00196043-05 - SG X und X4I FSE_de.pdf - 第307页
Collect-, Pick- und Place-Kopf (CPP) Abhol- und Bestückzyklus am CPP LP-Lageer kennung 307 Student Guide SIPLACE X-Serie und X4I FSE LP-Lagee rkennung 8.4.3 LP-Lageerkennung Wir unterscheiden zwische n einfacher Lage erk…
Collect-, Pick- und Place-Kopf (CPP)
Bestückmodi Abhol- und Bestückzyklus am CPP
Student Guide SIPLACE X-Serie und X4I FSE 306
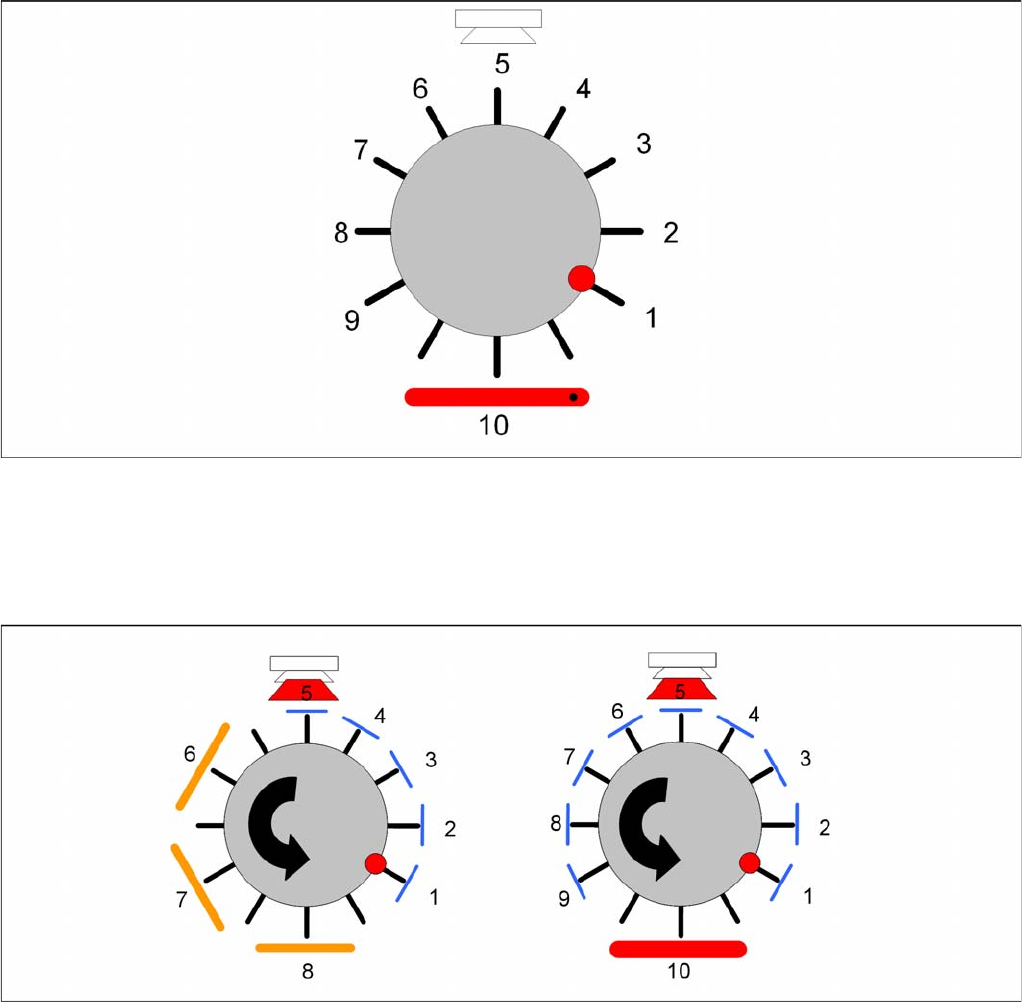
Pick&Place-Mode
8.4.2.2 Pick&Place-Mode
Der Pick&Place-Mode ist derselbe wie bei früheren IC-Köpfen und TwinHeads. Das Bauelement wird
mit einem Segment abgeholt, zur stationären Kamera verfahren und zentriert. Das Bauelement wird in
korrekter X-/Y- und Winkel-Position bestückt.
Mixed-Mode
8.4.2.3 Mixed-Mode
Entsprechend der Anzahl der verfügbaren Segmente holt der Kopf die Bauelemente ab und dreht sie.
Abhängig von der BE-Größe und dem Kameratyp zentriert der Kopf die Bauelemente mit der BE-
Kamera, während alle größeren Bauelemente von der stationären Kamera zentriert werden. Diese
Bauelemente werden entsprechend spezieller Eigenschaften und Restriktionen zuerst bestückt.
Die folgenden speziellen Eigenschaften und Restriktionen werden in SIPLACE Pro optimiert:
▪ Bauelement bedeckt BE-Sensor (Pipette und BE-Höhe bei 18,5 mm)
▪ Abhängigkeiten zwischen BE-Größe, BE-Gewicht und Kameratypen
▪ Bestückschatten bei Bauelementen von max. 11,5 mm Höhe
▪ Verfahrprofile der Bauelemente (für Stern, DP- und Z-Antrieb)
▪ Überlappung von Z- und Sternachse (z. B. 01005, große und flache Bauelemente)
Collect-, Pick- und Place-Kopf (CPP)
Abhol- und Bestückzyklus am CPP LP-Lageerkennung
307 Student Guide SIPLACE X-Serie und X4I FSE
LP-Lagee rkennung
8.4.3 LP-Lageerkennung
Wir unterscheiden zwischen einfacher Lageerkennung und doppelter Lageerkennung.
LP-Lageerkennung (einfache Lageerkennung)
Die Leiterplatten-Lageerkennung dient dazu, die genaue Position der Leiterplatte in der Maschine
(Transport --> Bestückbereich) zu bestimmen.
Die LP-Lagerkennung wird mit dem Portal 4 für den Bestückbereich 1 und mit dem Portal 2 im
Bestückbereich 2 durchgeführt.
Es sollten sich mindestens zwei Passmarken auf der Leiterplatte befinden. Mit diesen zwei Passmarken
kann die X/Y-Position und der Drehwinkel der LP im Transport festgestellt werden.
Die Passmarken sollten nicht auf einer Linie liegen.
Es können max. 3 Passmarken für die Lageerkennung programmiert werden. Mit dieser 3. Passmarke
kann zusätzlich zur Positionsbestimmung der LP im Transportsystem auch der Verzug innerhalb der
Leiterplatte (gestaucht, gestreckt) bestimmt und korrigiert werden.
Doppelte Lageerkennung (nur bei Alternating mode)
Die doppelte Lageerkennung ist notwendig um die Bestückgenauigkeit zu gewährleisten. Jedes Material
verändert sich in Abhängigkeit der Temperatur, so auch die Portale in der Maschine.
Die doppelte Lageerkennung wird mit Portal 1 im Bestückbereich 1 und mit Portal 3 im Bestückbereich
2 durchgeführt.
Bei der doppelten Lageerkennung berechnet sich das Portal 1/3 mit den Marken-
Lageerkennungswerten von Portal 2/4 den Bestück-Offset für Portal 1/3. Je nach Anordnung der Marken
auf der Leiterplatte werden 2 oder 3 Passmarken für die doppelte Lageerkennung benutzt.
Die Marken für die doppelte Lageerkennung werden so gewählt, dass eine möglichst genaue
Berechnung stattfinden kann.
Temperaturkompensation
Eine weitere Maßnahme um die Bestückgenauigkeit zu gewährleisten ist die Temperaturkompensation
mit Hilfe der Sensoren an der Kopfplatte. An der Kopfplatte sind zwei Temperatursensoren angebracht,
deren Temperaturwerte ständig über ein eigenes Bussystem abgefragt werden.
Die Software berechnet an Hand dieser Temperaturwerte einen Offsetwert, der zum Kopf-Offset addiert
wird.
▪ Kopf-Offset SW60x ist der Abstand LP <--> BE Kamera
▪ Kopf-Offset SW70x ist der Abstand LP Kamera <--> Pipettenspitze
▪ Der Temperatur-Referenzwert ist die Temperatur während der letzte Kalibrierung der Maschine.
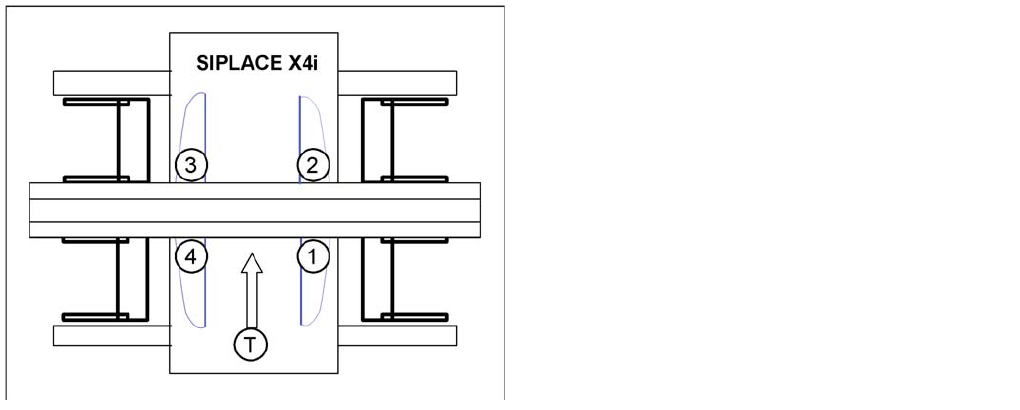
SIPLACE X4I:
▪ Portal 4 – Lageerkennung mit max. 3 Marken
▪ Portal 2 – Lageerkennung mit 2 Marken
▪ Portal 1 und Portal 3 – doppelte Lageerkennung
Legende
▪ 1: Portal 1
▪ 2: Portal 2
▪ 3: Portal 3
▪ 4: Portal 4
▪ T: Transportrichtung
Collect-, Pick- und Place-Kopf (CPP)
LP-Lageerkennung - Zentrierung der LP-Passmarken Abhol- und Bestückzyklus am CPP
Student Guide SIPLACE X-Serie und X4I FSE 308
LP-Lagee rkennung - Zentrie rung der LP-Passm arken
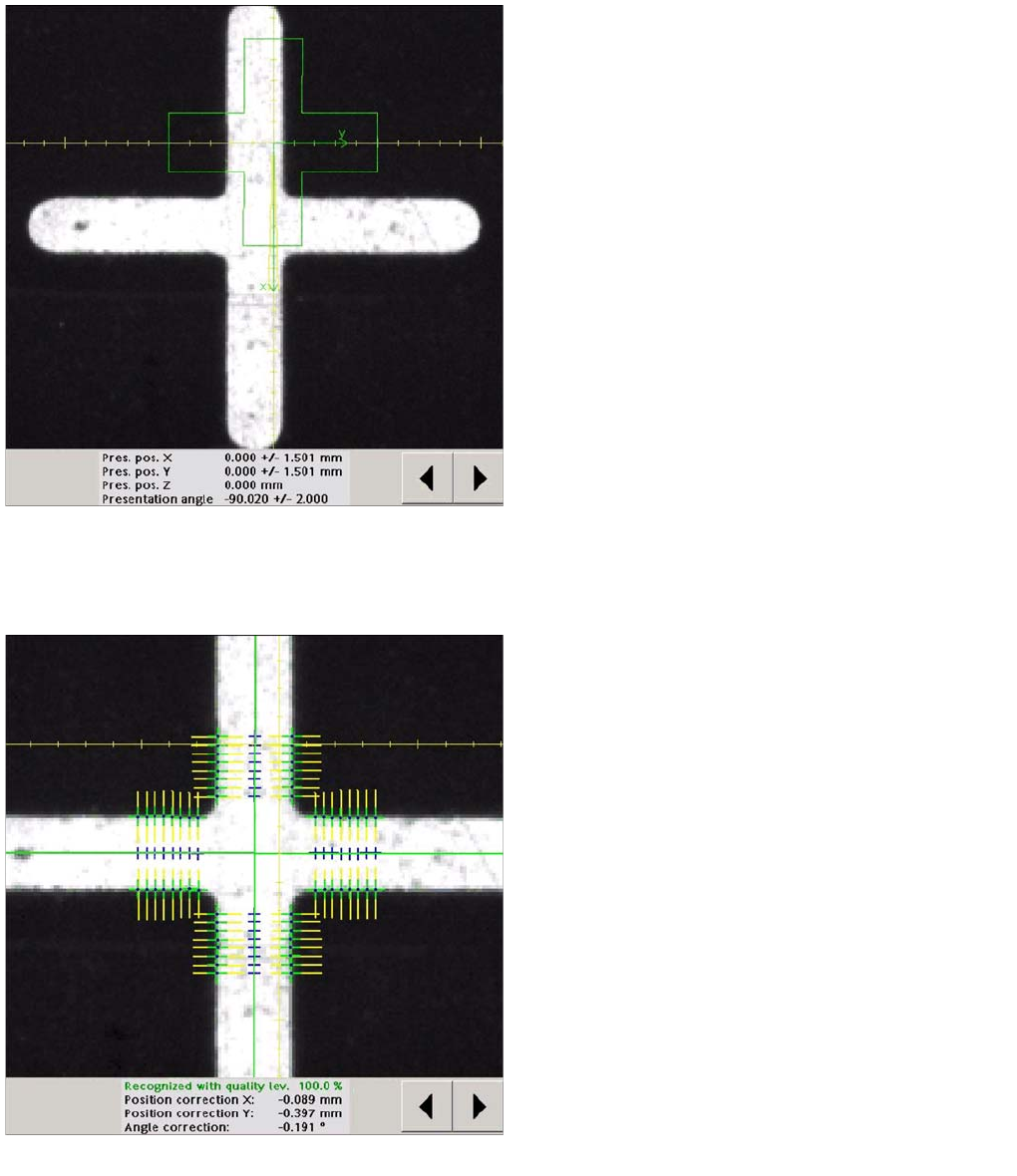
8.4.4 LP-Lageerkennung - Zentrierung der LP-Passmarken
LP-Lageerkennungsfahrt zur Sollposition der Leiterplatte
An dieser Sollposition wird eine Passmarke erwartet. Die
LP-Kamera wird aus der Warteposition zu dieser
Passmarken-Position bewegt.
▪ Die LP-Lageerkennung wird durchgeführt, bevor das
1. Bauelement aufgenommen wird.
▪ Die Portalachsen bewegen die LP-Kamera zu der
theoretischen Passmarken-Position. Die Kamera
macht eine Aufnahme der 1. Passmarke. Das
Visionsystem errechnet die Mittenposition.
LP-Lageerkennung – Zentrierung der LP-Passmarken
Die zentrierte Passmarke definiert jetzt die tatsächliche
Position der Leiterplatte.
▪ Die Kamera macht eine Aufnahme der 2. Passmarke
und das Visionsystem errechnet die Mittenposition
dieses Bildes.
▪ Die 2. Berechnung ist die Abweichung zwischen der
Soll- und der errechneten Passmarken-Position.
▪ Alle LP-Passmarken werden optisch mit diesem
Verfahren zentriert.
▪ Diese Daten werden an die Maschinensteuerung
geschickt.
▪ Korrigierte Werte werden für die X-, Y- und die
Winkelposition der Leiterplatte errechnet.
▪ Jetzt bewegen die Portalachsen den Bestückkopf zur
ersten Abholposition.