00196043-05 - SG X und X4I FSE_de.pdf - 第303页
Collect-, Pick- und Place-Kopf (CPP) Abhol- und Bestückzyklus am CP P Messung Z-Achsenpositionen für d ie BE-Erkennung durch den BE-Sensor 303 Student Guide SIPLACE X-Serie und X4I FSE Messung Z- Achsenposi tionen fü r d…
Collect-, Pick- und Place-Kopf (CPP)
Feststellung der Vakuumwerte und Grenzwerte Referenzlauf CPP-Kopf
Student Guide SIPLACE X-Serie und X4I FSE 302
Feststellung der Vakuumwer te und Grenzwerte
8.3.5 Feststellung der Vakuumwerte und Grenzwerte
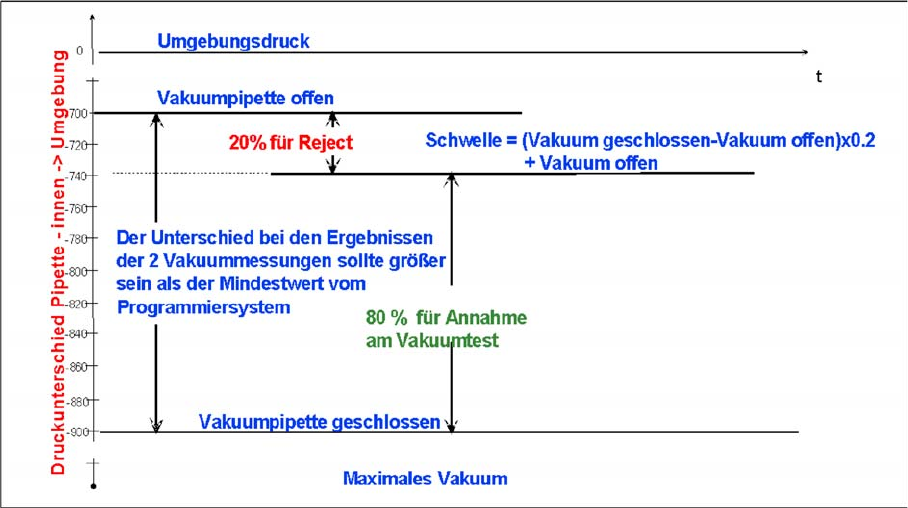
Messung und Berechnung der Vakuumwerte bei der Referenzfahrt
▪ Zwei Vakuummessungen werden beim Höhenreferenzlauf durchgeführt: die erste Messung bei
offenem, die zweite bei geschlossenem Zustand an der Pipettenspitze.
▪ Der Wert bei geschlossenem Segment hängt nicht mehr vom Umgebungsdruck ab, sondern wird
durch das Druckregelventil eingestellt. Ein Einfluss auf die Vakuummesswerte ist durch den
Pipettensitz (Pipettenabholfehler) und die Qualität (Verschmutzung/Beschädigung) der
Pipettenspitze gegeben.
▪ Der Wert bei offenem Druckregelventil hängt von der Pipettengröße und deren Zustand ab. Je
kleiner die Pipette, um so größer der Wert bei offenem Ventil. Dieser ist pipettenspezifisch vom
SIPLACE Pro-Rechner vorgegeben. Auch eine verunreinigte oder blockierte Pipette wird jedoch
einen hohen Wert ergeben.
▪ Der Unterschied zwischen offenen und geschlossenen Pipetten ist als Minimumwert durch das
Programmiersystem vorbestimmt. Dieser Wert ist für alle Pipettentypen unterschiedlich. z. B.
120 mbar für 1004, 1014...-er Pipetten. Können diese Werte nicht erreicht werden, erscheint die
Fehlermeldung "Vakuumdifferenz offen-geschlossen zu gering".
▪ Die Schwelle für die Bauteileakzeptanz wird zu diesem Zeitpunkt festgelegt. Angenommene
Messwerte einer 1004 Pipette: bei offener Pipette ein Wert von 660 und bei geschlossener Pipette
ein Wert von 852 mbar. Die Berechnung wird wie folgt durchgeführt:
Vakuumabstand = (852 (geschlossen) - 660 (offen) = 192 mbar.
Das ist größer als der im Parametersatz geforderte Vakuumabstand des Pipettentyps von 120 mbar.
Das offene Vakuum ist mit 660 mbar wesentlich höher als die geforderten 250 mbar.
Collect-, Pick- und Place-Kopf (CPP)
Abhol- und Bestückzyklus am CPP Messung Z-Achsenpositionen für die BE-Erkennung durch den BE-Sensor
303 Student Guide SIPLACE X-Serie und X4I FSE
Messung Z-Achsenpositionen für die BE-Erkennung durch den BE-Sensor
8.3.6 Messung Z-Achsenpositionen für die BE-Erkennung durch den BE-Sensor
Während die Z-Achse nach unten fährt, unterbricht die Pipette den Laserstrahl des BE-Sensors. In
diesem Moment wird die Achsposition ausgelesen und später zur Berechnung der BE-Höhe und BE-
Anwesenheit benutzt. Bei der Aufwärtsbewegung der Z-Achse wird der unterbrochene Laserstrahl frei
und die Achsposition nochmals ausgelesen. So kann die BE-Anwesenheit im Bestückprozess durch die
programmierte BE-Höhe (SIPLACE Pro) und der ermittelten Pipettenlänge während des
Höhenreferenzlaufs über den Positionszähler der Z-Achse berechnet werden.
Abhol- und Bestückzyklus a m CPP
8.4 Abhol- und Bestückzyklus am CPP
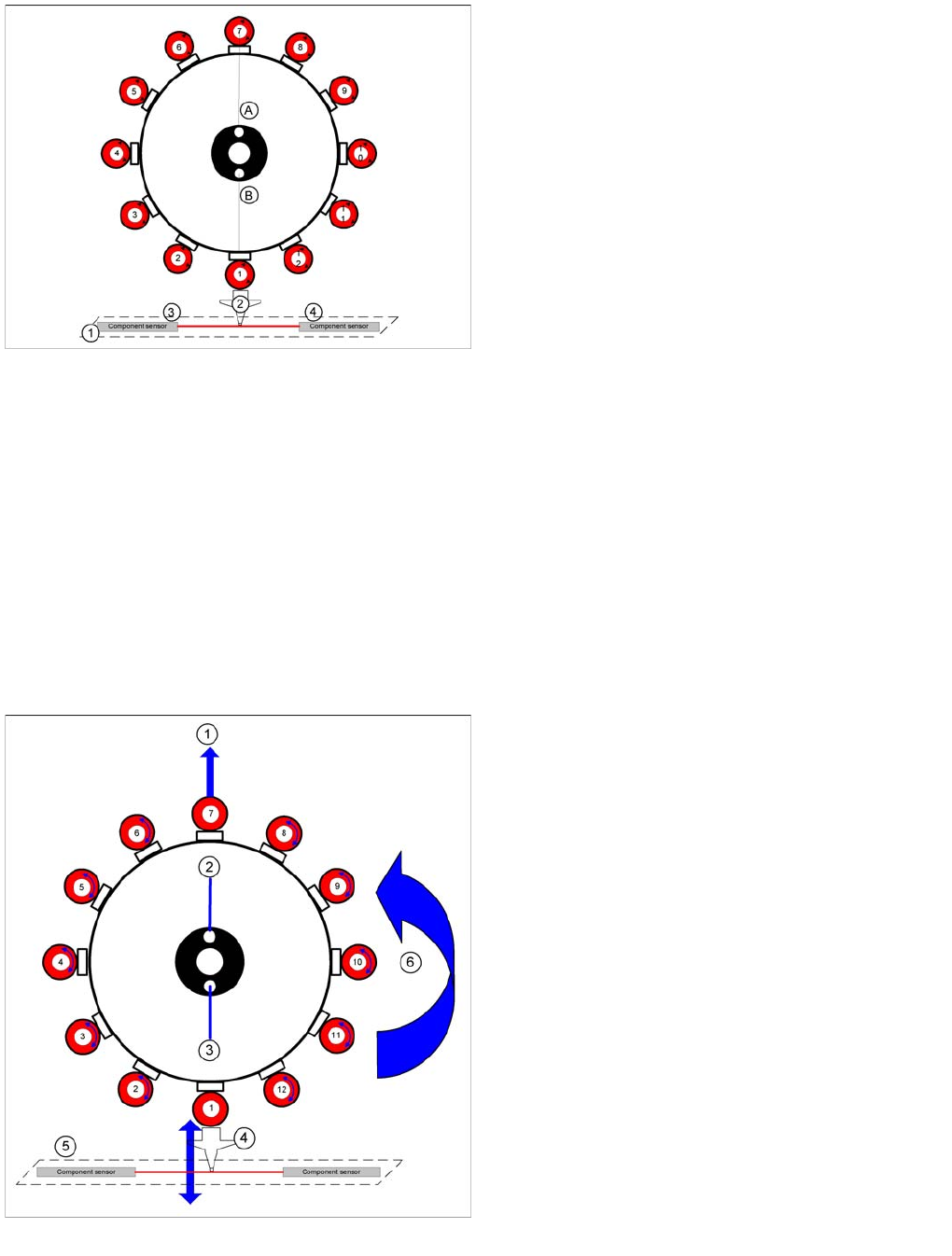
Arbeitspositionen am Bestückkopf
8.4.1 Arbeitspositionen am Bestückkopf
Pipettenlängenreferenzwerte für BE-Erkennung mit BE-
Sensor
Legende
1. BE-Sensor
2. Pipette
3. Empfänger
4. Sender
Der BE-Sensor ermittelt während des
Höhenreferenzlaufs die Z-Achsenositionen jedes
einzelnen Segments für die An- bzw. Abwesenheit von
Bauelementen in der Bestück-/Abholposition.
Arbeitspositionen am Bestückkopf
Legende
1. Optische Zentrierung (BE-Kamera)
2. Vakuummessung Haltekreis
3. Vakuummessung Bestückkreis
4. Abhol- / Bestückstation und Abwurfposition
5. Position BE-Sensor
6. Arbeitsrichtung im C&P-Modus
Collect-, Pick- und Place-Kopf (CPP)
Bestückmodi Abhol- und Bestückzyklus am CPP
Student Guide SIPLACE X-Serie und X4I FSE 304
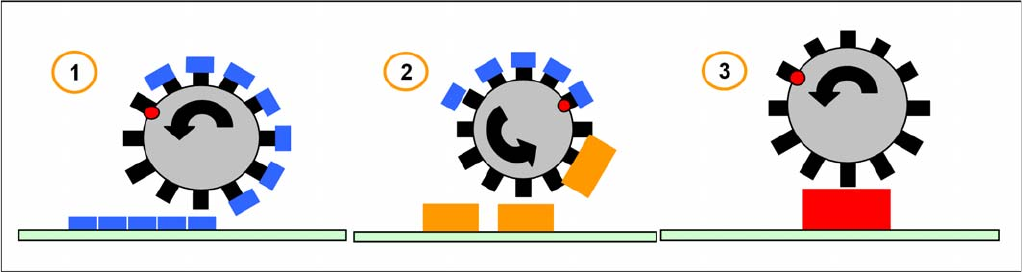
Bestückmodi
8.4.2 Bestückmodi
Der CPP-Kopf arbeitet wie der C&P12-Kopf nach dem Collect&Place-Prinzip, wobei zusätzliche
Betriebsmodi (Pick&Place, Mixed-Mode) zur Erweiterung des Bauteilspektrums möglich sind.
Der Bestückmodus ist einerseits abhängig von der konfigurierten Kamera und andererseits von den
Bauteilabmessungen und deren Toleranzen in SIPLACE Pro.
Der entsprechende Bestückmodus wird vom Optimierer in SIPLACE Pro bestimmt und kann nicht
beeinflusst werden.
Übersicht über die Bestückmodi
1. Collect&Place-Mode
Bauelementespektrum: 01005 - 27 x 27 mm, 8,5 mm Höhe
Geschwindigkeit: 20.000 bis 24.000 cph
Genauigkeit: +/- 55 µm @ 4 s; 0,3° @ 4 s
Der Collect-und-Place-Modus ist der gleiche Modus wie bei C&P6/12- und dem C&P20A-Bestückkopf.
Es werden, entsprechend der Anzahl vorhandener Segmente, Bauteile aufgenommen, mit der BE-
Kamera optisch zentriert und danach bestückt.
1. Mixed-Mode
Bauelementespektrum: 01005 - 32 x 32 mm, 11,5 mm Höhe
Im Mixed-Mode unterscheidet man die folgenden zwei Fälle:
▪ Die Bauteile können aufgrund ihrer geringen Größe durch den Kopf gedreht werden.
▪ Die Bauteile sind zu groß. Daher werden nur 2 oder 3 Bauteile abgeholt, welche dann über der
stationären Kamera zentriert und anschließend bestückt werden.
1. Pick&Place-Mode
Bauelementespektrum: 01005-50 x 40 mm, 11,5 mm Höhe
Geschwindigkeit: bis zu 1.500 cph
Genauigkeit: +/- 45 µm @ 4 s; 0,1° @ 4 s
P&P-Mode: Der Pick-und-Place-Mode ist der gleiche Modus wie beim IC- und TwinHead. D. h. für den
CPP-Kopf, dass je nach Bauteilgröße mit einem oder mehreren Segmenten Bauteile abgeholt werden.
Diese Bauteile können aufgrund ihrer Größe nicht durch den Kopf gedreht werden und müssen über
stationären Kamera optisch zentriert und bestückt werden.