00196043-05 - SG X und X4I FSE_de.pdf - 第343页
TwinHead Referenzlauf Höhenreferenzlauf 343 Student Guide SIPLACE X-Serie und X4I FSE Höhenrefer enzlauf 9.2.3 Höhenreferenzlauf Vakuumc heck 9.2.4 Vakuumcheck ▪ Nachdem der Bootvorga ng des CAN -Bus-Prozessors für den V…
TwinHead
Referenzlauf an der Z-Achse Referenzlauf
Student Guide SIPLACE X-Serie und X4I FSE 342
Referenzlauf an der Z-Achse
9.2.1 Referenzlauf an der Z-Achse
Referenzlauf an der D-Achse
9.2.2 Referenzlauf an der D-Achse
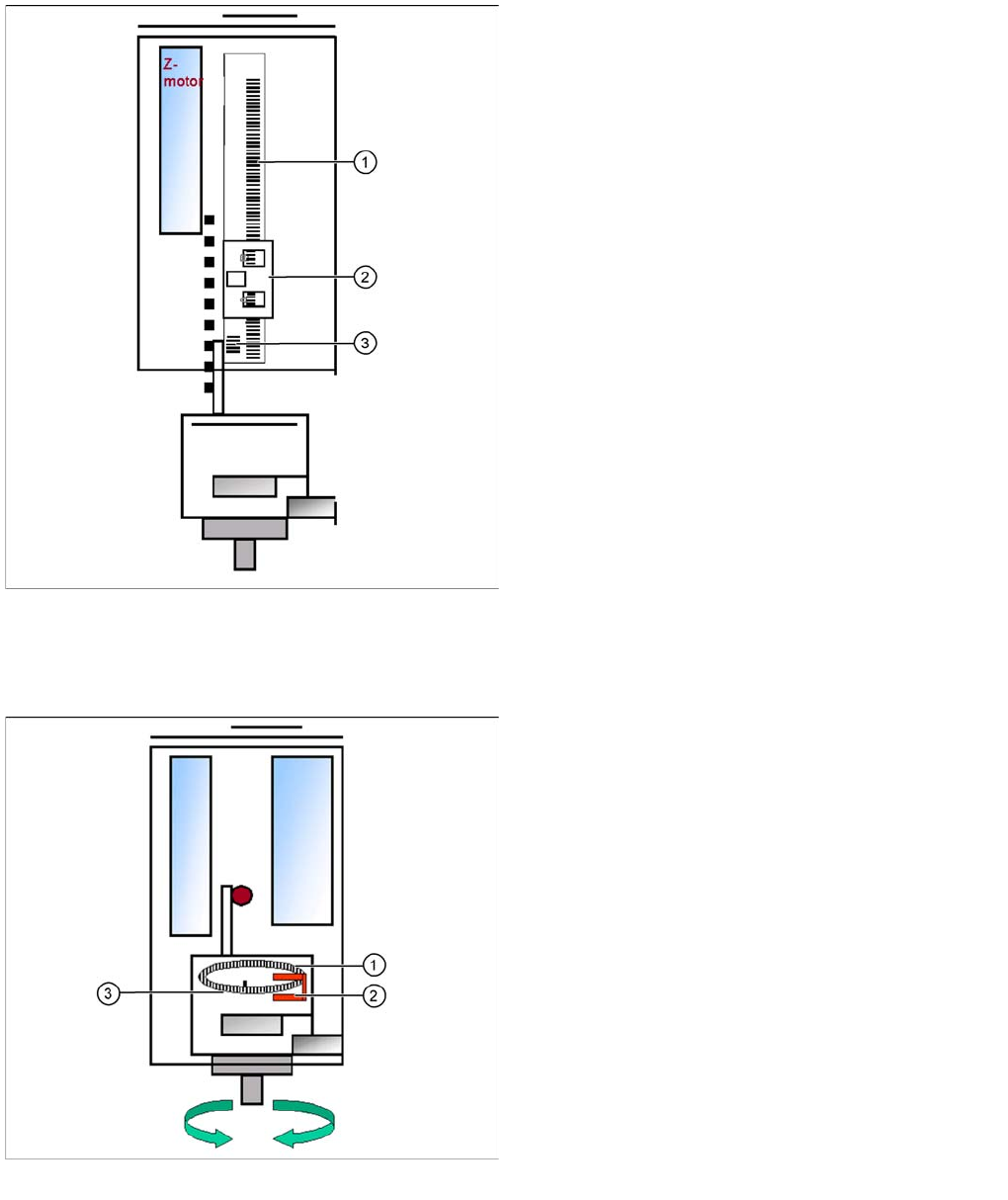
Referenzlauf Z-Achse
Legende
1. Inkremental-Maßstab montiert auf beweglichem Teil
der Z-Achse
2. Fest installierter Inkrementalgeber
3. Nullimpuls auf Inkremental-Maßstab (nur einer an
der Z-Achse)
▪ Suche der Z-Achse nach dem Kommutierungspunkt
des Linearmotors in einer für die Z-Achse speziellen
Betriebsart. (Ein 3~ AC-Motor fährt immer weiter
wenn der Strom von einer Phase auf die nächste
geschaltet wird und zwar zum richtigen Zeitpunkt und
in der richtigen Folge.)
▪ Dann fährt die Z-Achse bis zum Nullimpuls nach
oben und lädt die Nullpunktkorrektur.
▪ Die Ermittlung der Nullpunktkorrektur, max. und min.
Verfahrwege erfolgt beim Kalibrieren der Kopfhöhe.
Referenzlauf D-Achse
Legende
1. Inkremental-Glasmaßstab der D-Achse
2. Inkrementalgeber
3. Nullimpuls am Inkremental-Glasmaßstab
Dann führt die D-Achse (drehende Achse) den
Referenzlauf durch.
Die D-Achse fährt zum Nullimpuls des D-Achsen-
Inkrementalgebers. Die Nullpunktkorrektur wird geladen.
Abhängig von dem Vorzeichen fährt die D-Achse zur
Referenzposition.
Referenzlauf beendet! Es folgt der Portalreferenzlauf
(siehe Abschnitt Portal).
TwinHead
Referenzlauf Höhenreferenzlauf
343 Student Guide SIPLACE X-Serie und X4I FSE
Höhenreferenzlauf
9.2.3 Höhenreferenzlauf
Vakuumcheck
9.2.4 Vakuumcheck
▪ Nachdem der Bootvorgang des CAN-Bus-Prozessors für den Vakuum-/Blaslufterzeuger
abgeschlossen ist, ist dieser initialisiert. D. h. an der Pipette wird durch Regelung im Vakuum-/
Blaslufterzeuger weder Vakuum noch Blasluft erzeugt.
▪ Die Portalachsen verfahren den TwinHead an die Abwurfposition.
▪ Über dem Abwurfbehälter schaltet der Vakuum-/Blaslufterzeuger auf Blasluft, um Bauelemente
abzuwerfen und die Blasluft zu prüfen.
▪ Jetzt wird am Vakuum-/Blaslufterzeuger auf Vakuum umgeschaltet und das offene Vakuum der
beiden Segmente gemessen (X-, SX- und D3-Maschine, D1: ein Twin-Segment)*.
▪ Der Druck wird nach der Messung wieder auf 0 bar geregelt.
▪ Damit ist der Vakuum-Referenzlauf für den TwinHead beendet.
* Der geschlossene Vakuumwert der Twin-Segmente wird auf den Kalibrierwert bezogen.
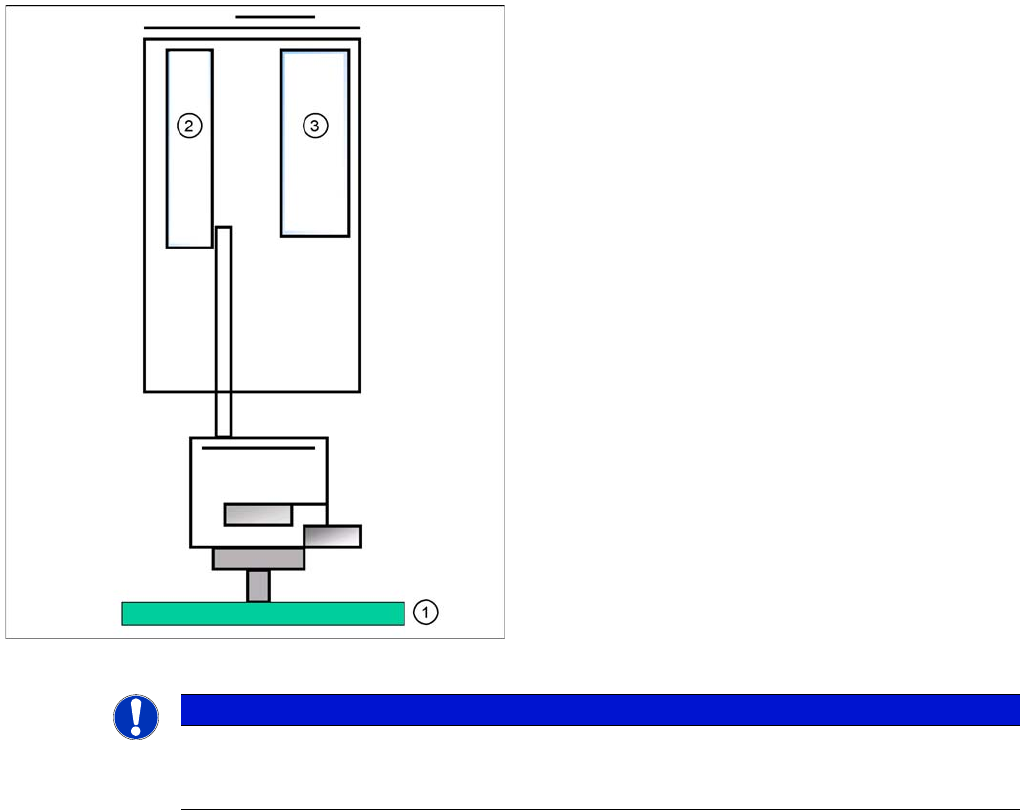
Messen der Pipettenhöhe
Mit dieser Funktion wird geprüft, ob es sich um den
richtigen, programmierten Pipettentyp handelt. Die
Pipettenlänge wird herangezogen, um die Abhol-,
Zentrier- und Bestückhöhe für die nachfolgenden
Bestückvorgänge zu berechnen.
Legende
1. Oberseite der festen Transportwange
2. Z-Motor
3. Vakuum Blasluft-Erzeugung
► Das Portal fährt die Bestückköpfe über die feste
Transportwange.
► Die Z-Achse positioniert Modul 2 (X/D3-Maschine)
nach unten.
► Vom Verfahrbereich der Z-Achse wird die Höhe des
TwinHead berechnet in Bezug auf den Pipettentyp.
► Jetzt erfolgt für Modul 1 der gleiche Vorgang.
► Die max. Längentoleranz beträgt 0,4 mm: Ist die
Längendifferenz zu groß, wird eine Fehlermeldung
angezeigt.
HINWEIS
Beide Module werden an derselben Position des LP-Transports gemessen!
Dieser Referenzlauf des TwinHeads erfolgt parallel zu den anderen Bestückköpfen in der
Maschine.
TwinHead
Allgemeines Abhol- und Bestückzyklus beim TwinHead
Student Guide SIPLACE X-Serie und X4I FSE 344
Abhol- und Bestückzyklus beim TwinHea d
9.3 Abhol- und Bestückzyklus beim TwinHead
Allgemeines
9.3.1 Allgemeines
Bestückprinzip des TwinHead
9.3.2 Bestückprinzip des TwinHead
Das Portal wartet während der LP-Transportzeit an der theoretischen Passmarken-Position, um die
Leiterplattenzentrierung (und Inkpunkt-Erkennung) nach der LP-Klemmung durchzuführen. Mit
"Whispering down the machine" wertet Portal 3 nur noch zwei Passmarken aus.
Der TwinHead holt nun zunächst mit Modul 1 dann mit Modul 2 jeweils ein Bauelement ab.
Anschließend werden diese Bauelemente über der IC-Kamera (FC-Kamera) zentriert und bestückt.
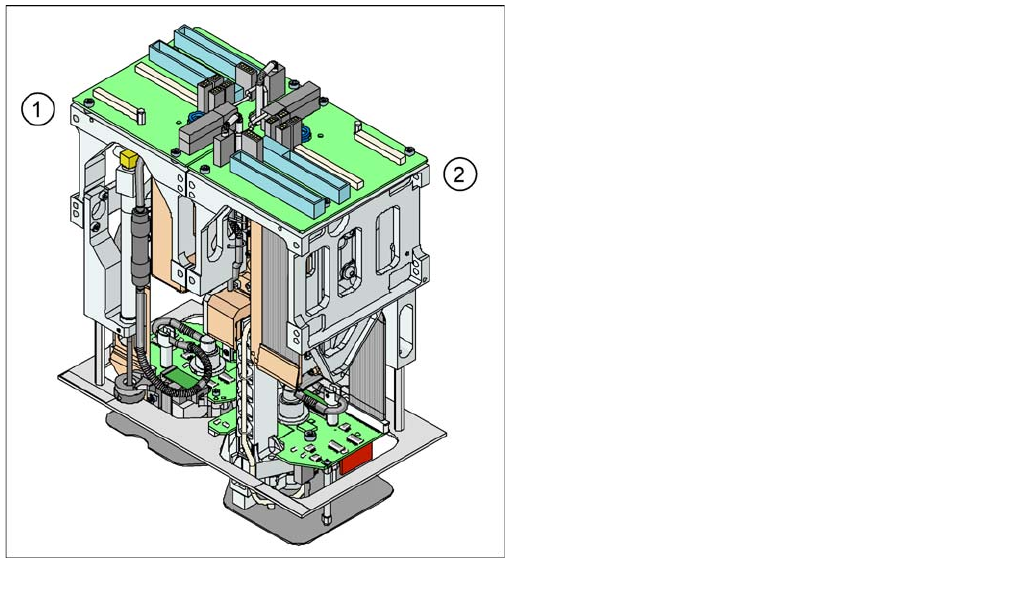
Ansicht TwinHead
Das Modul 2 (2) des TwinHead ist gegenüber
Modul 1 (1) um 180 Grad gedreht montiert.
▪ Der Abstand in X-Richtung zwischen den Pipetten
beträgt ca. 71 mm.
▪ Die maximale Bauteil-Höhe beträgt 25 mm.
▪ Die Aufsetzkraft beim Bestücken kann programmiert
werden von 0.5 N bis 15 N (bei einem Highforce
TwinHead bis 30 N).
▪ Die Winkelgenauigkeit beträgt 0.07 Grad, 4 Sigma/X-
und Y-Achsen 35 µm 4 Sigma .
▪ Die Fähigkeit, Sonderbauelemente zu bestücken
wurde weiter verbessert: