00196043-05 - SG X und X4I FSE_de.pdf - 第241页
C&P20A Abhol- und Bestückzyklus am C&P20A LP-Lageerkennung - Zentr ierun g der LP-Passmarken 241 Student Guide SIPLACE X-Serie und X4I FSE LP-Lagee rkennung - Zentrie rung der LP-Passm arken 7.4.4 LP-Lageerkennun…
C&P20A
LP-Lageerkennung Abhol- und Bestückzyklus am C&P20A
Student Guide SIPLACE X-Serie und X4I FSE 240
▪ Kopf-Offset SW70x ist der Abstand LP Kamera <--> Pipettenspitze
▪ Der Temperatur-Referenzwert ist die Temperatur während der letzte Kalibrierung der Maschine.
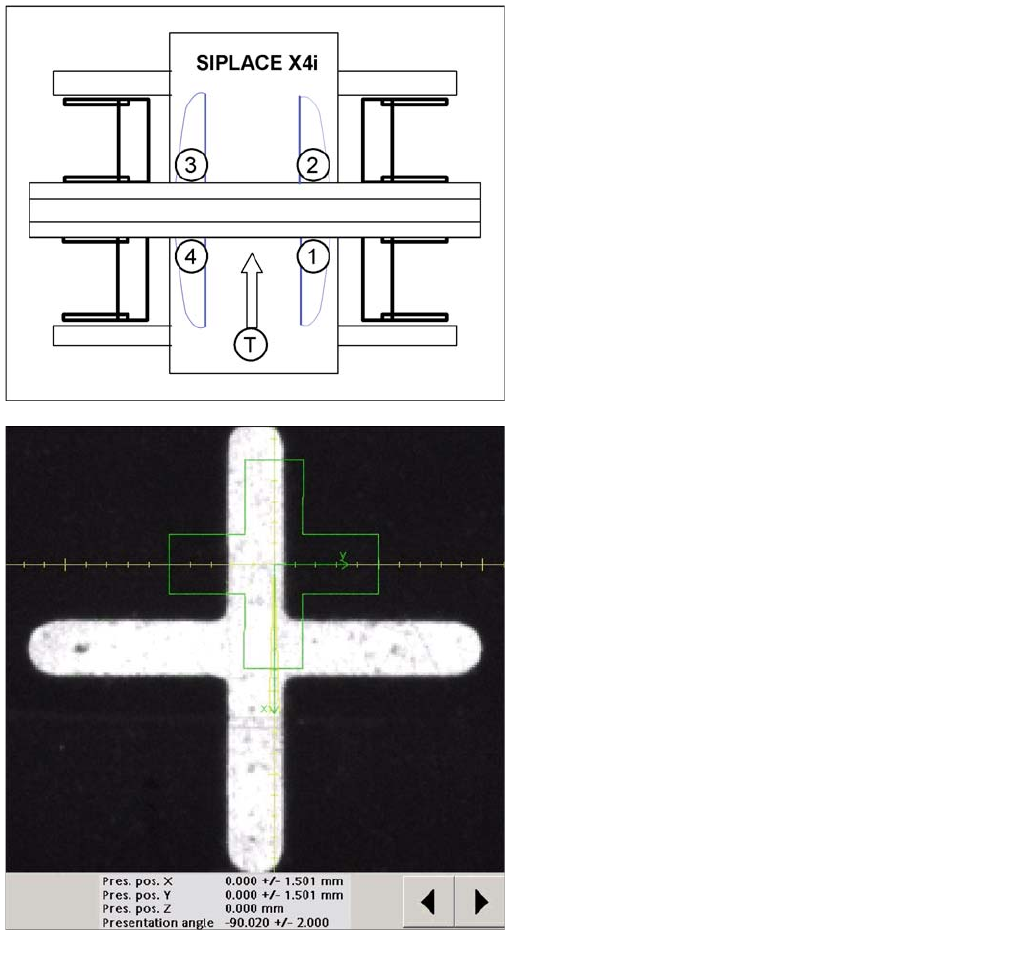
SIPLACE X4I:
▪ Portal 4 – Lageerkennung mit max. 3 Marken
▪ Portal 2 – Lageerkennung mit 2 Marken
▪ Portal 1 und Portal 3 – doppelte Lageerkennung
Legende
▪ 1: Portal 1
▪ 2: Portal 2
▪ 3: Portal 3
▪ 4: Portal 4
▪ T: Transportrichtung
LP-Lageerkennungsfahrt zur Sollposition der Leiterplatte
An dieser Sollposition wird eine Passmarke erwartet. Die
LP-Kamera wird aus der Warteposition zu dieser
Passmarken-Position bewegt.
▪ Die LP-Lageerkennung wird durchgeführt, bevor das
1. Bauelement aufgenommen wird.
▪ Die Portalachsen bewegen die LP-Kamera zu der
theoretischen Passmarken-Position. Die Kamera
macht eine Aufnahme der 1. Passmarke. Das
Visionsystem errechnet die Mittenposition.
C&P20A
Abhol- und Bestückzyklus am C&P20A LP-Lageerkennung - Zentrierung der LP-Passmarken
241 Student Guide SIPLACE X-Serie und X4I FSE
LP-Lagee rkennung - Zentrie rung der LP-Passm arken
7.4.4 LP-Lageerkennung - Zentrierung der LP-Passmarken
Vorbereiten von Pipette 1 bis 20 zum Abholwinkel (0° oder 90°)
7.4.5 Vorbereiten von Pipette 1 bis 20 zum Abholwinkel (0° oder 90°)
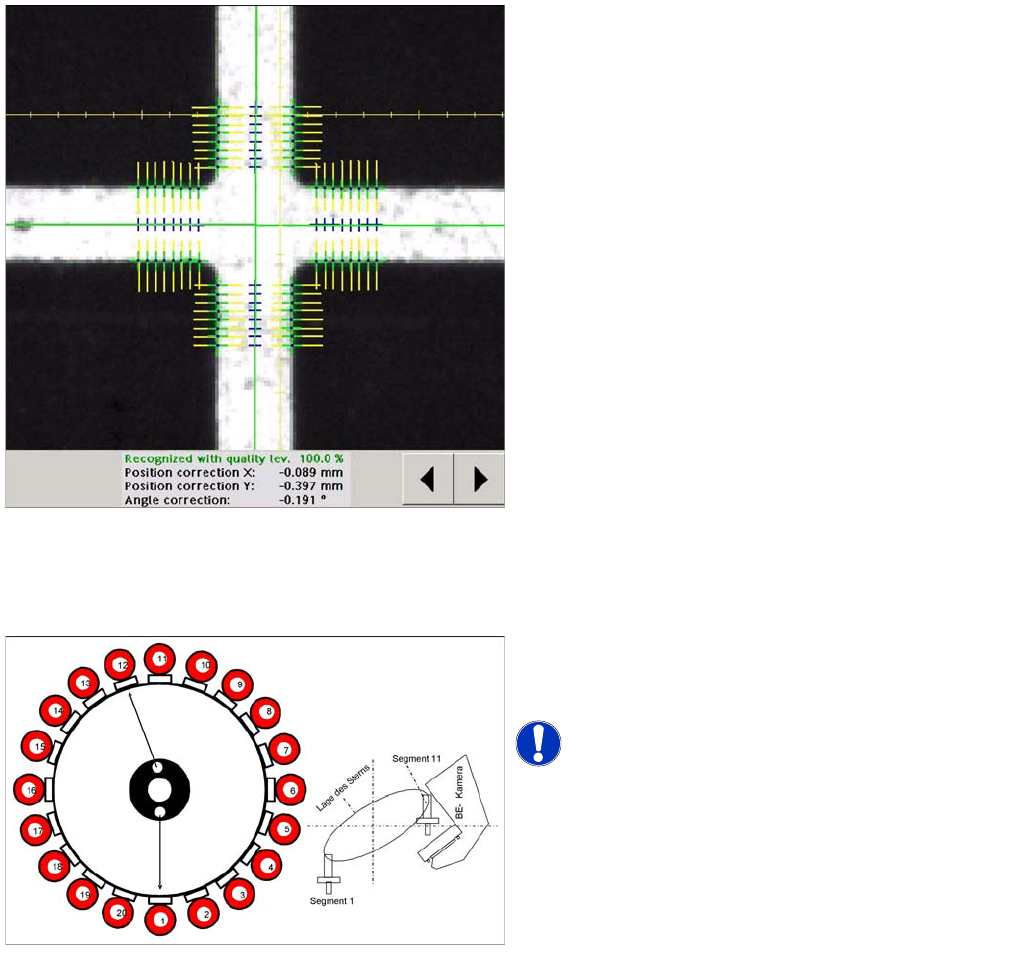
LP-Lageerkennung – Zentrierung der LP-Passmarken
Die zentrierte Passmarke definiert jetzt die tatsächliche
Position der Leiterplatte.
▪ Die Kamera macht eine Aufnahme der 2. Passmarke
und das Visionsystem errechnet die Mittenposition
dieses Bildes.
▪ Die 2. Berechnung ist die Abweichung zwischen der
Soll- und der errechneten Passmarken-Position.
▪ Alle LP-Passmarken werden optisch mit diesem
Verfahren zentriert.
▪ Diese Daten werden an die Maschinensteuerung
geschickt.
▪ Korrigierte Werte werden für die X-, Y- und die
Winkelposition der Leiterplatte errechnet.
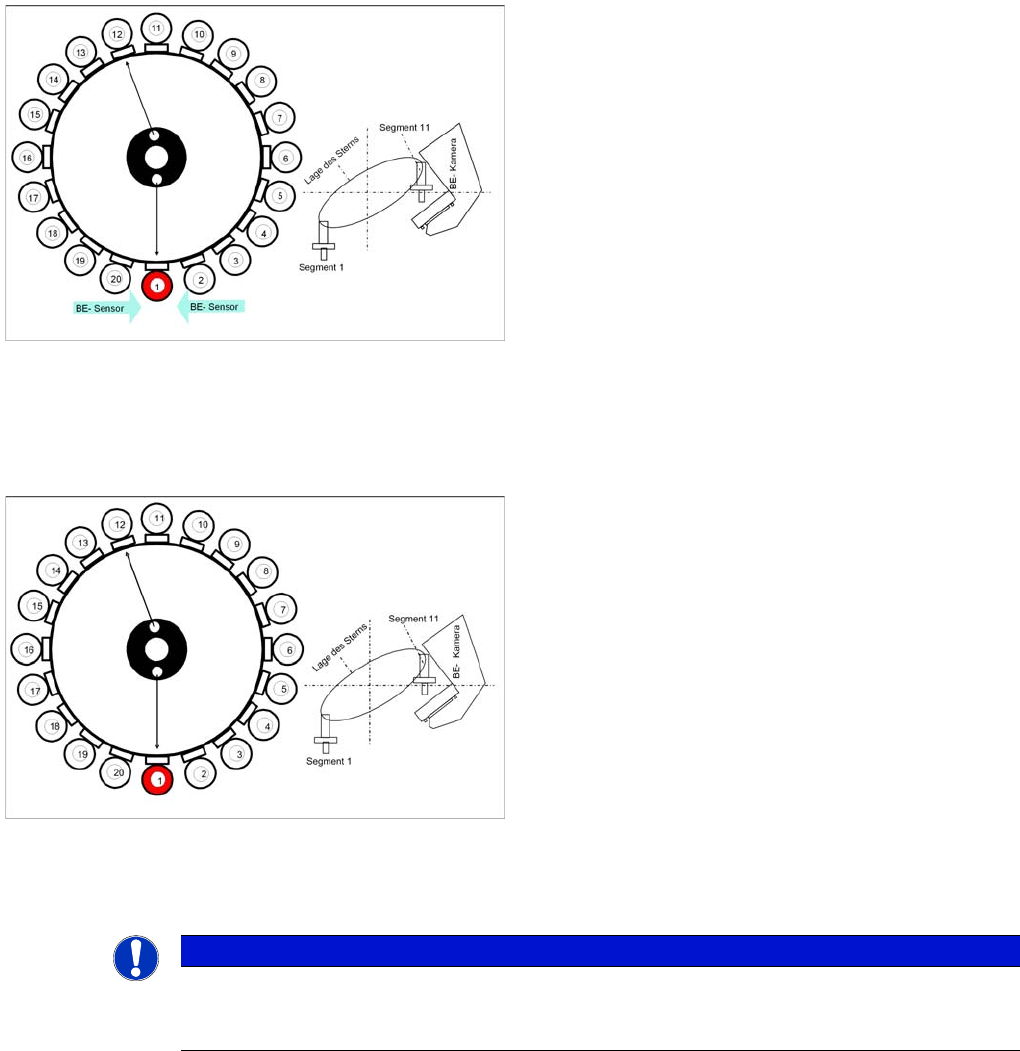
▪ Jetzt bewegen die Portalachsen den Bestückkopf zur
ersten Abholposition.
▪ Beim C&P20A werden alle Segmente nacheinander,
von Segment 1 angefangen bis Segment 20, auf den
gewünschten Abholwinkel 0° oder 90° gedreht.
HINWEIS! Jedes Segment hat seinen eigenen
DP-Antrieb
C&P20A
Pipettenlänge für BE-Erkennung überprüfen Abhol- und Bestückzyklus am C&P20A
Student Guide SIPLACE X-Serie und X4I FSE 242
Pipettenlänge für BE-Erkennung überprüfen
7.4.6 Pipettenlänge für BE-Erkennung überprüfen
Abholen des erste n Bauelementes
7.4.7 Abholen des ersten Bauelementes
Die verbleibenden Pipetten nehmen jetzt mit Weiterdrehen des Sterns die Bauelemente auf und drehen
diese in die richtige Bestückposition/Winkel, bevor diese unter der BE-Kamera sind.
Überprüfen der Pipettenlänge ("BE-Erkennung vor
Bestücken durch den BE-Sensor")
Messung durch BE-Sensor in Abholposition:
▪ Vakuummessung: ’Segment offen’-Wert
▪ Der BE-Sensor misst die Länge der Pipette. Diese
gemessene Länge vor dem Abholen wird mit der
Referenzlänge der Pipette verglichen.
▪ Wird ein Längenunterschied von -0,15 mm oder
+0,1 mm festgestellt, bewegen die Portalachsen den
Bestückkopf in die Serviceposition um die Pipette zu
tauschen.
▪ Die Messung erfolgt "On the Fly" in der Abhol-/
Bestückposition des Sterns
Abholen des ersten Bauelementes
Sternposition 0°
▪ Visionsystem: Keine Aktion
▪ Abhol-/Bestückstation: Abholen des ersten
Bauelementes
▪ Z-Achse abwärts
▪ Vakuumprüfung BE angesaugt
▪ BE-Sensor: Direkte Messung nach Abholen des
ersten Bauelementes (für alle weiteren Segmente gilt
entsprechendes)
▪ Vakuumcheck nach Abholen: Prüfen der Haltekraft
des BEs an der Pipette.
HINWEIS
Alle Vakuummessungen während des Bestückprozesses werden im Hintergrund durchgeführt
und Erzeugen keine Fehlermeldungen. Die Fehlermeldungen über fehlendes BE an der Pipette
usw. werden ausschließlich über den BE-Sensor erzeugt.