7OM-1602-004_w.pdf - 第114页
7OM-1602 第三章 1. 维护菜单 3-1 1 1008-002 [4] 操作对象选择按钮 选择操作对象。 将指定的段移动到料盘拉钩拉出位置。 [5] 动作选择按钮 [ 供料器补给位置移动 ] : 升降机移动到元件补给位置。 [ 储料箱交换位置移动 ] : 升降机移动到储料箱交换位置。 [ 移动到拉出位置 ] : 升降机移动到料盘拉钩拉出位置。 [ 原点复位 ] : 将升降机进行原点复位。 [ 料盘挡板开闭 ] : 打开或关闭料盘…
7OM-1602
3-10
第三章 1. 维护菜单
1103-003
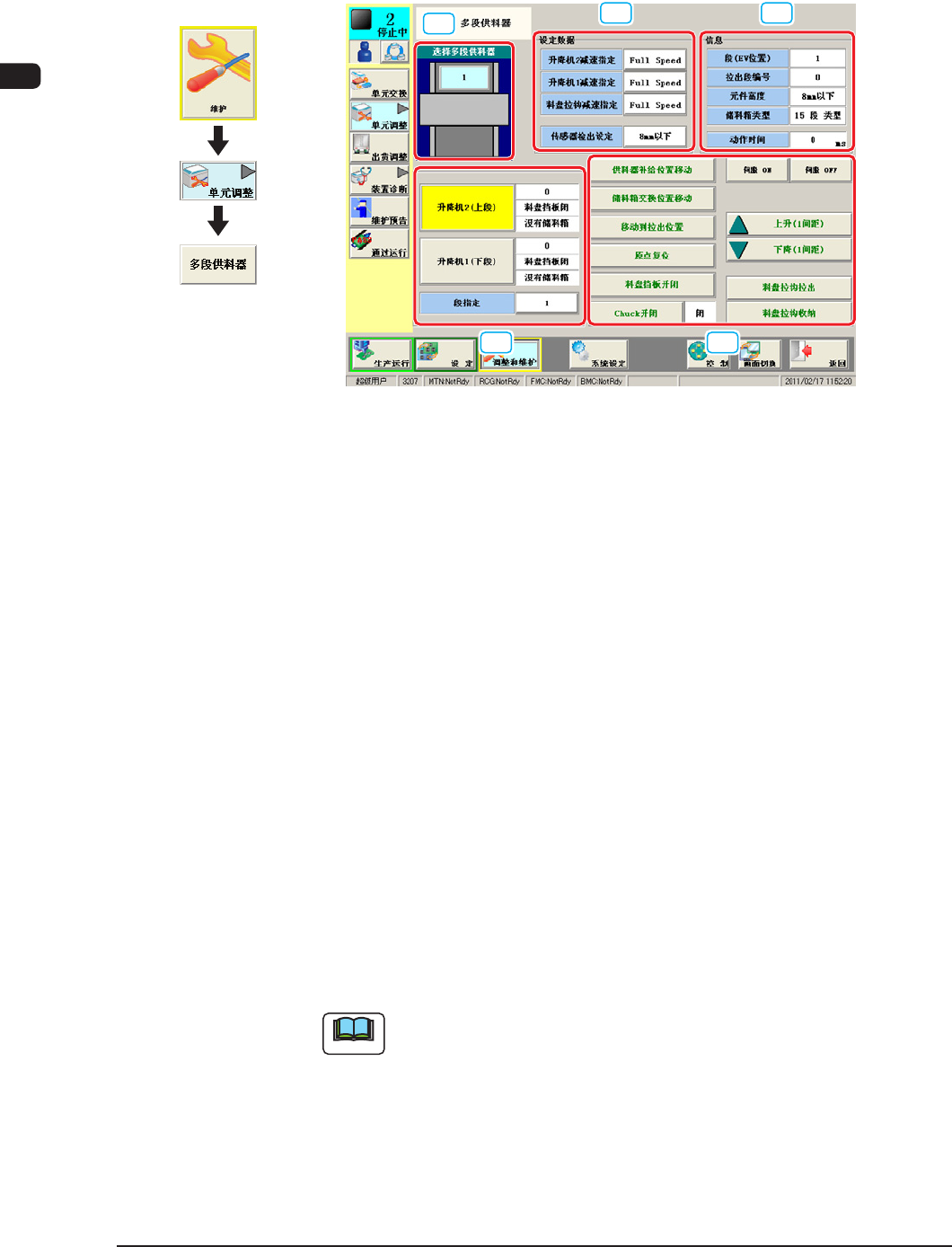
1.3 单元调整
按下单元调整子菜单的 [ 多段供料器 ] 按钮,便显示以下界面。
[1]
[2] [3]
[4] [5]
“
多段供料器调整
”
F7C10
[1] 选择多段供料器
显示被设置的多段供料器并进行选择。
[2] 设定数据
进行多段供料器各部的减速指定、传感器设定。
升降机 2 减速指定 : 进行升降机 2 的减速指定。
升降机 1 减速指定 : 进行升降机 1 的减速指定。
料盘拉钩减速指定 : 进行料盘拉钩的减速指定。
传感器检出设定 : 设定检出托盘上元件高度的水准。
[3] 信息
显示多段供料器上一次进行的信息。
显示项目如下 :
段 (EV 位置 )
拉出段编号
元件高度
储料箱类型
动作时间
Note
设定变更钟的数据不作为信息显示。
界面展开

7OM-1602
第三章 1. 维护菜单
3-11
1008-002
[4] 操作对象选择按钮
选择操作对象。
将指定的段移动到料盘拉钩拉出位置。
[5] 动作选择按钮
[ 供料器补给位置移动 ] : 升降机移动到元件补给位置。
[ 储料箱交换位置移动 ] : 升降机移动到储料箱交换位置。
[ 移动到拉出位置 ] : 升降机移动到料盘拉钩拉出位置。
[ 原点复位 ] : 将升降机进行原点复位。
[ 料盘挡板开闭 ] : 打开或关闭料盘挡板。
[Chuck 开闭 ] : 打开或关闭 Chuck。
[ 伺服 ON] : 接通伺服的电源。
[ 伺服 OFF] : 切断伺服的电源。
[ 上升 (1 间距 )] : 升降机上升托盘的 1 间距。
[ 下降 (1 间距 )] : 升降机下降托盘的 1 间距。
[ 料盘拉钩拉出 ] : 料盘拉钩拉出托盘。
[ 料盘拉钩收纳 ] : 将拉出到料盘拉钩上的托盘收纳。
7OM-1602
3-12
第三章 1. 维护菜单
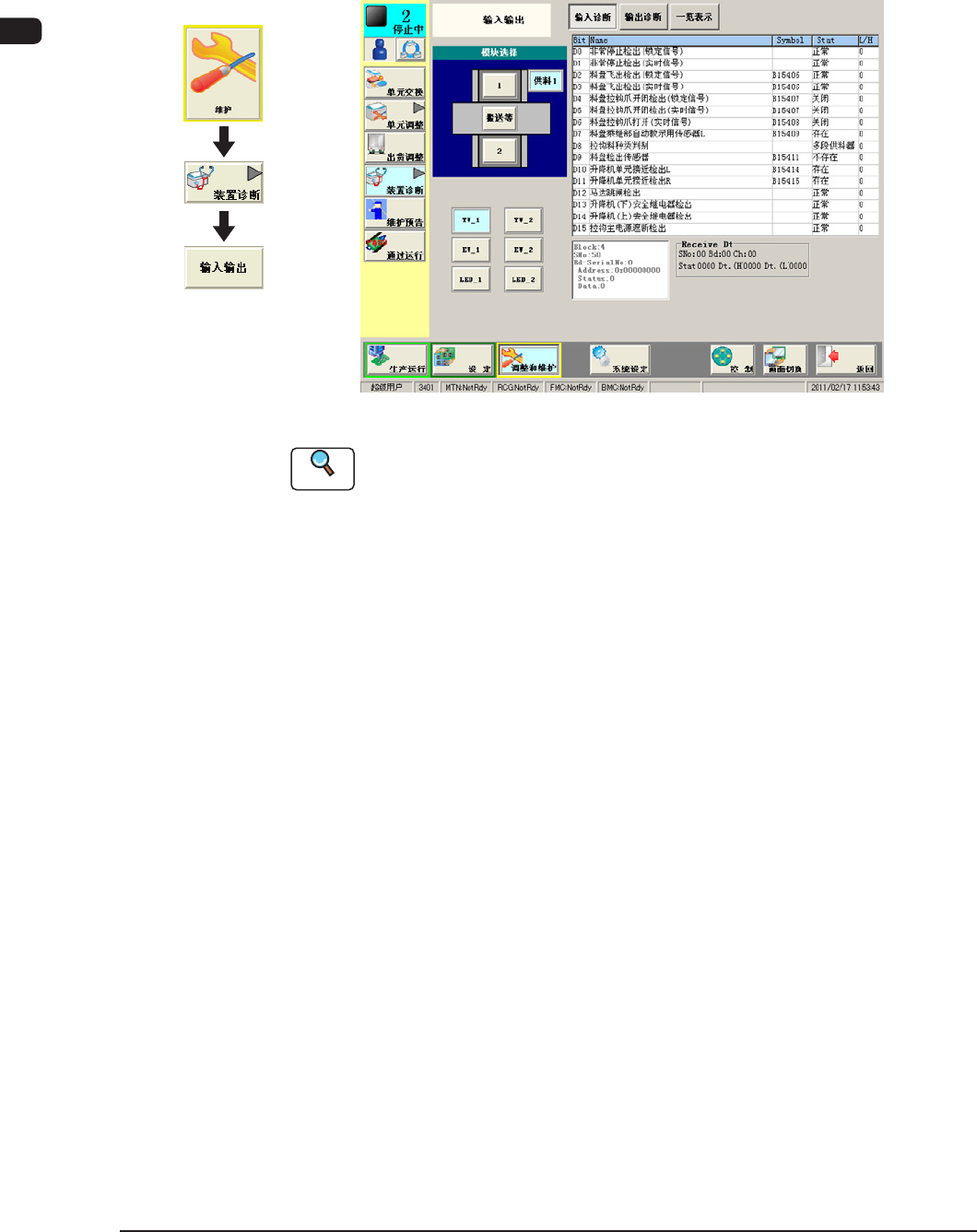
1.4 装置诊断
1.4.1 输入输出
检查各部的输入输出状态。
“
输入输出
”
界面 F7C11
Reference
详细内容请参照
“
第三卷 第一章 6.1 输入输出
”
界面。
1103-003
界面展开