00196043-05 - SG X und X4I FSE_de.pdf - 第304页
Collect-, Pick- und Place-Kopf (CPP) Bestückmodi Abhol- und Bestückzyklus am CPP Student Guide SIPLACE X-Serie und X4I FSE 304 Bestüc kmodi 8.4.2 Bestückmodi Der CPP-Kopf arbeitet wie d er C&P12-Kop f nach dem Collec…
Collect-, Pick- und Place-Kopf (CPP)
Abhol- und Bestückzyklus am CPP Messung Z-Achsenpositionen für die BE-Erkennung durch den BE-Sensor
303 Student Guide SIPLACE X-Serie und X4I FSE
Messung Z-Achsenpositionen für die BE-Erkennung durch den BE-Sensor
8.3.6 Messung Z-Achsenpositionen für die BE-Erkennung durch den BE-Sensor
Während die Z-Achse nach unten fährt, unterbricht die Pipette den Laserstrahl des BE-Sensors. In
diesem Moment wird die Achsposition ausgelesen und später zur Berechnung der BE-Höhe und BE-
Anwesenheit benutzt. Bei der Aufwärtsbewegung der Z-Achse wird der unterbrochene Laserstrahl frei
und die Achsposition nochmals ausgelesen. So kann die BE-Anwesenheit im Bestückprozess durch die
programmierte BE-Höhe (SIPLACE Pro) und der ermittelten Pipettenlänge während des
Höhenreferenzlaufs über den Positionszähler der Z-Achse berechnet werden.
Abhol- und Bestückzyklus a m CPP
8.4 Abhol- und Bestückzyklus am CPP
Arbeitspositionen am Bestückkopf
8.4.1 Arbeitspositionen am Bestückkopf
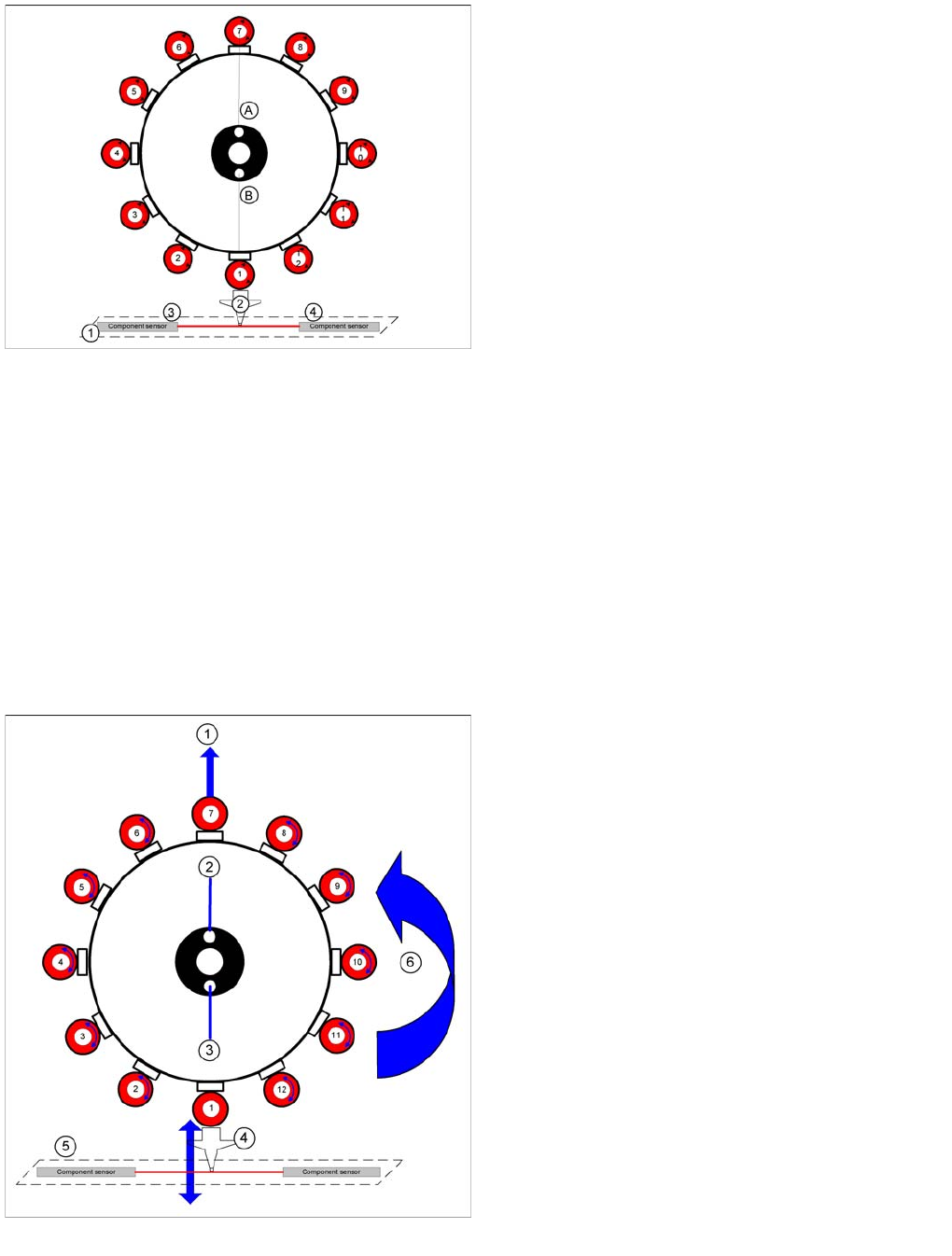
Pipettenlängenreferenzwerte für BE-Erkennung mit BE-
Sensor
Legende
1. BE-Sensor
2. Pipette
3. Empfänger
4. Sender
Der BE-Sensor ermittelt während des
Höhenreferenzlaufs die Z-Achsenositionen jedes
einzelnen Segments für die An- bzw. Abwesenheit von
Bauelementen in der Bestück-/Abholposition.
Arbeitspositionen am Bestückkopf
Legende
1. Optische Zentrierung (BE-Kamera)
2. Vakuummessung Haltekreis
3. Vakuummessung Bestückkreis
4. Abhol- / Bestückstation und Abwurfposition
5. Position BE-Sensor
6. Arbeitsrichtung im C&P-Modus
Collect-, Pick- und Place-Kopf (CPP)
Bestückmodi Abhol- und Bestückzyklus am CPP
Student Guide SIPLACE X-Serie und X4I FSE 304
Bestückmodi
8.4.2 Bestückmodi
Der CPP-Kopf arbeitet wie der C&P12-Kopf nach dem Collect&Place-Prinzip, wobei zusätzliche
Betriebsmodi (Pick&Place, Mixed-Mode) zur Erweiterung des Bauteilspektrums möglich sind.
Der Bestückmodus ist einerseits abhängig von der konfigurierten Kamera und andererseits von den
Bauteilabmessungen und deren Toleranzen in SIPLACE Pro.
Der entsprechende Bestückmodus wird vom Optimierer in SIPLACE Pro bestimmt und kann nicht
beeinflusst werden.
Übersicht über die Bestückmodi
1. Collect&Place-Mode
Bauelementespektrum: 01005 - 27 x 27 mm, 8,5 mm Höhe
Geschwindigkeit: 20.000 bis 24.000 cph
Genauigkeit: +/- 55 µm @ 4 s; 0,3° @ 4 s
Der Collect-und-Place-Modus ist der gleiche Modus wie bei C&P6/12- und dem C&P20A-Bestückkopf.
Es werden, entsprechend der Anzahl vorhandener Segmente, Bauteile aufgenommen, mit der BE-
Kamera optisch zentriert und danach bestückt.
1. Mixed-Mode
Bauelementespektrum: 01005 - 32 x 32 mm, 11,5 mm Höhe
Im Mixed-Mode unterscheidet man die folgenden zwei Fälle:
▪ Die Bauteile können aufgrund ihrer geringen Größe durch den Kopf gedreht werden.
▪ Die Bauteile sind zu groß. Daher werden nur 2 oder 3 Bauteile abgeholt, welche dann über der
stationären Kamera zentriert und anschließend bestückt werden.
1. Pick&Place-Mode
Bauelementespektrum: 01005-50 x 40 mm, 11,5 mm Höhe
Geschwindigkeit: bis zu 1.500 cph
Genauigkeit: +/- 45 µm @ 4 s; 0,1° @ 4 s
P&P-Mode: Der Pick-und-Place-Mode ist der gleiche Modus wie beim IC- und TwinHead. D. h. für den
CPP-Kopf, dass je nach Bauteilgröße mit einem oder mehreren Segmenten Bauteile abgeholt werden.
Diese Bauteile können aufgrund ihrer Größe nicht durch den Kopf gedreht werden und müssen über
stationären Kamera optisch zentriert und bestückt werden.
Collect-, Pick- und Place-Kopf (CPP)
Abhol- und Bestückzyklus am CPP Bestückmodi
305 Student Guide SIPLACE X-Serie und X4I FSE
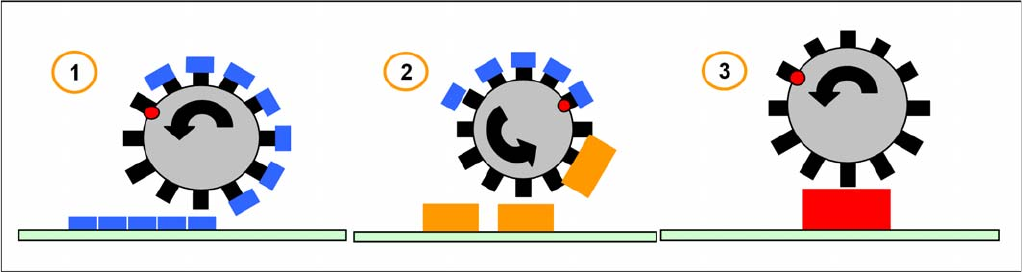
Beispiel
1. Collect&Place-Mode nur für kleine Bauelemente
2. Collect&Place-Mode (mit ausgelassenen Segmenten) für Bauelemente mittlerer Größe
3. Mixed-Mode - Collect&Place für kleine Bauelemente und Pick&Place für hohe Bauelemente
4. Mixed-Mode - Collect&Place für kleine Bauelemente und Pick&Place für ein großes Bauelement
Der Bestückmodus hängt von der konfigurierten BE-Kamera und der BE-Größe mit ihren Toleranzen in
SIPLACE Pro ab. Er wird automatisch von der Optimierungssoftware ausgewählt.
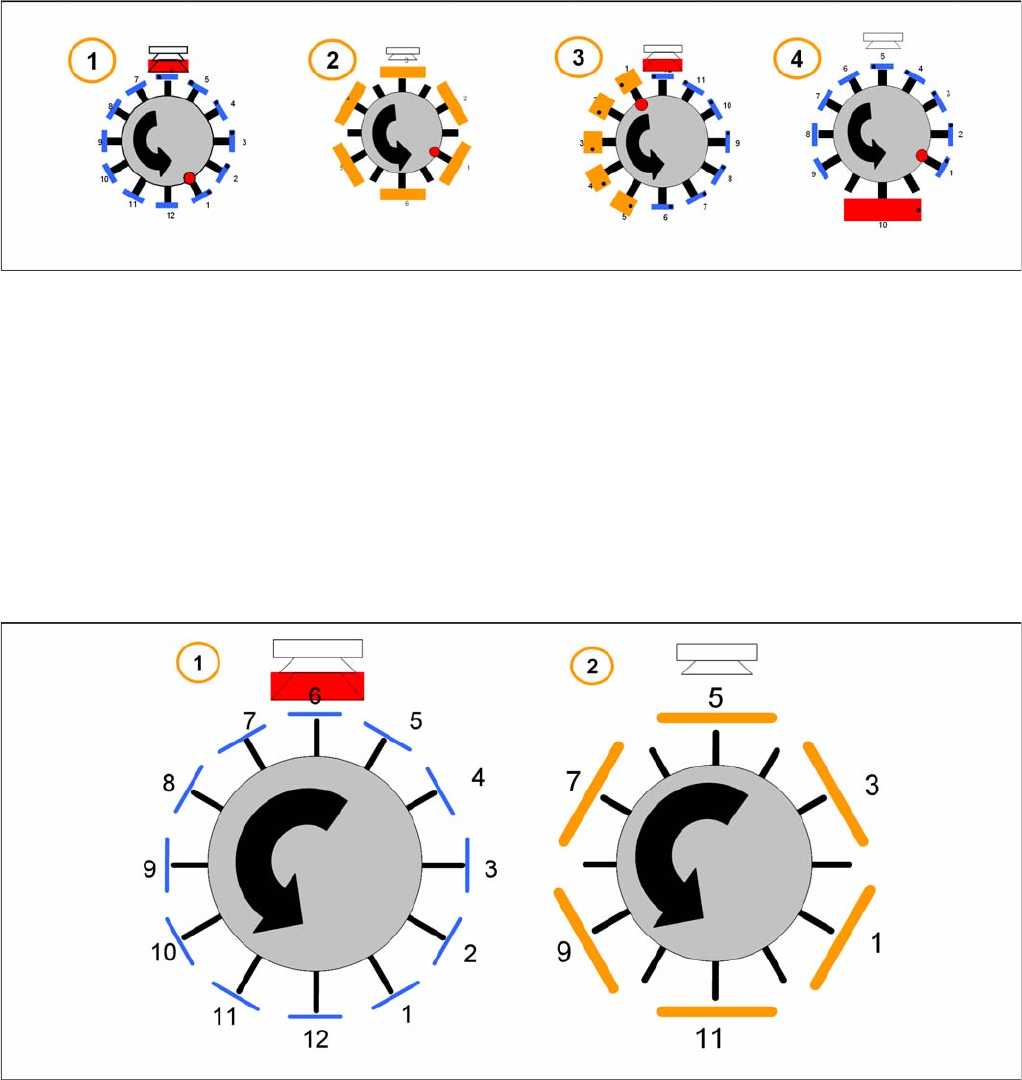
Collect&Place-Mode
8.4.2.1 Collect&Place-Mode
Der Collect&Place-Mode ist derselbe wie bei den vorhandenen C&P6/12- und C&P20-Köpfen.
Entsprechend der Anzahl der verfügbaren Segmente werden die Bauelemente abgeholt, zentriert und
bestückt.
1. Für den Standard-Collect&Place-Mode hängt die maximale BE-Größe von der Kamerakonfiguration
ab (SST29 & 38).
2. Bauelemente mit einer Größe von bis zu 32 x 32 mm (einschließlich der Toleranz in SIPLACE Pro)
können vom Kopf abgeholt und gedreht werden. Zentriert werden sie aber mit der stationären
Kamera.