00196043-05 - SG X und X4I FSE_de.pdf - 第283页
Collect-, Pick- und Place-Kopf (CPP) Übersicht Teileübersicht 283 Student Guide SIPLACE X-Serie und X4I FSE Rückholein heit 8.2.7.4 Rückholeinheit Funktio nsweise d er Rückholeinheit Funktionsweise der Rückholeinheit Im …
Collect-, Pick- und Place-Kopf (CPP)
Teileübersicht Übersicht
Student Guide SIPLACE X-Serie und X4I FSE 282
▪ Die Rückholeinheit ist in den Rahmen der Z-Achse integriert und soll die Z-Achse vor Beschädigung
schützen, wenn die Stromversorgung unterbrochen ist.
▪ Frontplatte mit Z-Antrieb, Rachen, Laufring und Rückholeinheit bilden ein Ersatzteil. Es ist nicht
möglich, Teile der Frontplatte auszutauschen, da exakte Einstellungen nötig sind, die nur
werksseitig vorgenommen werden können.
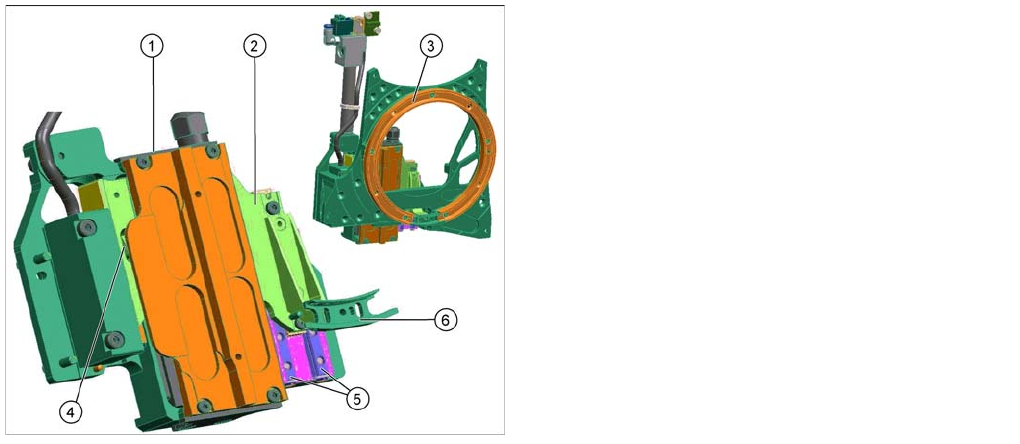
Funktionsweise des Z Antriebs
Funktionsweise des Z Antriebs
▪ Der Z-Antrieb ist ein 3-Phasen-Linearmotor. Der bewegliche Teil (Magnete) wird auf der einen Seite
über zwei Linearführungen und auf der anderen Seite durch eine Stützrolle geführt.
▪ Auf der Seite der Stützrolle befindet sich das inkrementale Messsystem.
▪ Jeder Z-Antrieb besitzt ein EEPROM, in dem folgende Daten gespeichert werden:
– Fertigungsdaten (Hersteller, Seriennummer, ...)
– Betriebsdaten (Fehler, Fahrzyklen, ...)
– Maschinendaten (Motordaten, Verfahrprofile, Nullpunktkorrektur, max. und min. Position)
▪ Das Messsystem hat eine Auflösung von 0,5 µm. Der Nullimpuls befindet sich ca. 2 mm unter dem
oberen Anschlag.
▪ Servoverstärker für die Z-Achse SDS120/1.5Z2 bei Ansteuerung mit A364. Bei den SX- Maschinen
erfolgt die Steuerung der Achsen über die HCU (Head Control Unit)
Legende
1. Z-Motor Primärteil
2. Z-Motor Sekundärteil
3. Laufring
4. Stützrolle
5. Linearführung Z-Achse
6. Rachen
Collect-, Pick- und Place-Kopf (CPP)
Übersicht Teileübersicht
283 Student Guide SIPLACE X-Serie und X4I FSE
Rückholeinheit
8.2.7.4 Rückholeinheit
Funktionsweise d er Rückholeinheit
Funktionsweise der Rückholeinheit
Im stromlosen Zustand ist die Lagerreibung der Z-Achse nicht ausreichend, um die Achse gegen
Herunterfallen zu sichern. Um bei Verschieben des Portals auch bei ausgeschalteter Maschine die Z-
Achse zu schützen, wurde ein pneumatisches Rückholsystem eingebaut. Diese Rückholeinheit hält die
Z-Achse in stromlosem Zustand in der sicheren oberen Position.
Bauelemente-Sensor
8.2.7.5 Bauelemente-Sensor
Jeder CPP-Kopf ist standardmäßig mit einem BE-Sensor in der Abhol-/Bestückposition ausgerüstet.
Mit Hilfe des BE-Sensors wird die Anwesenheit und/oder die Bauteilhöhe nach dem Abholen und vor
dem Bestücken kontrolliert.
Der BE Sensor ist mit zwei Schrauben am Kopf montiert und kann als komplette Einheit im Servicefall
getauscht werden.
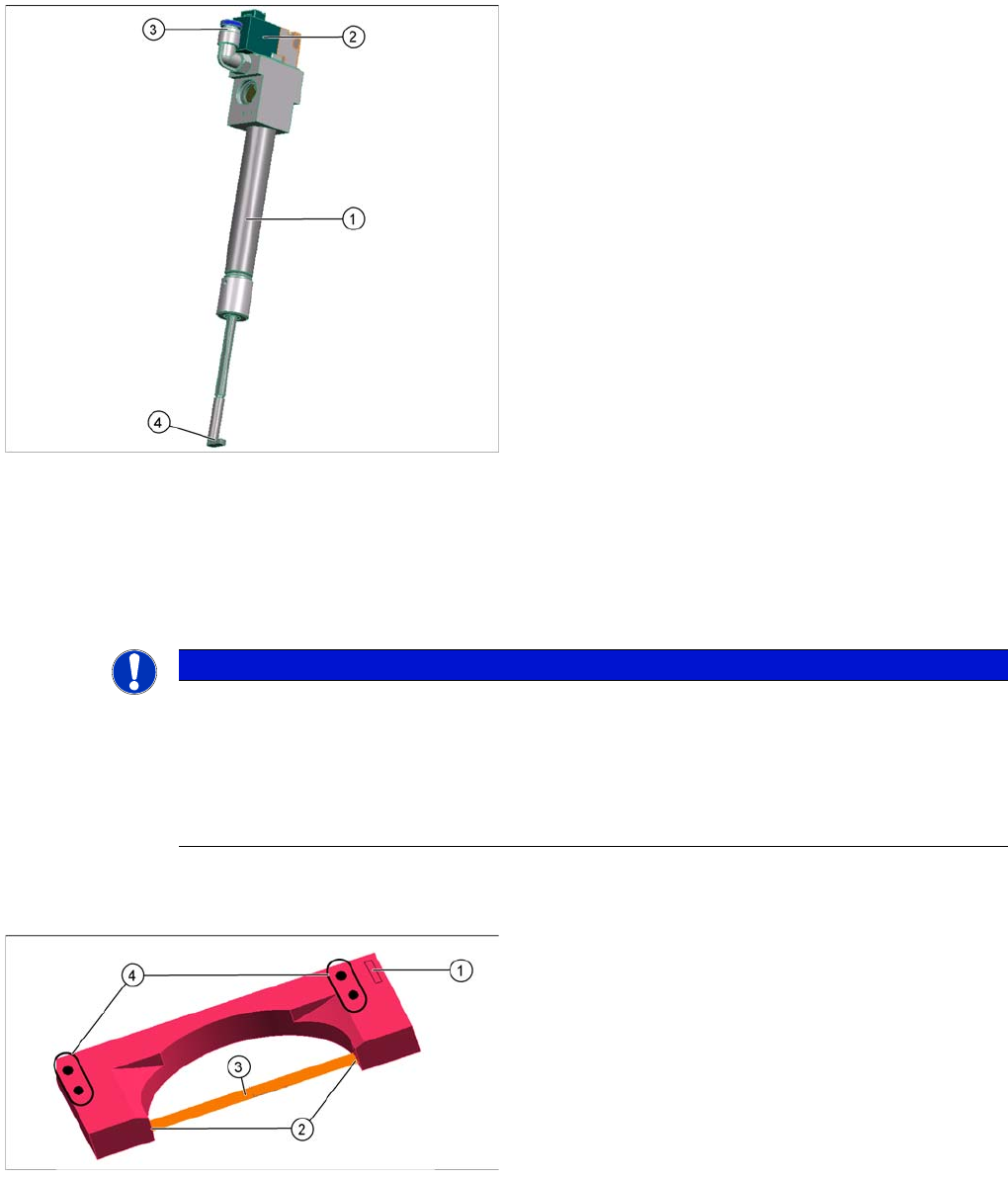
Legende
1. Pneumatikzylinder
2. Magnetventil
3. Druckluftanschluss
4. Mitnehmer für Z-Achse
Die Rückholeinheit ist fest an der Z-Achse montiert.
Diese Rückholeinheit hält die Z-Achse im stromlosen
Zustand in der sicheren oberen Position. Dadurch wird
sichergestellt dass der Bestückkopf bei ausgeschalteter
Maschine oder bei Stromausfall nicht beschädigt wird.
Die Rückholeinheit ist kein Ersatzteil und kann nur mit der
kompletten Frontplatte des Kopfes getauscht werden.
HINWEIS
Die Steuerung der Z-Achse ist so ausgeführt, dass bei Ausfall der Energieversorgung der
Maschine genügend Energie auf der Servobaugruppe und Achskarte des Z-Motors
zwischengespeichert ist, um die Z-Achse in die obere Position zu fahren.
Die Erkennung des Netzausfalles erfolgt über ein "Power fail"-Signal. Das "Power fail"-Signal
aktiviert die entsprechende Funktion (Hochfahren der Z-Achse und Aktivieren der
Rückholeinheit) auf der Achskarte.
Legende
1. Stecker zur Energie-/Datenversorgung
2. Sender- und Empfängereinheit
3. Laserstrahl
4. Befestigung am Kopfgehäuse
(2x Zentrierstifte, 2x Schrauben)
Collect-, Pick- und Place-Kopf (CPP)
Teileübersicht Übersicht
Student Guide SIPLACE X-Serie und X4I FSE 284
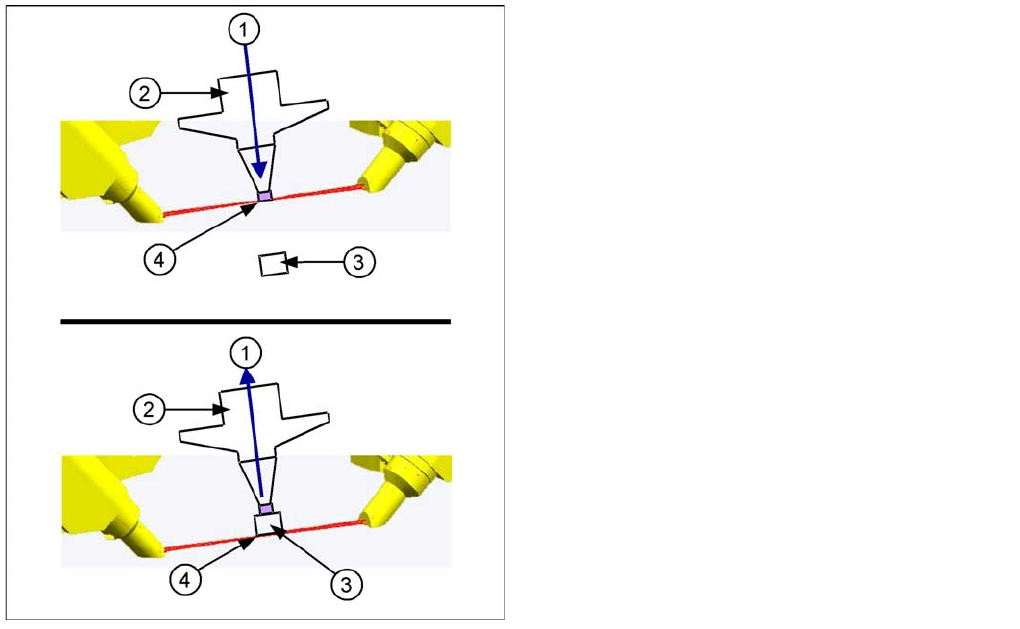
Funktionsweise des BE-Sensors
Funktionsweise des BE-Sensors
Abholvorgang:
Bei der Abwärtsbewegung der Z-Achse, unterbricht die Pipette den Laserstrahl. Diese Position der Z-
Achse wird genau in diesem Moment ausgelesen und mit dem Referenzwert vom Höhenreferenzlauf
bzw. nach dem Bestücken mit diesem Segment verglichen. Somit wird ermittelt ob sich noch ein BE an
der Pipette befindet. Weist die Z-Achsenposition auf ein BE an der Pipette hin, so wird die Z-Achse sofort
gestoppt. Eine Fehlermeldung wird ausgegeben oder das Bauelement wird abgeworfen und dem
Reparaturzyklus zugeführt, da es nicht bestückt wurde.
Bei der Aufwärtsbewegung der Z-Achse wird der Laserstrahl wieder frei und die Z-Position wird in
diesem Moment ausgelesen. Aufgrund der Z-Position bei der Abwärtsbewegung kann jetzt die
Anwesenheit eines Bauteils und die Höhe des BEs bestimmt werden.
Bestückvorgang:
Beim Bestückvorgang wird kontrolliert, ob sich das BE noch an der Pipette befindet (Z-
Abwärtsbewegung) bzw. ob das BE bestückt wurde (Z-Aufwärtsbewegung). Als Sicherheit werden diese
Z-Positionen mit denen vom Abholvorgang verglichen.
Damit wird eine max. Abhol- und Bestücksicherheit erreicht.
Legende
1. Abwärts- (obere Abb.) bzw. Aufwärtsbewegung
(untere Abb.)
2. Pipette
3. Bauelement
4. Auslesen der Z-Position, wenn der Laserstrahl
unterbrochen (obere Abb.) bzw. frei (untere Abb.) ist.
Das Signal des BE-Sensors ist direkt mit dem
Achscontroller (Messsystem) der Z-Achse verbunden.
Somit kann die Z-Position während der Abwärts- und
Aufwärtsbewegung ausgelesen werden.