00193924-03.pdf - 第126页
3 Da ti tec nic i Manuale per l'uso S IPLACE serie HF 3.7 Teste di montaggio Versione software SR. 50x.xx E dizione 01/2006 IT 126 Æ La testa Colle ct&Place a 6 segm enti poss iede tre assi: l 'asse DR o a …
Manuale per l'uso SIPLACE serie HF 3 Dati tecnici
Versione software SR.50x.xx Edizione 01/2006 IT 3.7 Teste di montaggio
125
3.7.3.1 Descrizione
Anche la testa Collect&Place a 6 segmenti funziona in base al principio Collect&Place. Con il
modulo Vision standard CO, il dispositivo automatico HF monta componenti dalla lunghezza de-
gli angoli di 32 mm non solo precisamente, ma anche molto velocemente. Il suo uso è quindi
consigliabile quando vi sono numeri notevoli di IC nei prodotti da produrre. proprio nell'area prin-
cipale d'applicazione dai PLCC 44 ai QFP 208 si ha un notevole aumento delle prestazioni. 3
Con l'aiuto del modulo Vision DCA, la testa Collect&Place a 6 segmenti può centrare otticamente
e montare componenti di dimensioni 0,6 mm x 0,3 mm fino a 13 mm x 13 mm. Il modulo Vision
DCA ottimizza la velocità e la precisione di componenti High-Speed-Flip-Chips e Bare-Die. Tro-
verete i valori nella tabella di pagina 127
. 3
Funzioni di controllo e di selflearning 3
Le funzioni di controllo e di selflearning descritte a pagina 120 per la testa Collect&Place a 12 seg-
menti riguardano anche la testa Collect&Place a 6 segmenti. 3
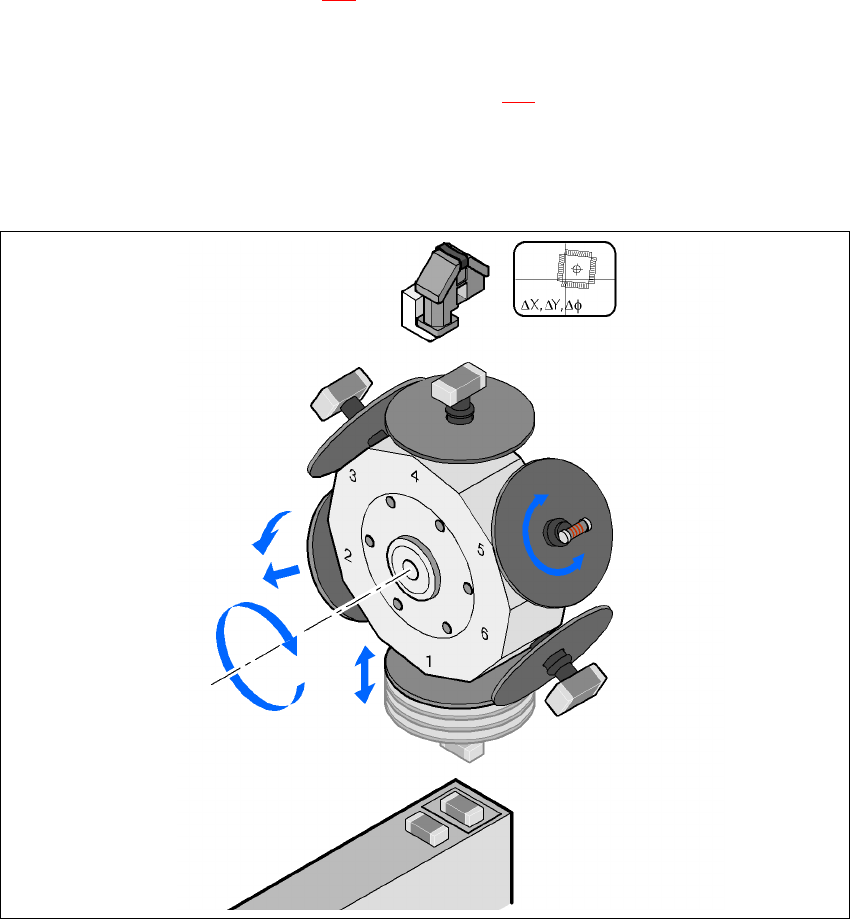
3.7.3.2 Descrizione del funzionamento
3
Fig. 3.7 - 8 Descrizione del funzionamento
Videocamera CO
Asse DP
Ruotare il CO alla
posizione di montaggio
Estrarre o
inserire la bussola
Asse Z
Prelevare o
montare il CO
Asse a stella
Rotazione della
stella
Scartare il CO
3 Dati tecnici Manuale per l'uso SIPLACE serie HF
3.7 Teste di montaggio Versione software SR.50x.xx Edizione 01/2006 IT
126
Æ La testa Collect&Place a 6 segmenti possiede tre assi: l'asse DR o a stella, l'asse Z e l'asse
DP.
Æ La stella ruota con i suoi 6 segmenti attorno all'asse a stella. I segmenti portano le bussole.
Su ogni bussola è collocata una pipetta, con la quale vengono aspirati i componenti e traspor-
tati dalla posizione di prelievo/montaggio (1) alla posizione di scarto (2), alla posizione di cen-
traggio ottico (4) o alla posizione di rotazione (5).
Æ L'asse Z esegue un movimento verticale. Ogni bussola che si trova nella posizione più bassa
della stella (1) viene sollevata o abbassata da quest'asse. In questo modo i componenti ven-
gono prelevati dai caricatori e depositati sul circuito stampato. L'asse Z è un cosiddetto "asse
intelligente": è in grado di "ricordare" l'altezza di prelievo di ogni traccia del caricatore e l'al-
tezza di montaggio di ogni componente. Così si può accelerare il processo di montaggio. La
forza d'appoggio programmata rimane costante.
Æ L’asse DP ruota il componente centrato otticamente alla posizione di montaggio desiderata.
I movimenti degli assi di rotazione ed anche di traslazione vengono azionati da comandi ad
anello chiuso. I sensori della posizione e velocità trasmettono i valori attuali dei movimenti
degli assi ai comandi degli assi. Dal confronto dei valori nominali e reali vengono calcolati i
parametri di forza e velocità per i servoamplificatori e quindi il movimento degli assi da ese-
guire. I valori del vuoto della pipetta vengono controllati elettronicamente costantemente du-
rante l'intero processo di prelievo e montaggio per tenere al minimo la frequenza degli errori
di montaggio.
Manuale per l'uso SIPLACE serie HF 3 Dati tecnici
Versione software SR.50x.xx Edizione 01/2006 IT 3.7 Teste di montaggio
127
3.7.3.3 Dati tecnici
3
3
*) Ricordare che la gamma di componenti CO montabili viene influenzata anche dalle geometrie Pad, dagli standard
specifici del cliente e dalle tolleranze d'imballaggio dei CO.
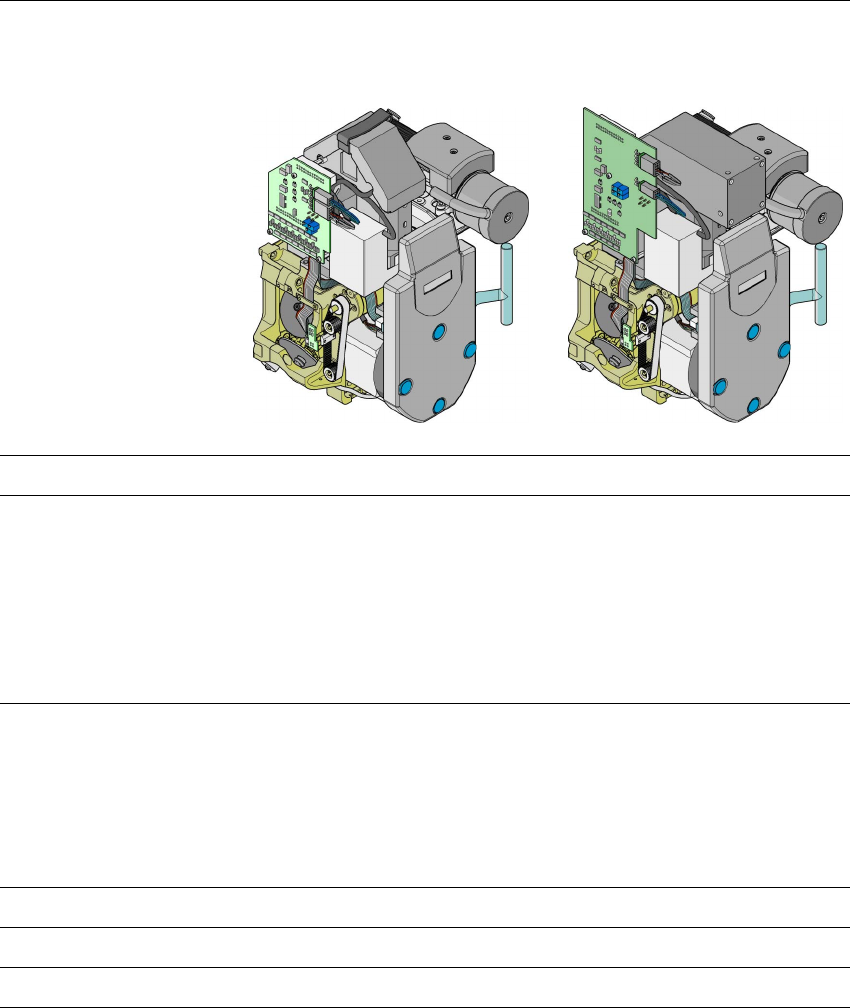
Testa Collect&Place da
6 segmenti con videocamera CO
standard (39x39)
Testa Collect&Place da
6 segmenti con
videocamera DCA
Gamma di componenti *) 0603 a 32 x 32 mm² 0201 a Flip-Chip, Bare Die
Specifiche CO
Altezza max.
Reticolo min. piedini
Reticolo min. Ball
Diametro ball min.
Misure min.
Misure max.
Peso max.
8,5 mm
0,5 mm
0,56 mm
0,32 mm
1,6 x 0,8 mm²
32 x 32 mm²
5 g
8,5 mm
0,4 mm
0,2 mm
0,11 mm
0,6 x 0,3 mm²
13 x 13 mm²
5 g
Livello di potenza
programmato
1
2
3
4
5
Forza d'appoggio programmata [N]
2,4 ± 0,5
2,4 ± 0,5
3 + 1
4 + 1
5 + 1
Tipi di pipette 8xx, 9xx 8xx, 9xx
Precisione X/Y ± 45 µm/3 σ, ± 60 µm/4 σ ± 41 µm/3 σ, ± 55 µm/4 σ
Precisione angolare ± 0,2°/3 σ, ± 0,3°/4 σ ± 0,2°/3 σ, ± 0,3°/4 σ