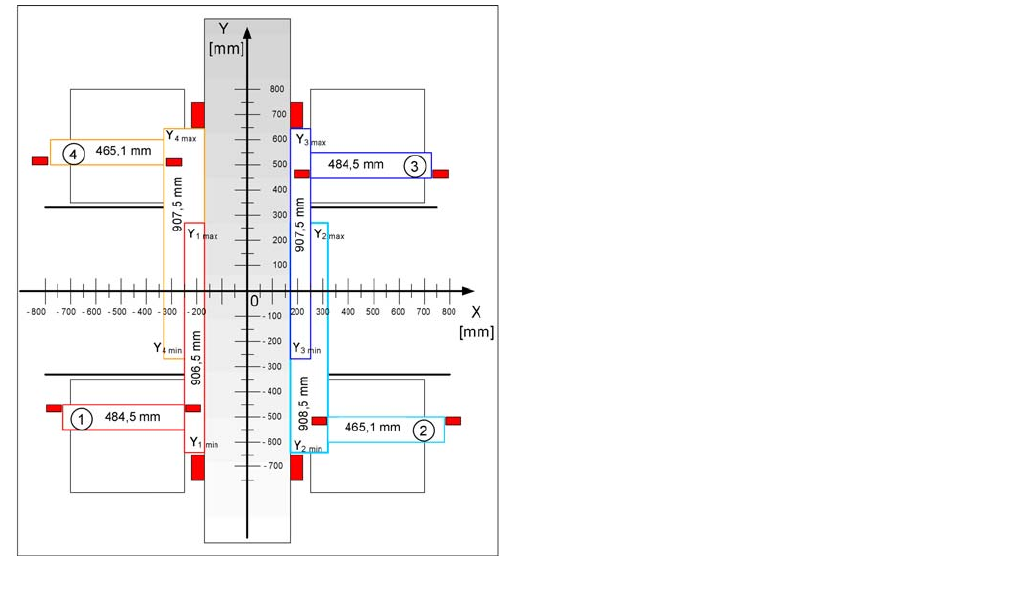
Verfahrbereiche der X- und Y-Achsen (X4I)
Legende
▪ 1 - 4 = Portal 1 bis 4
Das Verfahrbereichsende der X-Achse liegt + oder -
0,5 mm vor dem Softwareendschalter, dieser liegt
wiederum 1,5 mm vor dem Puffer. Ein
Sicherheitsabstand von 2,0 mm zum Puffer reicht aus,
wenn die X-Achse mit überhöhter Geschwindigkeit in
diesen Bereich fährt.
Das Verfahrbereichsende der Y-Achse liegt + oder -
2,0 mm vor dem Softwareendschalter. Die
Verfahrbereichüberwachung der Y-Achsen in einem
Bestückbereich erfolgt in der einen Richtung über
Softwareendschalter und einen Puffer. In die andere
Richtung erfolgt ein ständiger Kommunikationsaustausch
über den SPI-Bus zwischen beiden Achsen und deren
Positionen (siehe Beschreibung Anticrashfunktion).