00196043-05 - SG X und X4I FSE_de.pdf - 第466页
Kalibrierung Köpfe und Kameras Grundsätzliche Erläuterung der Kalibrierschritte Student Guide SIPLACE X-Serie und X4I FSE 466 ▪ substrahiere Kopfhöh e au s der Ideal.ma (655 00) ▪ substrah iere theo retische Pipe ttenlän…
Kalibrierung
Grundsätzliche Erläuterung der Kalibrierschritte Köpfe und Kameras
465 Student Guide SIPLACE X-Serie und X4I FSE
Segment-Offset
Die Segment-Offsets oben und unten werden in einem Kalibrierschritt für jedes Segment ermittelt.
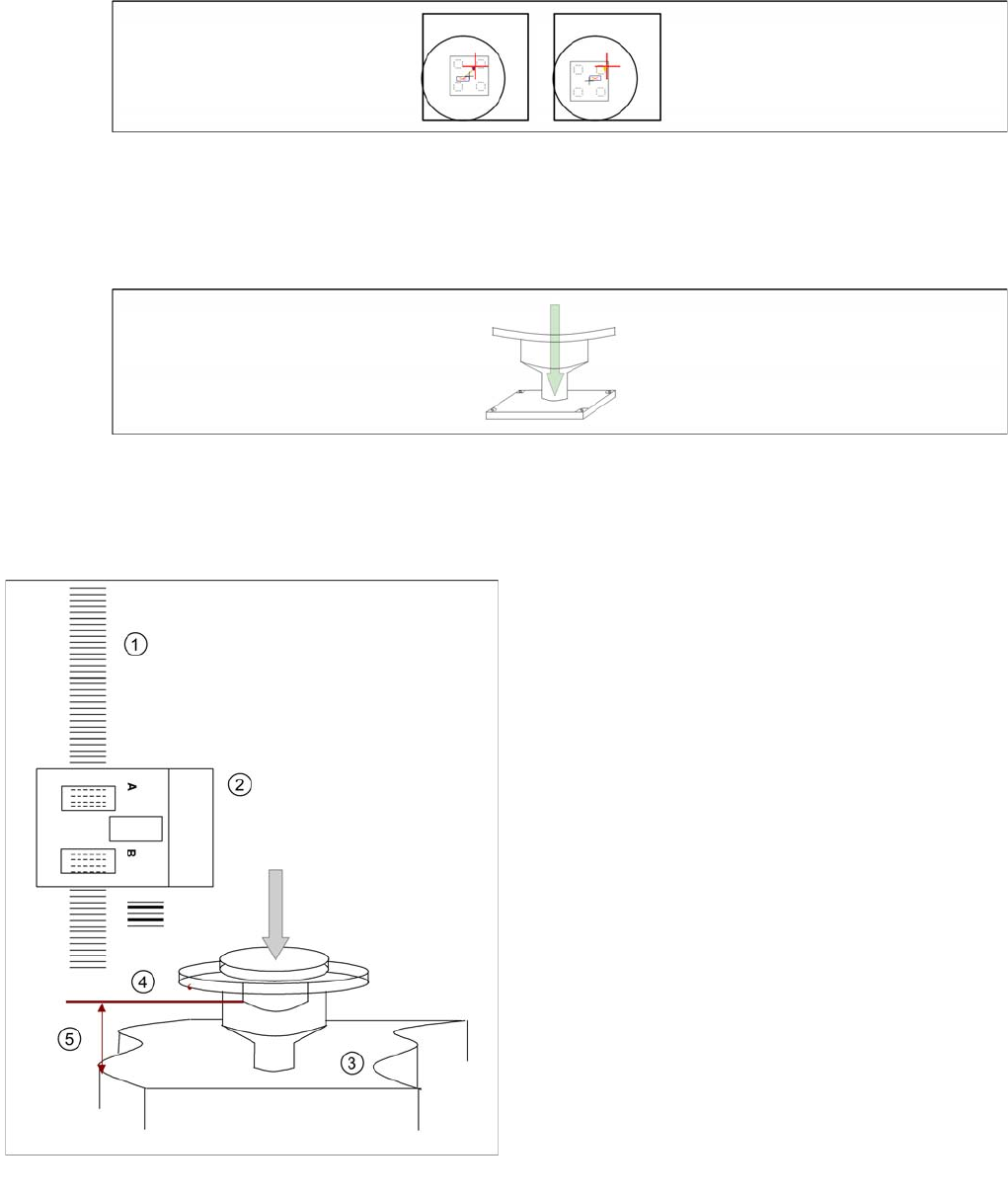
Beim Segment-Offset oben wird das Kalibrierteil in der BE-Kamera in 0°-, 90°-, 180°- und 270°-Schritten
gedreht. Dabei wird der rotierende Mittelpunkt der Pipettenspitze in Bezug auf die BE-Kameramitte in X-
und Y-Richtung ermittelt. (Siehe Bild)
Segment-Offset oben
Beim Segment-Offset unten wird das Kalibrierteil in 0°-, 90°-, 180°- und 270°-Lage in die Eichteiltasche
abgelegt und mit der LP-Kamera vermessen. Dabei wird der rotierende Mittelpunkt der Pipettenspitze
bei ausgefahrener Z-Achse in Bezug auf die LP-Kamera ermittelt. Hier wird das Segment1 als Referenz
mit dem Wert 0 angenommen.
Segment-Offset unten
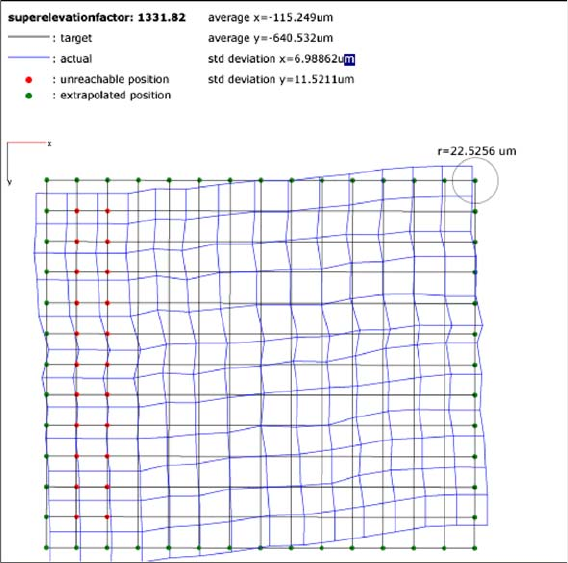
TwinHead-Kopfhöhe:
12.4.7.1 TwinHead-Kopfhöhe:
Kopfhöhe kalibrieren bedeutet, die Nullpunktkorrektur der Z-Achse aufzunehmen.
Ablauf:
▪ der Nullimpuls wird angefahren -> der Positionszähler zu 0 gesetzt.
▪ mit der 517er Pipette setzt der TwinHead auf die Transportwange auf.
TwinHead-Kopfhöhe
Legende
1. Inkrementalgeber Z-Achse
2. Inkrementalgeber (fest)
3. Obere Kante der Transportwange
4. Kopfhöhe
5. Pipettenlänge

Kalibrierung
Köpfe und Kameras Grundsätzliche Erläuterung der Kalibrierschritte
Student Guide SIPLACE X-Serie und X4I FSE 466
▪ substrahiere Kopfhöhe aus der Ideal.ma (65500)
▪ substrahiere theoretische Pipettenlänge (Länge ohne Pipettenadapter).
▪ Zpos.akt. - Pip.länge - Kopfhöhe = Nullpunktkorrektur
IC-Kamera:
12.4.7.2 IC-Kamera:
▪ Nach dem Messen der Kopfhöhe (Nullpunktkorrektur Z-Achse) wird die IC-Kamera kalibriert.
▪ Die erste Messung ist die Fokusebene für die stationäre Kamera. Der TwinHead fährt mit der Z-
Achse auf die Abdeckung der Kamera. (Diese Höhe wird später mit der BE-Unterseite angefahren.)
▪ Die Pixelgröße (in µm) der Kamera wird berechnet. Abgespeichert wird als:
XU_Pixel / YU_Pixel der Kamera 11 (in 79000 nm).
▪ Die Kameramitte der IC-Kamera bezieht sich auf den Zählernullpunkt des Portalachsen
Positioniersystems.
Eingetragen sind diese Koordinaten in der Cameras.xml Datei im Datenblock Camera des jeweiligen
Portals:
Näherungswerte in nm
Resolution yuPixel=41750
xuPixel=41750
Die Kalibrierdaten der IC-Kamera werden gespeichert in der Datei cameras.xml.
▪ Kalibrieren der IC Kamera Positionsmarke.
FC-Kamera: (Option)
12.4.7.3 FC-Kamera: (Option)
▪ Nach dem Messen der Kopfhöhe wird die FC-Kamera kalibriert.
▪ Die erste Messung ist die Fokusebene für die stationäre Kamera. Der TwinHead fährt mit der Z-
Achse auf die Abdeckung der Kamera. (Diese Höhe wird später mit der BE-Unterseite angefahren.)
▪ Die Pixelgröße in µm der Kamera wird festgelegt.
Abgespeichert werden in der cameras.xml Datei im Datenblock Camera des jeweiligen Portals
folgende Näherungswert in nm:
– yUPixel=16250
– xUPixel=16250
▪ Die Kameramitte der FC-Kamera bezieht sich auf den Zählernullpunkt des Portalachsen
Positioniersystems.
▪ Eingetragen sind diese Koordinaten beim Datenblock Kamera 15: (Portal 2)
Kamera_Position_X / Kamera_Position_Y/ Kamera_Offset_Z/
▪ Kalibrieren der IC-Kamera Positionsmarke.
TwinHead Segment-Offset unten für Segment 1 und 2:
12.4.7.4 TwinHead Segment-Offset unten für Segment 1 und 2:
▪ Die D-Achse bzw. die Pinolenmitte des TwinHeads bezieht sich auf den Kameramittelpunkt der LP-
Kamera.
Eingetragen sind diese Koordinaten in PIP_OFF.MA im Datenblock
/Pipetten-Offsets unten Kopf 2/
Pipetten-Offsets unten Segment 1(2) Offset_X /Offset_Y /
Pipettenwechsler (C&P, TwinHead):
12.4.7.5 Pipettenwechsler (C&P, TwinHead):
VORSICHT
Vor dem Starten der Kalibrierung des Pipettenwechslers muss die Nullpunktkorrektur der D-
Achse (TwinHead) überprüft bzw. kalibriert werden. Weiterhin sollte die Konfiguration des
Pipettenwechslers und der Füllstand überprüft werden.
Kalibrierung
Grundsätzliche Erläuterung der Kalibrierschritte LP-Mapping
467 Student Guide SIPLACE X-Serie und X4I FSE
▪ Jedes Pipettenmagazin besitzt eine Passmarke (Bohrung), die zu Beginn des Kalibrierablaufs
angefahren und erkannt werden.
▪ Danach werden die beiden Passmarken (Bohrungen) der Halterung rechts und links angefahren
rechts angefahren und erkannt.
▪ optional kann nun die Abholhöhe des Pipettenwechslers kalibriert werden.
▪ optional kann nun die Abwurfposition des Pipettenwechslers kalibriert werden. Diese Position wird
im Betrieb beim Abwerfen defekter Pipetten angefahren.
Vakuum geschlossen kalibrieren:
12.4.7.6 Vakuum geschlossen kalibrieren:
Bei dieser Funktion wird auf der festen Transportwange mit der 518er Pipette der Wert bei
geschlossenem Vakuumsystem für Segment 1 und 2 ermittelt.
LP-Mapping
12.4.8 LP-Mapping
Beim LP-Mapping wird die Rechtwinkligkeit der X- und Y-Achsen zueinander mit der LP-Kamera für alle
Portale und Transportspuren vermessen.
Damit wird auch ein Bezug zur Position des Transportsystems zum Portalsystem hergestellt. Hierzu
werden mit der LP-Kamera Passmarken-Kreuze auf einer hochpräzisen Glasplatte vermessen.
Diese Mappingplatte wurde in einer Messmaschine vermessen, das Vermessungsprotokoll wird
während des Mappingvorganges berücksichtigt.
Ergebnisse des Mappingvorgangs
Die Ergebnisse werden in einer XML-Datei für jedes Portal und jede Transportspur gespeichert.
Kopf-Map ping
12.4.9 Kopf-Mapping
Mit dem Kopf-Mapping wird die Linearität der X- und Y-Linearführungen des C&P-Kopfes gemessen,
d. h. die Verdrehung des Portals in sich wird hier kompensiert.
Der C&P-Kopf bestückt das Kalibrierteil auf vorgegebene Sollpositionen der Mappingplatte. Die LP-
Kamera misst die Bestückgenauigkeit dieser Bestückungen für den gesamten Bearbeitungsbereich.
Das Kalibrierteil wird nach jedem Messvorgang mit der BE-Kamera neu vermessen und danach wird die
nächste Sollposition auf der Mappingplatte angefahren.