00193924-03.pdf - 第130页
3 Da ti tec nic i Manuale per l'uso S IPLACE serie HF 3.7 Teste di montaggio Versione software SR. 50x.xx E dizione 01/2006 IT 130 L’ asse DP ruota il compone nte cen trato otti cament e alla po sizion e di montag g…

Manuale per l'uso SIPLACE serie HF 3 Dati tecnici
Versione software SR.50x.xx Edizione 01/2006 IT 3.7 Teste di montaggio
129
3.7.4.1 Descrizione
Questa testa di montaggio estremamente avanzata è formata da due teste di montaggio accop-
piate dello stesso tipo (testa gemella) che funzionano in base al principio Pick&Place. La
TwinHead è particolarmente adatta ad operare con elementi particolarmente grandi e difficili. Due
componenti vengono prelevati dalla testa di montaggio, centrati otticamente mentre vengono tra-
sportati alla posizione di montaggio e ruotati alla posizione di montaggio necessaria. Con l'aiuto
di un getto d'aria, vengono poi depositati delicatamente ed alla posizione esatta sul circuito stam-
pato. 3
Per la TwinHead sono state create nuove pipette (tipo 5xx). Con un adattatore si possono però
usare anche le pipette della testa Pick&Place del tipo 4xx e le pipette delle teste Collect&Place di
tipo 8xx e 9xx. 3
Funzioni di controllo e di selflearning 3
Diverse funzioni di controllo e selflearning aumentano l'affidabilità della TwinHead. 3
– I controlli del vuoto nelle pipette indicano per esempio se il componente è stato prelevato o
depositato correttamente.
– Moduli Vision ad alta risoluzione ed intelligenti, come, p.e. i moduli Fine-Pitch e flip-chip indi-
viduano le più piccole differenze della posizione del CO, la correggono e garantiscono quindi
una posizione corretta di montaggio. Le videocamere CO sono fissate stazionariamente al
telaio della macchina.
– Viene controllata anche la forma dell'involucro del componente. Se i dati geometrici calcolati
sono diversi da quelli programmati, il componente non viene montato.
– Le forze d'appoggio prestabilite per i componenti vengono misurate e controllate da un sen-
sore di potenza.
– In caso di mancanza di aria compressa o corrente, l'asse verticale (asse Z) viene sollevato
ad una posizione sicura per evitare lo scontro della testa.
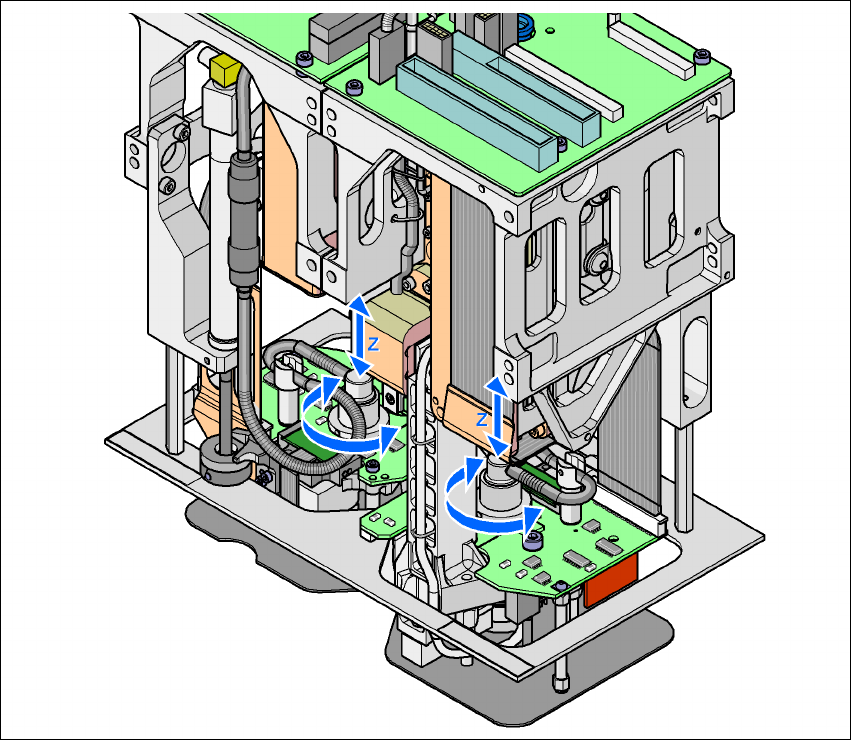
3.7.4.2 Descrizione del funzionamento
La TwinHead è formata da due teste accoppiate Pick&Place con comandi completamente sepa-
rati l'uno dall'altro. Ogni testa possiede due assi, l'asse Z e l'asse DP (vedi Fig. 3.7 - 8
). 3
Il percorso di spostamento dell'asse Z viene registrato con un sistema di misurazione incremen-
tale lineare ad alta risoluzione. L'asse Z esegue un movimento verticale. Un motore lineare sol-
leva ed abbassa l'asse Z. In questo modo vengono prelevati componenti dai caricatori o tray e
vengono abbassati sul circuito stampato. L'asse Z è un cosiddetto "asse intelligente": è in grado
di "ricordare" l'altezza di prelievo dei caricatori e tray e l'altezza di montaggio di ogni compo-
nente. Così si può accelerare il processo di montaggio. La forza d'appoggio programmata viene
misurata e controllata da un sensore di potenza. 3
3 Dati tecnici Manuale per l'uso SIPLACE serie HF
3.7 Teste di montaggio Versione software SR.50x.xx Edizione 01/2006 IT
130
L’asse DP ruota il componente centrato otticamente alla posizione di montaggio desiderata.
L'asse di rotazione è azionato da un motore a passi. L'albero del motore ha la forma di un tubo
della bussola All'estremità superiore è fissato il disco incrementale per l'analisi degli angoli,
all'estremità inferiore si trova il dispositivo di accettazione della pipetta. 3
I movimenti degli assi di rotazione ed anche di traslazione vengono azionati da comandi ad anello
chiuso. I sensori della posizione e velocità trasmettono i valori attuali dei movimenti degli assi ai
comandi degli assi. Dal confronto dei valori nominali e reali vengono calcolati i parametri di forza
e velocità per i servoamplificatori e quindi il movimento degli assi da eseguire. 3
I valori del vuoto della pipetta vengono controllati elettronicamente costantemente durante l'intero
processo di prelievo e montaggio per tenere al minimo la frequenza degli errori di montaggio. 3
3
Fig. 3.7 - 10 Descrizione del funzionamento
3
Manuale per l'uso SIPLACE serie HF 3 Dati tecnici
Versione software SR.50x.xx Edizione 01/2006 IT 3.7 Teste di montaggio
131
3.7.4.3 Dati tecnici
3
3
3
*) Ricordare che la gamma di componenti CO montabili viene influenzata anche dalle geometrie Pad, dagli standard
specifici del cliente e dalle tolleranze d'imballaggio dei CO.
**) Se si usano pipette standard
Centraggio ottico con Videocamera CO, stazionaria,
P&P (tipo 22) 50 x 40
Videocamera CO, stazionaria,
P&P (tipo 20) 8 x 8
Gamma di componenti *) Da 0603 a SO, PLCC, QFP, BGA,
CO speciali, Bare Die, Flip-Chip
Da 0201 a SO, PLCC, QFP, zoccoli,
prese, BGA, CO speciali, Bare Die,
Flip-Chip, Shield
Specifiche CO
Altezza max.
Reticolo min. piedini
Reticolo min. Ball
Diametro ball min.
Misure min.
Misure max.
Peso max.
25 mm (più alte su richiesta)
0,4 mm
0,56 mm
0,32 mm
1,6 x 0,8 mm²
50 x 40 mm² (misurazione semplice)
In caso di funzionamento con due
pipette:
50 x 50 mm² o
69 x 10 mm ²
In caso di funzionamento con una
pipetta:
85 x 85 mm² o
125 x 10 mm²
Max. 200 x 125 mm² (con limiti)
100 g **)
25 mm (più alte su richiesta)
0,25 mm
0,14 mm
0,08 mm
0,6 x 0,3 mm²
8 x 8 mm² (misurazione semplice)
100 g **)
Forza d’appoggio
programmabile
1,0 N - 15 N 1,0 N - 15 N
Tipi di pipette 5 xx (standard)
4 xx + adattatore
8 xx + adattatore
9 xx + adattatore
5 xx (standard)
4 xx + adattatore
8 xx + adattatore
9 xx + adattatore
Distanza tra le pipette delle
due teste Pick&Place
70,8 mm 70,8 mm
Precisione X/Y ± 26 µm / 3 σ, ± 35 µm / 4 σ ± 22 µm / 3 σ, ± 30 µm / 4 σ
Precisione angolare ± 0,05° / 3 σ, ± 0,07° / 4 σ ± 0,05° / 3 σ, ± 0,07° / 4 σ