00196043-05 - SG X und X4I FSE_de.pdf - 第198页
Portal Beschreibungen der Leiterplatten am Portal Einstellungen Student Guide SIPLACE X-Serie und X4I FSE 198 Überprü fen der D IP-Schal ter 6.3.2.4 Überprüfen der DIP-Schalter DIP-Scha lter am K opfinterf ace DIP-Schalt…

Portal
Einstellungen Beschreibungen der Leiterplatten am Portal
197 Student Guide SIPLACE X-Serie und X4I FSE
CAN-Prozessorboard 16-Bit
6.3.2.3 CAN-Prozessorboard 16-Bit
Die 16-Bit-CAN-Prozessoren werden für unterschiedliche Funktionen auf folgenden Baugruppen
eingesetzt: (siehe auch Kapitel Kommunikation und Steuerung)
▪ Visionboard: Kommunikation und Steuerung via CAN-Bus zum Stationsrechner.
▪ Kopfplatine (C500), wenn ein C&P-Kopf konfiguriert ist: Steuerung der Kopfabläufe und des
Vakuumgenerators
Beschreibung der 7-Segmentanzeige (im Normalbetrieb blinkt der Punkt "."):
▪ Nach den Einschalten erscheint eine "0" im Display
▪ Anzeige "b" --> BIOS wurde gestartet.
▪ Anzeige blinkt abwechselnd "b" und "." --> keine Applikation vorhanden bzw. konnte nicht gestartet
werden.
▪ Anzeige "-I" und "I-" --> Applikation wurde geladen und jetzt gestartet.
▪ Der Punkt "." auf der Anzeige blinkt. --> Der Prozessor ist hochgelaufen und bereit.
HINWEIS
Die DIP-Schalterkonfiguration für die Portalkonfigurierung ist im "6.3.2.4 Überprüfen der DIP-
Schalter" [ ➙ 198] beschrieben.
16-Bit-Prozessor (TQM-Modul)
Legende
1. 7-Segmentanzeige
2. LED
Die LED ist rot wenn Sie einen manuellen RESET
des Prozessors durchführen
3. 16-Bit-Prozessor
Portal
Beschreibungen der Leiterplatten am Portal Einstellungen
Student Guide SIPLACE X-Serie und X4I FSE 198
Überprüfen der D IP-Schal ter
6.3.2.4 Überprüfen der DIP-Schalter
DIP-Scha lter am Kopfinterf ace
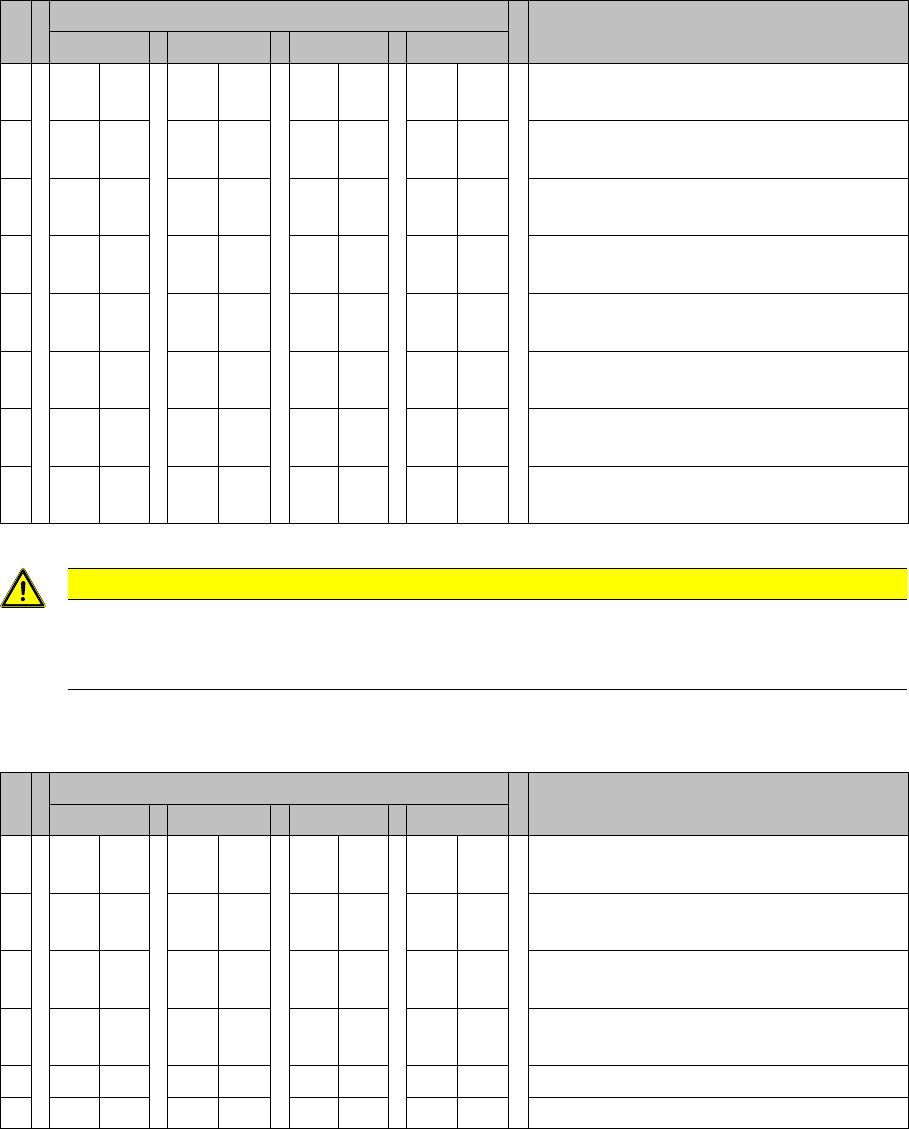
DIP-Schalter am Kopfinterface
* Je nach Maschinentyp sind nicht alle Portale verfügbar.
DIP-Scha lter am Vision-Bo ard (Digital-Version 02)
DIP-Schalter am Vision-Board (Digital-Version 02)
* Je nach Maschinentyp sind nicht alle Portale verfügbar.
S Portal* Anmerkung
1 2 3 4
1 OF
F
ON OF
F
ON P0 - Adress-Schalter 1 --> Portal
2 OF
F
OF
F
ON ON P1 - Adress-Schalter 2 --> Portal
3 ON ON ON ON CAN R - Schalter Abschlusswiderstand
CAN-Bus (für TwinHead immer OFF.)
4 OF
F
OF
F
OF
F
OF
F
Boot - CAN-Prozessor 16-Bit
5 OF
F
OF
F
OF
F
OF
F
Reset – CAN-Prozessor 16-Bit
6 OF
F
OF
F
OF
F
OF
F
C0 - Adressen Schalter CAN-Bus
7 OF
F
OF
F
OF
F
OF
F
C1 – Adressen Schalter CAN-Bus
8 OF
F
OF
F
OF
F
OF
F
WPE - Schreibschutz aktiviert z. Z
ausgeschaltet (Write protect enable)
VORSICHT
Schalter 3 (Gilt nicht für X4I-Maschinen)
Bei Head Modularity ist darauf zu achten, dass der CAN-Abschlusswiderstand richtig gesetzt
wird. D. h. Schalter 3 wird bei C&P auf ON, bei TwinHead auf OFF gesetzt.
S Portal* Anmerkung
1 2 3 4
1 OF
F
OF
F
OF
F
OF
F
Reset - CAN-Prozessor
2 OF
F
ON OF
F
ON PID0 Adress-Schalter 1 -> Portal
3 OF
F
OF
F
ON ON PID1 Adress Schalter 2 -> Portal
4 OF
F
OF
F
OF
F
OF
F
CAN R - Schalter für den Abschlusswider-
stand am CAN-Bus
5 ON ON ON ON Speed: ON = 1 Mbit/s, OFF = 500 Kbit/s
6 ON ON ON ON CAN ID - für X-Maschine ON
Portal
Einstellungen Achskarte A364 Anticrash-Funktion
199 Student Guide SIPLACE X-Serie und X4I FSE
Achskarte A364 Anticrash-Funktion
6.3.3 Achskarte A364 Anticrash-Funktion
Anticrash-Fun ktion auf der A 364
6.3.3.1 Anticrash-Funktion auf der A364
▪ Die Anticrash-Funktion wird nicht mehr über die Anticrash-Platine realisiert, sondern über die
Software der A364 (Applikation 1). Somit fallen die BEROs für die Verfahrbereichsüberwachung und
der Sensor für die Überwachung des Portalabstandes weg.
▪ Aufgaben:
– Überwachung der Verfahrbereiche X- und Y-Achse
Auswertung der Ist-Position der jeweiligen Achse in Richtung der Puffer, abhängig von der
Geschwindigkeit.
– Überwachung des Abstandes beider Y-Achsen in einem Bestückbereich
Auswertung der Ist-Position des eigenen Portals und des Partnerportals bei der Portalcrash-
Überwachung.
– Zählfehlerüberwachung der Portalachse
Überwachung der eingehenden Zählimpulse (Flankenüberwachung), in Abhängigkeit von der
Zeit.
Ablauf Anticrash-Überwachung auf der A364
6.3.3.2 Ablauf Anticrash-Überwachung auf der A364
Die Aktivierung der Anticrash-Funktion erfolgt nachdem die Achsen X/Y referiert wurden. Beim
erstmaligen Referenzieren der Portalachsen ist die Anticrash-Überwachung nicht aktiv, was durch die
geringe Verfahrgeschwindigkeit unkritisch ist.
Danach wird das Bit für die Anticrash-Überwachung gesetzt und über den SPI-Bus erfolgt dann eine
ständige Kommunikation über die Ist-Position des jeweiligen Partnerportals.
Folgende Informationen werden zwischen den Y-Achsen ausgetauscht:
▪ Ist-Position und Geschwindigkeit des eigenen Portals
▪ Statusinformationen (Referierzustand, Zustand der Anticrash-Überwachung).
Fehler "Portalcrash"
6.3.3.3 Fehler "Portalcrash"
Die Bestimmung des Fehlers “Portalcrash” erfolgt aus der Positions- und der Geschwindigkeitsdifferenz
beider Achsen. Der Fehler Portalcrash wird über die Achskarte und über den CAN-Bus gemeldet. Bei
beiden Achsen wird der Servo freigeschaltet und es müssen beide erneut referiert werden.
Zählfehler
6.3.3.4 Zählfehler
Wird über die Achskarte ein "Fataler Zählfehler" erkannt, wird die betroffene Achse freigeschaltet und
die Anticrash-Funktion deaktiviert. Dies bekommt die andere Achse über die Statusinformation mit und
deaktiviert die Anticrash-Funktion. Die freigeschaltete Achse muss neu referiert werden.
Danach wird die Anticrash-Funktion für beide Achsen wieder aktiviert.