00196043-05 - SG X und X4I FSE_de.pdf - 第298页
Collect-, Pick- und Place-Kopf (CPP) Vakuumsystem Referenzlauf CPP-K opf Student Guide SIPLACE X-Serie und X4I FSE 298 Referenzlauf C PP-Kopf 8.3 Referenzlauf CPP-Kopf Referenzlauf CPP-Kopf Beschreibung Der CPP-Kopf besi…
Collect-, Pick- und Place-Kopf (CPP)
Übersicht Vakuumsystem
297 Student Guide SIPLACE X-Serie und X4I FSE
Abholen von Bauelementen
8.2.8.2 Abholen von Bauelementen
Bestücken von Bauelementen
8.2.8.3 Bestücken von Bauelementen
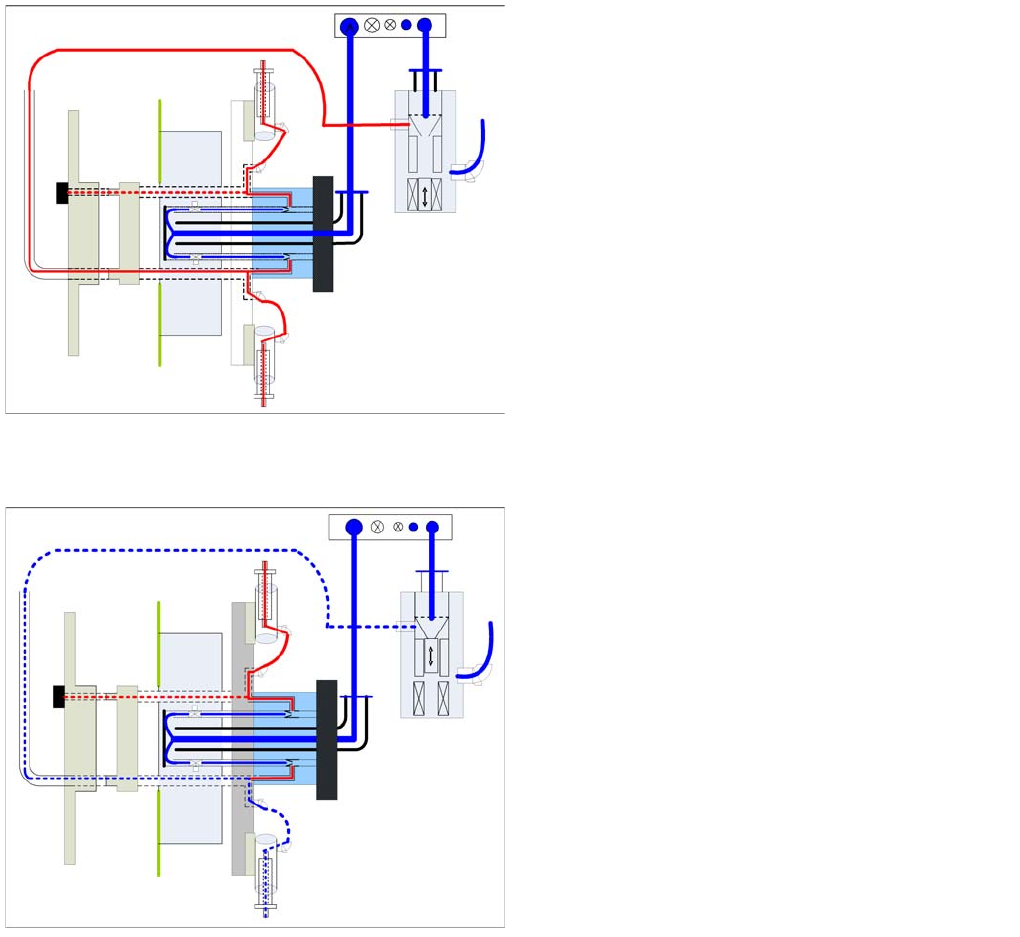
Bevor der Stern in die Abholposition dreht, wird über die
Ventilinsel das entsprechende Ventil eingeschaltet.
Damit liegt an der Pipette das Vakuum vom Haltekreis
an.
Wenn der Stern die Abholposition erreicht hat, wird das
Haltekreis-Vakuum über das Druckregelventil verstärkt
und das Bauteil kann abgeholt werden.
▪ Nachdem das Bauteil abgeholt wurde, wird das
Bauteil mit Hilfe des Vakuums über den Haltekreis an
der Pipette gehalten.
▪ Befindet sich der Stern in der Bestückposition und
der Z-Unten-Sensor wird aktiviert dann schaltet das
Druckregelventil auf Blasluft um. Damit wird das
Vakuum des Haltekreises eliminiert und eine Blasluft
von ca. 200 mbar liegt an der Pipette an.
▪ Der Einschaltzeitpunkt für max. Vakuum/Blasluft ist
abhängig von der Programmierung am
Programmiersystem.
▪ Nachdem die Z-Achse oben ist, dreht der Stern
weiter. Jetzt wird das entsprechende Ventil auf der
Ventilinsel geschlossen. Somit kann Druckluft
eingespart werden!
Collect-, Pick- und Place-Kopf (CPP)
Vakuumsystem Referenzlauf CPP-Kopf
Student Guide SIPLACE X-Serie und X4I FSE 298
Referenzlauf C PP-Kopf
8.3 Referenzlauf CPP-Kopf
Referenzlauf CPP-Kopf
Beschreibung
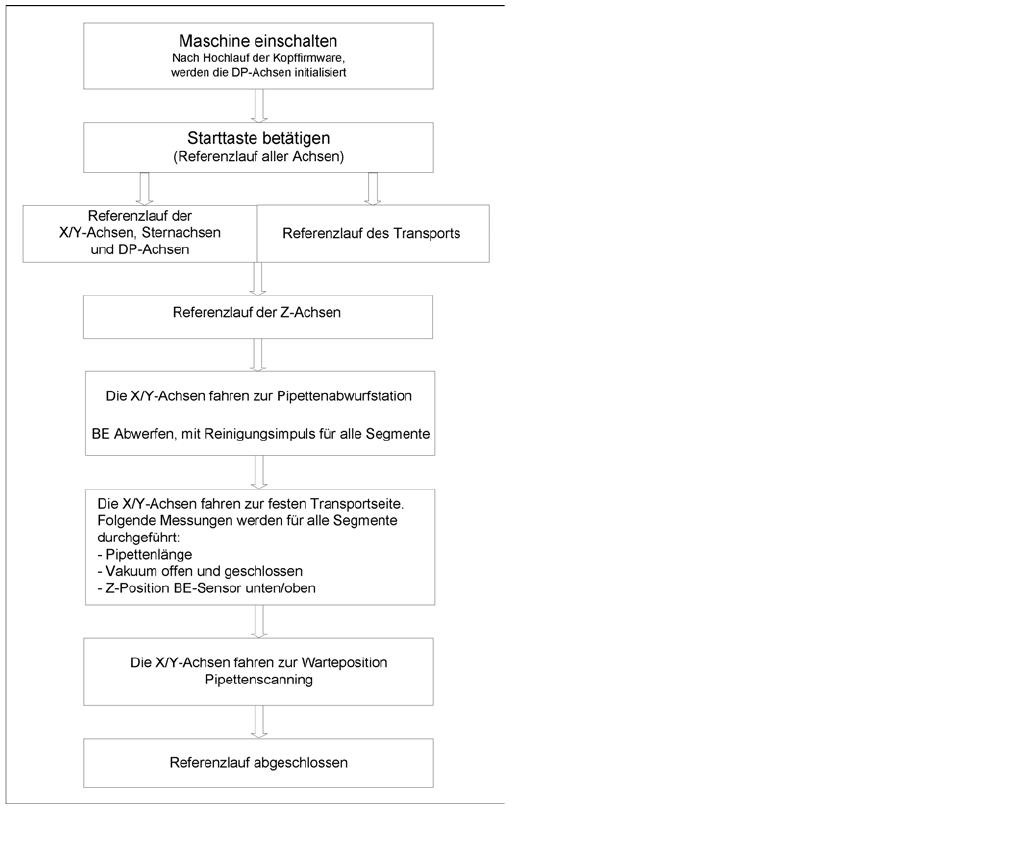
Der CPP-Kopf besitzt eine Z-, eine Stern- und zwölf
voneinander unabhängige DP-Achsen. Vor dem Start der
Bestückung müssen alle Achsen initialisiert werden.
Dadurch weiß die Steuerung, wo deren tatsächliche
mechanische Position ist.
Wenn die Software gestartet wird, überprüft die
Embedded-Software alle Subsysteme und sendet das
Ergebnis an die übergeordnete Steuerungssoftware.
Durch Betätigen der Starttaste wird der Referenzlauf
gestartet (siehe nebenstehendes Flussdiagramm).
Soweit möglich wurden die Abläufe optimiert und können
Parallel ablaufen (Stern- und DP-Achsen sowie die
Initialisierung des Transports).
Collect-, Pick- und Place-Kopf (CPP)
Referenzlauf CPP-Kopf Referenzlauf der Z-Achse
299 Student Guide SIPLACE X-Serie und X4I FSE
Referenzlauf der Z-Achse
8.3.1 Referenzlauf der Z-Achse
Referenzlauf der Stern-Achse
8.3.2 Referenzlauf der Stern-Achse
Vorbereitung der Z-Achse vor Referenzlauf (CPP)
Legende
A: Vakuummessung Haltekreis
B: Vakuummessung Bestückkreis
Durch die Rückholeinheit an der Z-Achse steht diese
schon nach dem Starten der Maschine in einer sicheren
Position (Z-Oben). Dies ist die Voraussetzung dafür,
dass der Referenzlauf der Z-Achse gestartet werden
kann.
HINWEIS! Die Nullpunktkorrektur im EEPROM
der Z-Achse muss mit dem Wert in den Maschinendaten
identisch sein.Von SW 702 an wird dieser Wert
automatisch in die Maschinendaten kopiert, wenn der
Kopf getauscht wird.
Die Z-Achse fährt nach unten zum Nullimpuls des
Inkrementalgebers. Nach Erreichen des Nullimpulses
wird die Nullpunktorrektur geladen.
Die Z-Achse fährt den Nullpunktkorrekturwert an und
setzt dann den Positionszähler auf 0 Digit.
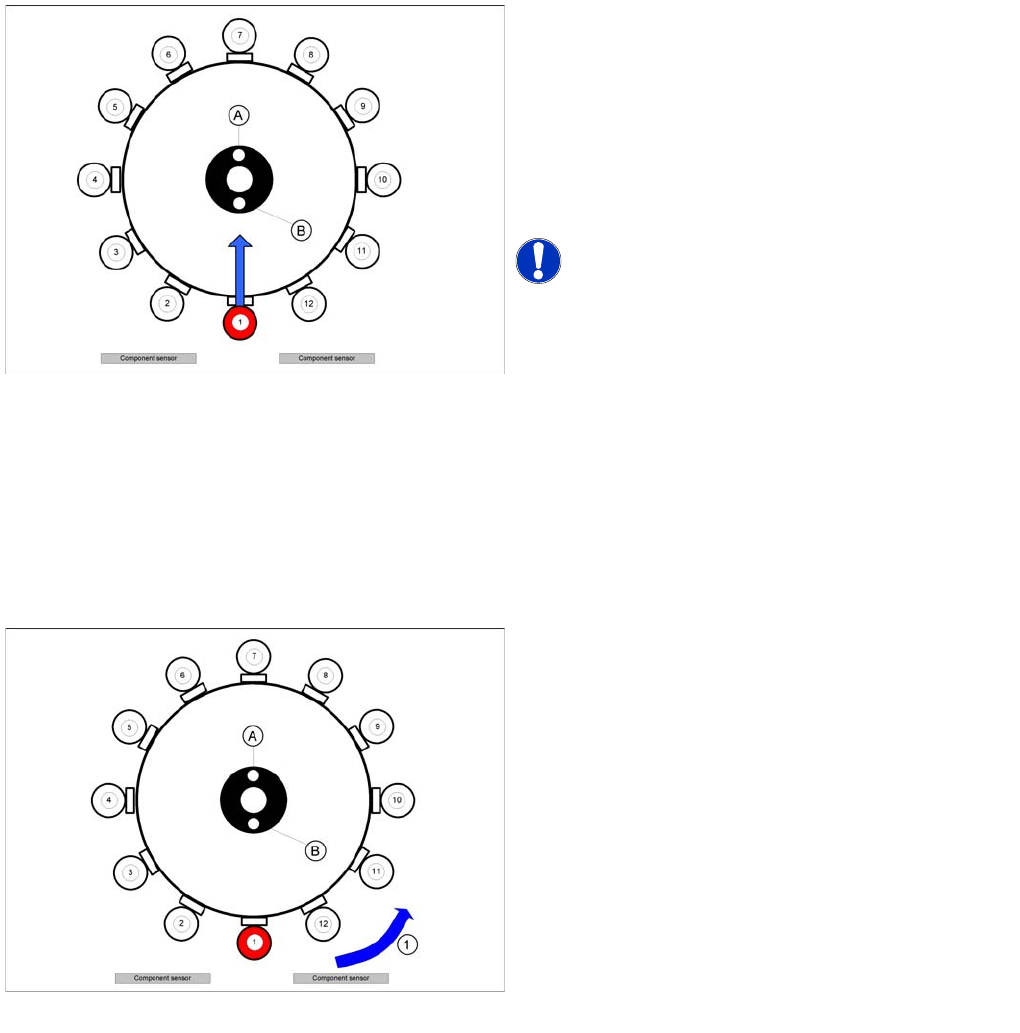
Referenzlauf Sternachse
Legende
1. Drehrichtung
A: Vakuummessung Haltekreis
B: Vakuummessung Bestückkreis
Die Stern-Achse dreht sich entgegen dem Uhrzeigersinn
(1) zum Nullimpuls des Inkrementalgebers. Nach
Erreichen des Nullimpulses wird die Nullpunktorrektur
geladen. Die Stern-Achse dreht sich um den
Nullpunktkorrekturwert weiter und setzt dann den
Positionszähler auf 0 Digit.
Segment Nummer 1 steht jetzt in Abhol-/Bestückposition.