00196043-05 - SG X und X4I FSE_de.pdf - 第93页
Kommunikation und Steuerung CAN-Bus CAN-Bus-Struktur 93 Student Guide SIPLACE X-Serie und X4I FSE CAN-Bus-Struktur SIPLACE X2 4.3.3.1 CAN-Bus-Struktur SIPLACE X2 Gesamtübersicht CAN-Bus X2 Der Bestückautomat SIPLACE X2 v…
Kommunikation und Steuerung
CAN-Bus-Struktur CAN-Bus
Student Guide SIPLACE X-Serie und X4I FSE 92
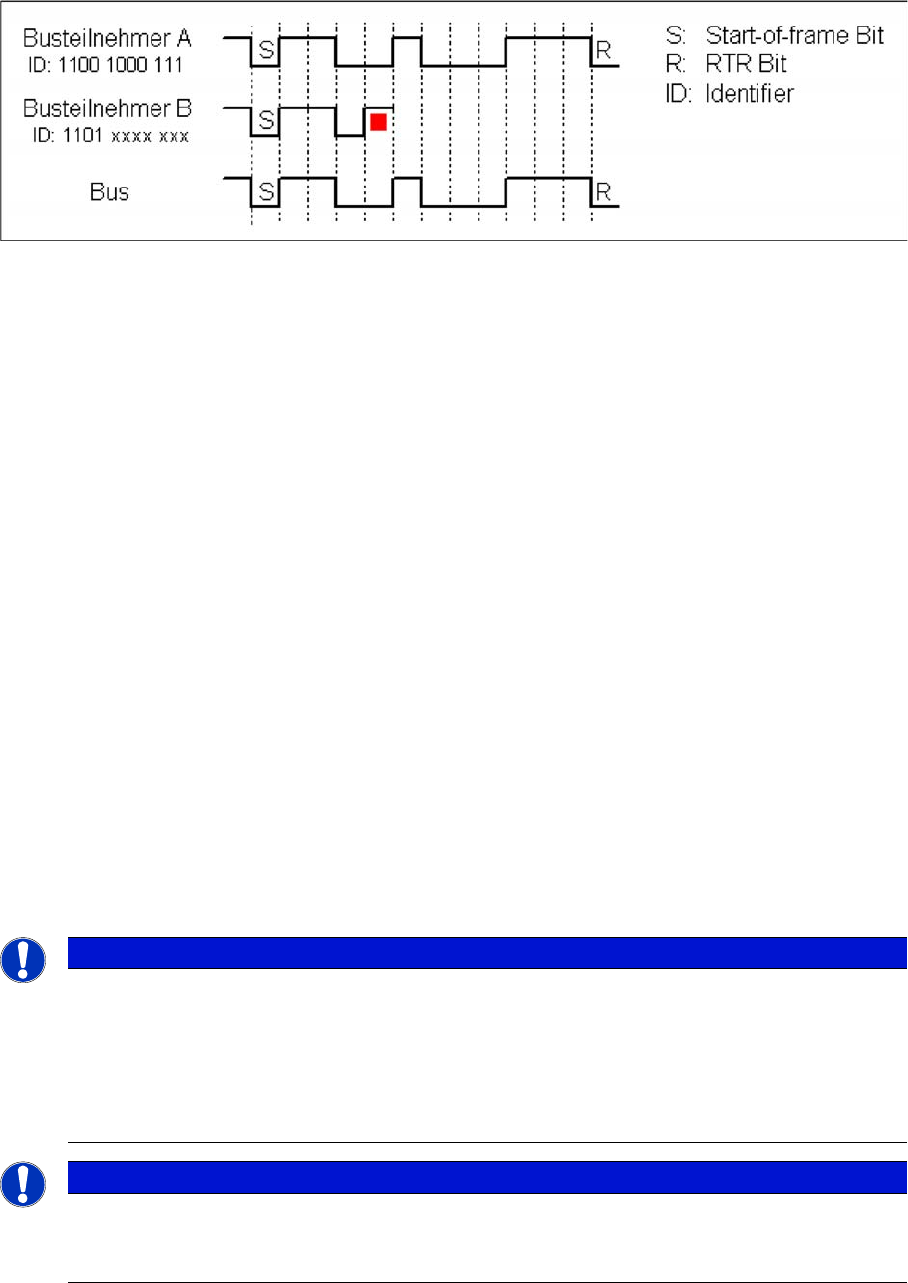
CAN-Bus Arbitrierung Beispiel
Haben Busteilnehmer A und B einen Sendewunsch, so beginnen sie nach Start-of-frame Bit zu senden
und vergleichen jeweils gesendetes und empfangenes Bit. Da "0" auf dem Bus dominiert, erkennt
Busteilnehmer B hier beim vierten Bit einen Unterschied zum gesendeten Bit und zieht sich vom Bus bis
zum nächsten Start-of-frame zurück. Busteilnehmer A erkennt keinen Unterschied und sendet weiter.
Nachrichten mit hoher Priorität haben also einen Identifier, der mit vielen "0" beginnt.
Es existieren zwei Buszustände während der Arbitrierung: dominant und rezessiv.
Fehler auf dem CAN-Bus
4.3.2.3 Fehler auf dem CAN-Bus
Error Frames
▪ Was sind Error Frames?
Error Frames werden von den einzelnen Subsystemen gesendet, wenn ein Kommando nicht der
Kodiervorschrift entspricht oder physikalisch zerstört wurde. D. h. wenn in einem CAN-Telegramm
6 oder mehr Bits hintereinander den gleichen Pegel High oder Low aufweisen.
Wird so ein Kommando von einem Teilnehmer erkannt informiert er sofort die anderen Teilnehmer
und den Absender des Telegramms, indem er einen Error Frame sendet.
Durch den Empfang eines Error Frames verwerfen alle Teilnehmer die empfangene Nachricht und
beginnen ebenfalls einen Error Frame zu senden.
Wenn der Bus wieder frei ist, wird das Kommando erneut gesendet.
▪ Eine Häufung von Error Frames deutet auf physikalische Busfehler hin. Werden zu viele Error
Frames während des Betriebes erkannt, ist eine detaillierte Analyse der CAN-Signale notwendig.
CAN-Bus-Struktur
4.3.3 CAN-Bus-Struktur
HINWEIS
► Bei SIPLACE X-Maschinen ist der Maschinencontroller ein Box PC. In diesem befindet sich
die COM-Baugruppe.
► Bei Maschinen ab ca. 2008 entfällt die Beleuchtungsteuerung, da diese in die stationären
Kameras ab Version 04 integriert ist. Die Ansteuerung des PPWs und die Überwachung der
Sensoren erfolgt über den CAN-Knoten. Somit ist der PPW wieder im CAN-Bus
eingebunden.
HINWEIS
X-Serie/X4I mit SW 702
An diesen Maschinen übernimmt der erste BoxPC die Steuerung der gesamten Maschine. Der
zweite BoxPC dient hier als Visionrechner.
Kommunikation und Steuerung
CAN-Bus CAN-Bus-Struktur
93 Student Guide SIPLACE X-Serie und X4I FSE
CAN-Bus-Struktur SIPLACE X2
4.3.3.1 CAN-Bus-Struktur SIPLACE X2
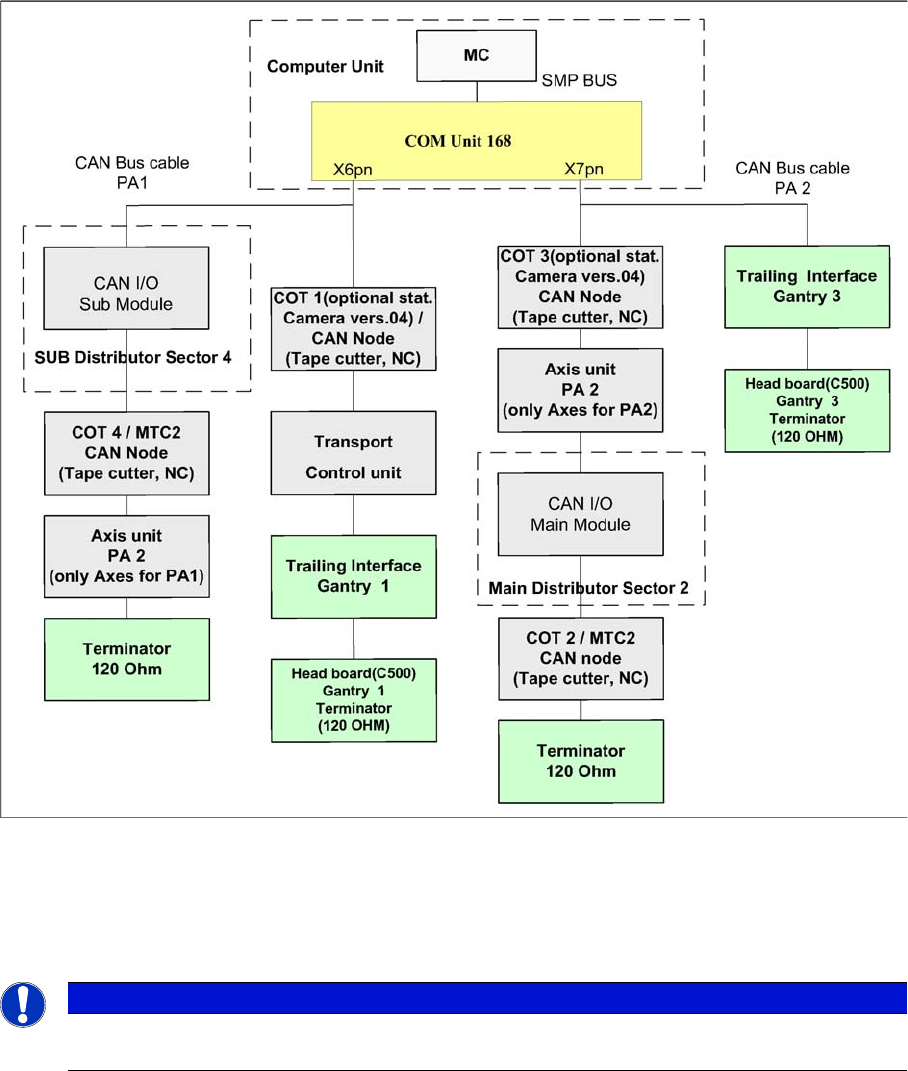
Gesamtübersicht CAN-Bus X2
Der Bestückautomat SIPLACE X2 verwendet zwei Bussysteme mit einer
Datenübertragungsgeschwindigkeit von 1 MBit/s. Das CAN-Bus-System beginnt an den
Kommunikationsbaugruppen und ist in 2 Pfade unterteilt. Jeder Pfad endet mit einem 120 Ohm
Abschlusswiderstand an der Kopfplatine des jeweiligen Bestückkopfes.
HINWEIS
Wenn ein TwinHead installiert ist, muss der Schalter für den Abschlusswiderstand auf der
Kopfplatine (C500) auf OFF stehen.
Kommunikation und Steuerung
CAN-Bus-Struktur CAN-Bus
Student Guide SIPLACE X-Serie und X4I FSE 94
CAN-Bus-Struktur SIPLACE X3
4.3.3.2 CAN-Bus-Struktur SIPLACE X3
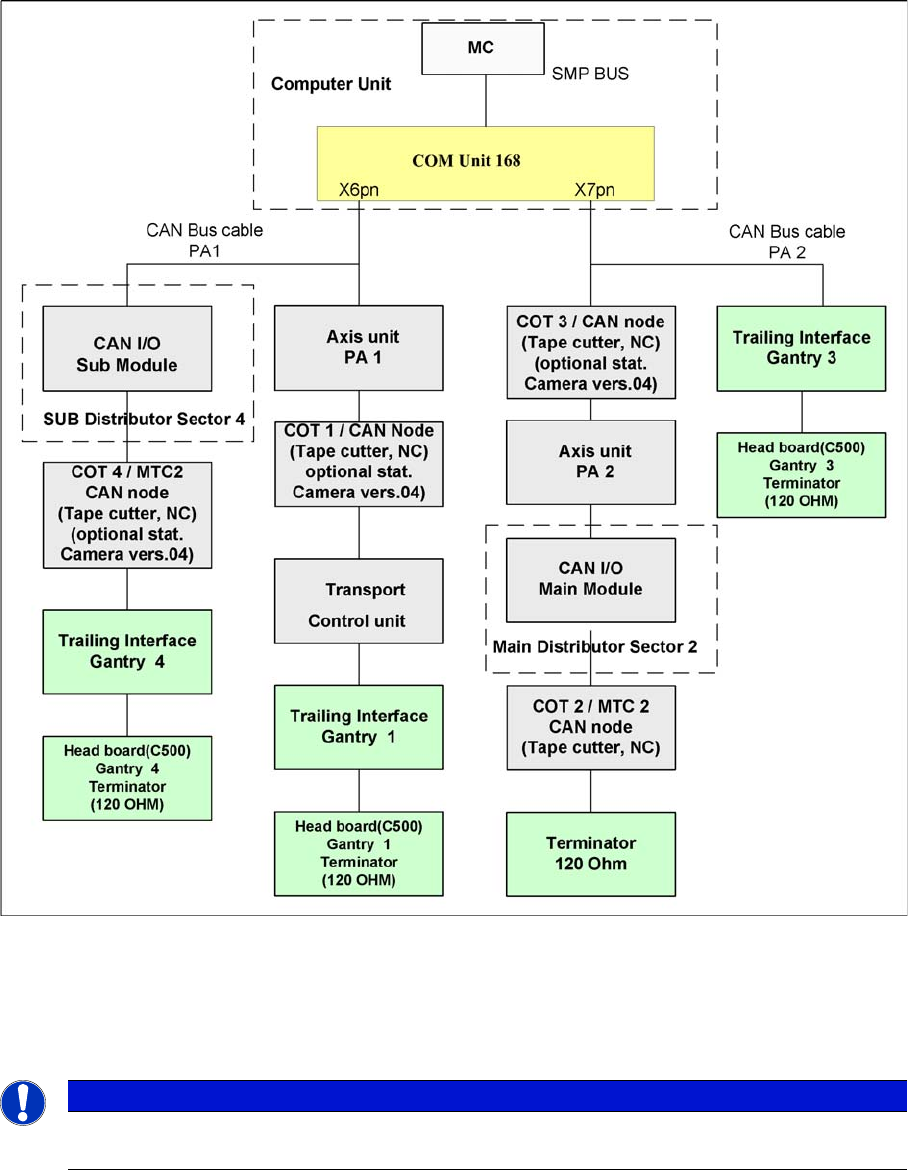
Gesamtübersicht CAN-Bus-Struktur X3
Der Bestückautomat SIPLACE X3 verwendet ein Bussystem mit einer
Datenübertragungsgeschwindigkeit von 1 Mbit/s. Das CAN-Bus-System beginnt an der
Kommunikationsbaugruppe und ist in 2 Pfade unterteilt. Jeder Pfad endet mit einem 120 Ohm
Abschlusswiderstand an der Kopfplatine des jeweiligen Bestückkopfes.
HINWEIS
Wenn ein TwinHead installiert ist, muss der Schalter für den Abschlusswiderstand auf der
Kopfplatine (C500) auf OFF stehen.