00196043-05 - SG X und X4I FSE_de.pdf - 第239页
C&P20A Abhol- und Bestückzyklus am C&P20A C&P20A in Grundstellung 0° 239 Student Guide SIPLACE X-Serie und X4I FSE C&P20A i n Grundstellung 0 ° 7.4.2 C&P20A in Grundstellung 0° LP-Lagee rkennung 7.4.3…
C&P20A
Messung Z-Achsenpositionen für die BE-Erkennung durch den BE-Sensor Abhol- und Bestückzyklus am C&P20A
Student Guide SIPLACE X-Serie und X4I FSE 238
Messung Z-Achsenpositionen für die BE-Erkennung durch den BE-Sensor
7.3.8 Messung Z-Achsenpositionen für die BE-Erkennung durch den BE-Sensor
Während die Z-Achse nach unten fährt, unterbricht die Pipette den Laserstrahl des BE-Sensors. In
diesem Moment wird die Achsposition ausgelesen und später zur Berechnung der BE-Höhe und BE-
Anwesenheit benutzt. Bei der Aufwärtsbewegung der Z-Achse wird der unterbrochene Laserstrahl frei
und die Achsposition nochmals ausgelesen. So kann die BE-Anwesenheit im Bestückprozess durch die
programmierte BE-Höhe (SIPLACE Pro) und der ermittelten Pipettenlänge während des
Höhenreferenzlaufs über den Positionszähler der Z-Achse berechnet werden.
Abhol- und Bestü ckzyklus am C&P20A
7.4 Abhol- und Bestückzyklus am C&P20A
Arbeitspositionen am Bestückkopf
7.4.1 Arbeitspositionen am Bestückkopf
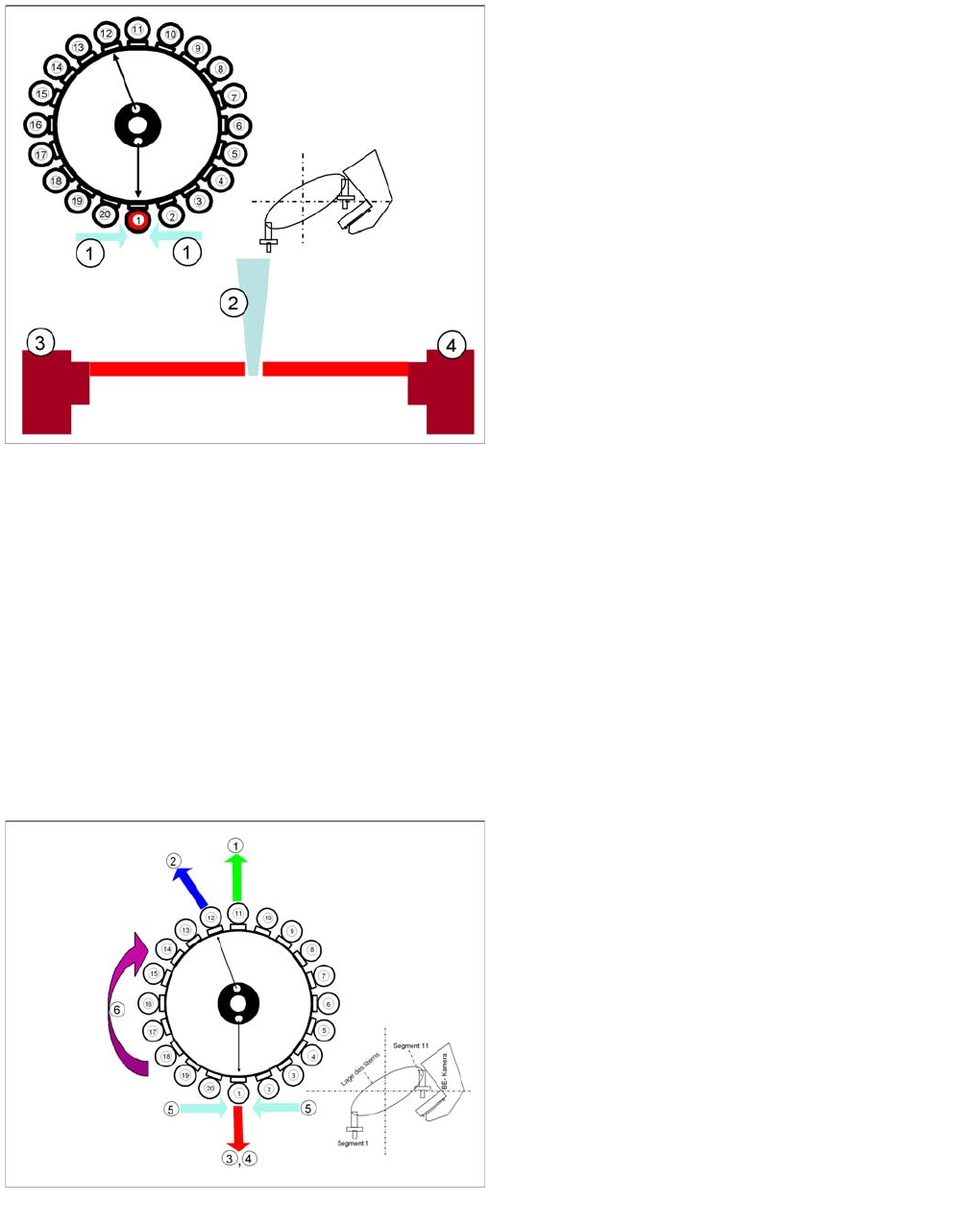
Messung der Pipettenlänge für die
Bauelementeerkennung während des Referenzlaufs
Legende
1. BE-Sensor
2. Pipette
3. Empfänger
4. Sender
Der BE-Sensor ermittelt während des
Höhenreferenzlaufs die Z-Achsenositionen jedes
einzelnen Segments für die An- bzw. Abwesenheit von
Bauelementen in der Bestück-/Abholposition. Während
des Bestückprozesses kann der BE-Sensor auch
verschmutzte Pipetten erkennen.
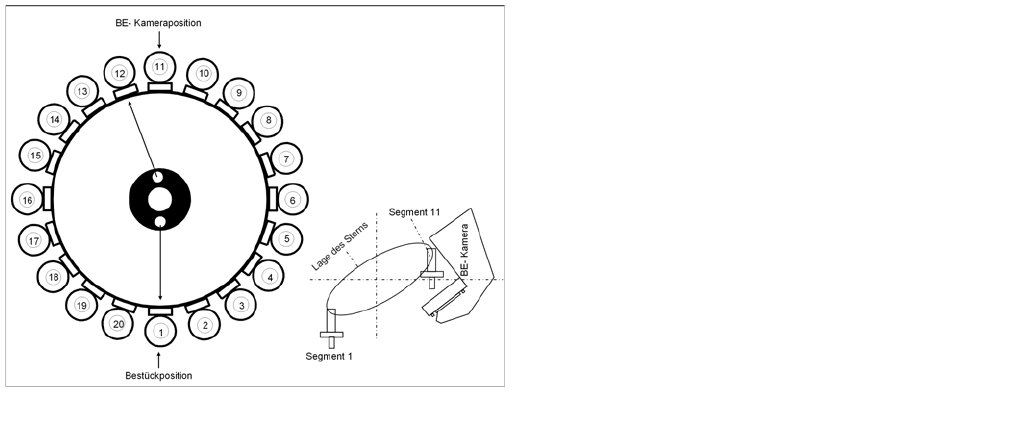
Arbeitspositionen am Bestückkopf
Legende
1. Optische Zentrierung (BE-Kamera)
2. Vakuummessung Haltekreis
3. Vakuummessung Bestückkreis
4. Abhol- / Bestückstation und Abwurfposition
5. Position BE-Sensor
6. Arbeitsrichtung
C&P20A
Abhol- und Bestückzyklus am C&P20A C&P20A in Grundstellung 0°
239 Student Guide SIPLACE X-Serie und X4I FSE
C&P20A i n Grundstellung 0°
7.4.2 C&P20A in Grundstellung 0°
LP-Lagee rkennung
7.4.3 LP-Lageerkennung
Wir unterscheiden zwischen einfacher Lageerkennung und doppelter Lageerkennung.
LP-Lageerkennung (einfache Lageerkennung)
Die Leiterplatten-Lageerkennung dient dazu, die genaue Position der Leiterplatte in der Maschine
(Transport --> Bestückbereich) zu bestimmen.
Die LP-Lagerkennung wird mit dem Portal 4 für den Bestückbereich 1 und mit dem Portal 2 im
Bestückbereich 2 durchgeführt.
Es sollten sich mindestens zwei Passmarken auf der Leiterplatte befinden. Mit diesen zwei Passmarken
kann die X/Y-Position und der Drehwinkel der LP im Transport festgestellt werden.
Die Passmarken sollten nicht auf einer Linie liegen.
Es können max. 3 Passmarken für die Lageerkennung programmiert werden. Mit dieser 3. Passmarke
kann zusätzlich zur Positionsbestimmung der LP im Transportsystem auch der Verzug innerhalb der
Leiterplatte (gestaucht, gestreckt) bestimmt und korrigiert werden.
Doppelte Lageerkennung (nur bei Alternating mode)
Die doppelte Lageerkennung ist notwendig um die Bestückgenauigkeit zu gewährleisten. Jedes Material
verändert sich in Abhängigkeit der Temperatur, so auch die Portale in der Maschine.
Die doppelte Lageerkennung wird mit Portal 1 im Bestückbereich 1 und mit Portal 3 im Bestückbereich
2 durchgeführt.
Bei der doppelten Lageerkennung berechnet sich das Portal 1/3 mit den Marken-
Lageerkennungswerten von Portal 2/4 den Bestück-Offset für Portal 1/3. Je nach Anordnung der Marken
auf der Leiterplatte werden 2 oder 3 Passmarken für die doppelte Lageerkennung benutzt.
Die Marken für die doppelte Lageerkennung werden so gewählt, dass eine möglichst genaue
Berechnung stattfinden kann.
Temperaturkompensation
Eine weitere Maßnahme um die Bestückgenauigkeit zu gewährleisten ist die Temperaturkompensation
mit Hilfe der Sensoren an der Kopfplatte. An der Kopfplatte sind zwei Temperatursensoren angebracht,
deren Temperaturwerte ständig über ein eigenes Bussystem abgefragt werden.
Die Software berechnet an Hand dieser Temperaturwerte einen Offsetwert, der zum Kopf-Offset addiert
wird.
▪ Kopf-Offset SW60x ist der Abstand LP <--> BE Kamera
C&P20A in Grundstellung 0°
Sternposition
▪ Digits: 10
▪ Winkel: 0°
1° entspricht 1000 Digits
Durch die Rückholeinheit der Z-Achse ist Segment 1 vom
Herunterfallen gesichert.
C&P20A
LP-Lageerkennung Abhol- und Bestückzyklus am C&P20A
Student Guide SIPLACE X-Serie und X4I FSE 240
▪ Kopf-Offset SW70x ist der Abstand LP Kamera <--> Pipettenspitze
▪ Der Temperatur-Referenzwert ist die Temperatur während der letzte Kalibrierung der Maschine.
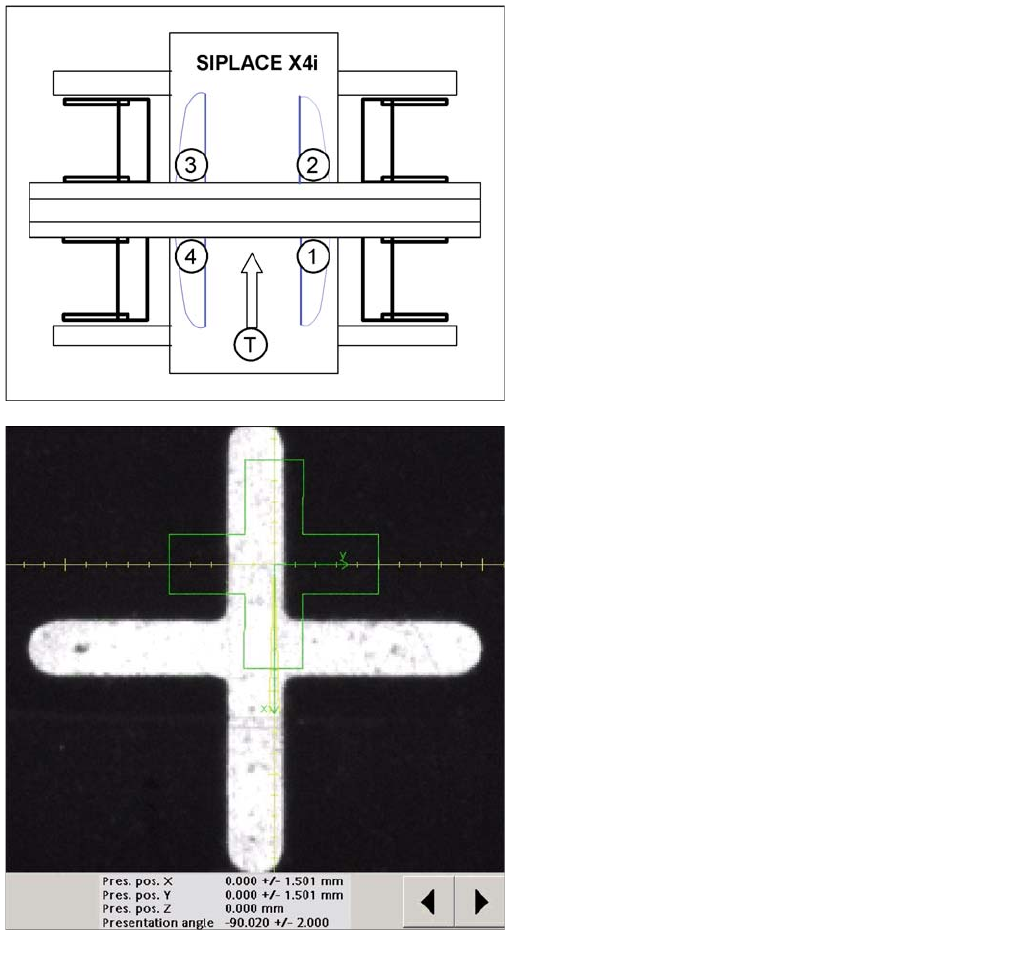
SIPLACE X4I:
▪ Portal 4 – Lageerkennung mit max. 3 Marken
▪ Portal 2 – Lageerkennung mit 2 Marken
▪ Portal 1 und Portal 3 – doppelte Lageerkennung
Legende
▪ 1: Portal 1
▪ 2: Portal 2
▪ 3: Portal 3
▪ 4: Portal 4
▪ T: Transportrichtung
LP-Lageerkennungsfahrt zur Sollposition der Leiterplatte
An dieser Sollposition wird eine Passmarke erwartet. Die
LP-Kamera wird aus der Warteposition zu dieser
Passmarken-Position bewegt.
▪ Die LP-Lageerkennung wird durchgeführt, bevor das
1. Bauelement aufgenommen wird.
▪ Die Portalachsen bewegen die LP-Kamera zu der
theoretischen Passmarken-Position. Die Kamera
macht eine Aufnahme der 1. Passmarke. Das
Visionsystem errechnet die Mittenposition.