FX-1 使用说明书.pdf - 第528页
第 8 章 生产 測定動作(部品とレーザ高さの位置 関係) 開始点:現在高さ位置 方向 :上下交互 ノズル 部品 レーザ高さ ①②③④⑤⑥⑦⑧⑨ 位置 開始点:現在高さ 方向 :上方向 ノズル 部品 レーザ高さ ①②③④⑤ ノ 開始点:現在高さ位置 方向 :下方向 ズル 部品 レーザ高さ ①②③④⑤ 開始点:部品下面- > 部品吸着面 方向 :--- ノズル 部品 レーザ高さ ① ( 測 定 前 ) ②③④⑤⑥ ノズル 開始点:部…
第 8 章 生产
8.5.1.1 激光高度检查的检查方式
用元件数据中设置的激光高度值,实行激光定心的一系列控制,检查是否不发生错误。
另外在单独检查模式中,可指定任意的高度、或测量后的激光高度值进行检查。
8.5.1.2 激光高度测量方式
在连续检查中发生错误时,应转为单独检查模式。用单独检查模式可测量激光高度。
在下述条件范围内反复检查激光高度,把可以进行定心的激光高度,作为最适宜的激光高度。
表 8.5-2 反复侧量激光高度的范围
项目 开始点 方向 内容
上下交互 从当前位置开始上下交互连续检查。
上方向 从当前位置开始只向上方连续检查。
1 当前高度位置
下方向 从当前位置开始只向下方连续检查。
2 元件吸取面 -> 元件下面 以元件高度为基准,从元件吸取面开始到上面连
续检查。
3 元件下面 -> 元件吸取面 以元件高度为基准,从元件下面开始到吸取面连
续检查。
8-111
第 8 章 生产
測定動作(部品とレーザ高さの位置関係)
開始点:現在高さ位置
方向 :上下交互
ノズル
部品
レーザ高さ
①②③④⑤⑥⑦⑧⑨
位置開始点:現在高さ
方向 :上方向
ノズル
部品
レーザ高さ
①②③④⑤
ノ
開始点:現在高さ位置
方向 :下方向
ズル
部品
レーザ高さ
①②③④⑤
開始点:部品下面->部品吸着面
方向 :---
ノズル
部品
レーザ高さ
①(測定前)②③④⑤⑥
ノズル
開始点:部品吸着面->部品下面
方向 :---
部品
レーザ高さ
①(測定前)②③④⑤⑥
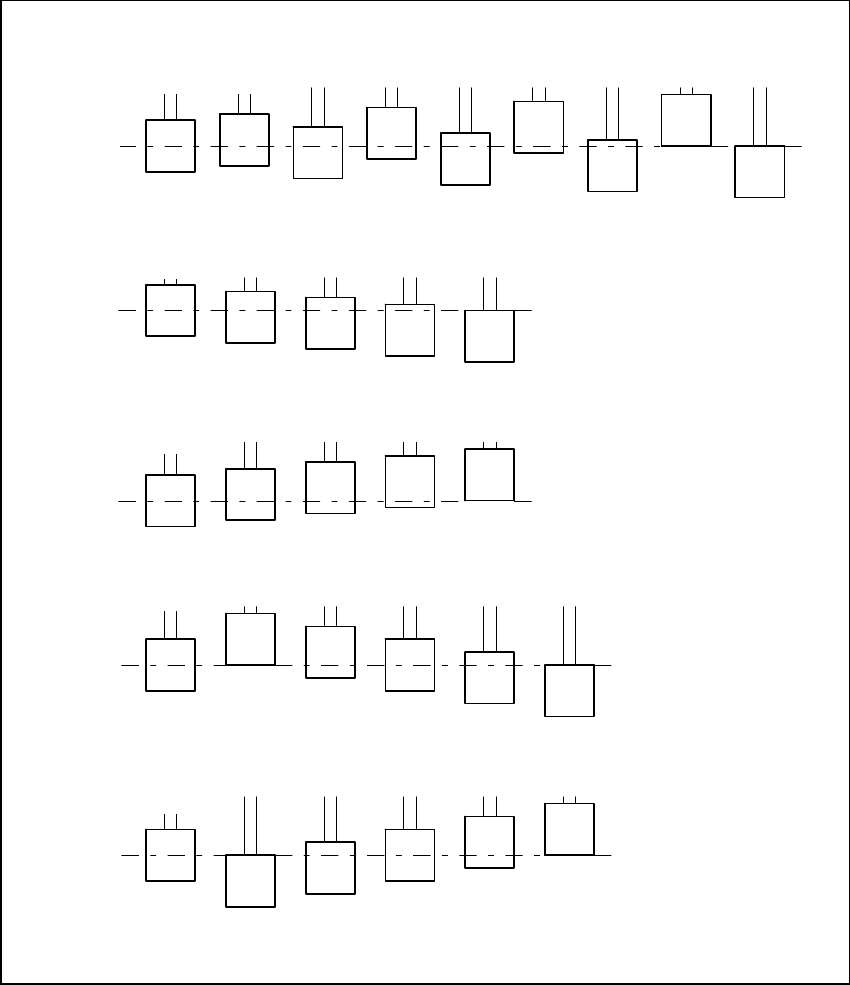
开始点:当前高度位置
方向 :上下方向交替
吸嘴
开始点:当前高度位置
方向 :上方向
吸嘴
元件
激光高度
测量操作(元件与激光高度的位置关系)
元件
激光高度
吸嘴
方向 :下方向
开始点:当前高度位置
激光高度
元件
吸嘴
方向 :---
开始点:元件下面->元件吸取面
元件
激光高度
①(测量前)
吸嘴
方向 :---
开始点:元件吸取面->元件下面
元件
激光高度
①(测量前)
图 8.5-3 反复测量激光高度的范围
8-112
第 8 章 生产
8.5.1.3 激光高度检查/实行测量时的各种运行
① 吸取时使用的贴片头
吸取用的贴片头是自动选择的。以已安装完吸嘴的为优先,使用尽可能少交换吸嘴的贴片头。
根据吸嘴的安装状况,每次测量时,贴片头可能有所不同。
② 检查后的元件归还
元件检查后,有两种情况,有的归还原位置,有的则废弃。是归还,还是废弃,决定于包装
方式。处理的条件,请参见下表。
废弃场所,要在元件数据的[元件废弃]里设置。废弃方法设置为[元件保护]的,按设置进行
废弃。
1mm 以下的元件,归还时有可能发生元件站立、翻面的情况,可根据对话框的询问选择处理。
表 8.5-3 元件归还/废弃条件
包装方式 条件1 条件 2 归还 废弃
32mm
送料器
○
外形尺寸宽度 1mm 以下 询问
*1
带状
以外
外形尺寸宽度 1mm 以上 ○ ○
*2
外形尺寸宽度 1mm 以下 询问
*1
散装
外形尺寸宽度 1mm 以上 ○ ○
*2
管状 ○
・ *1 显示对话框,选择元件归还或废弃。
连续测量时在开始前询问。
・ *2 废弃方法为 [元件保护]时,进行废弃。
③ 选择吸取及供给装置
同一元件有多个供给装置 (吸取数据)时,默认为从最初输入的数据开始吸取元件。单独检查
时可变更供给装置。
④ 变更吸取坐标
不能顺利吸取时,可以用手工输入或用 HOD 装置进行示教,变更吸取坐标。
⑤ 手动吸取
没有吸取数据时,可手动将元件安装到吸嘴上。
在这种情况下,则无法输入吸取坐标,也无法操作送料器。
8-113