HM_Series_Administrator′s_Guide(Chi_Ver2.5)校正.pdf.pdf - 第157页
3-41 元件的登记 < 详细 > 按钮。 < 详细 > 按钮 针对球的直径、 球间距项各自设定上偏差与 下偏差。 上偏差 : 容许高 于设定值的程度。 下偏差 : 容许低 于设定值的程度。 < 运算法则 > 组合框 选择 BGA 部件 识别算法。 可选择的算法如下。 球形的 只利用 Ball 进行识别。 用于像 PBGA Ball 的区分明确的 BGA 。 球形实体 同时考虑部件本体…

3-40
Cutting-edge Modular Mounter HM Series Administrator's Guide
“Rev.Checker” 类型时球数量一定是单数。
<BGA 旗标(Flag) > 选择框
请选择球的颜色。
White
球显示成白色时选择。
Black
球显示成黑色时选择。
W & B(White and Black)
球的中央呈黑色而外廓呈白色时选择。
< 间距XY> 编辑框
只有在BGA 时才会激活。请输入从球中心沿着X方向到相邻的球中心为
止的距离。
请输入从球中心沿着Y方向到相邻的球中心为止的距离。
如果是“Checker” 或“Rev.Checker”类型,应该把空的部分也视为存在着
球地设定球间隔。
< 分数> 编辑框
分数是一种经过数值化的值,该值表明视觉系统所识别的球形状和已登
记的球实体数据之间的一致程度。
例如,该值为1000时表示完全一致。该值通常设定成600,该值太小时识
别据降低,该值太大时识别结果容易被判定为不良。
< 直径> 编辑框
请输入球的直径。
< 容许误差%> 编辑框
以% 为单位输入即使所识别的元件形状和所登记的元件形状实体之间发
生差异也能接受的程度。
例如,容许误差设定成10%时,如果所登记的形状实体的数据为10而实
际识别的元件形状的数据为11,视觉系统就会把所识别的元件形状判定
为正常。
如果需要按照主要识别参数个别地设定详细的容许误差,请单击右边的
3-41
元件的登记
<详细 > 按钮。
<详细> 按钮
针对球的直径、球间距项各自设定上偏差与下偏差。
上偏差:容许高于设定值的程度。
下偏差:容许低于设定值的程度。
<运算法则>组合框
选择BGA 部件识别算法。可选择的算法如下。
球形的
只利用Ball 进行识别。用于像PBGA Ball 的区分明确的 BGA。
球形实体
同时考虑部件本体(Body) 和Ball。 用于像 CBGA Ball 和本体 很难区
分开的BGA。
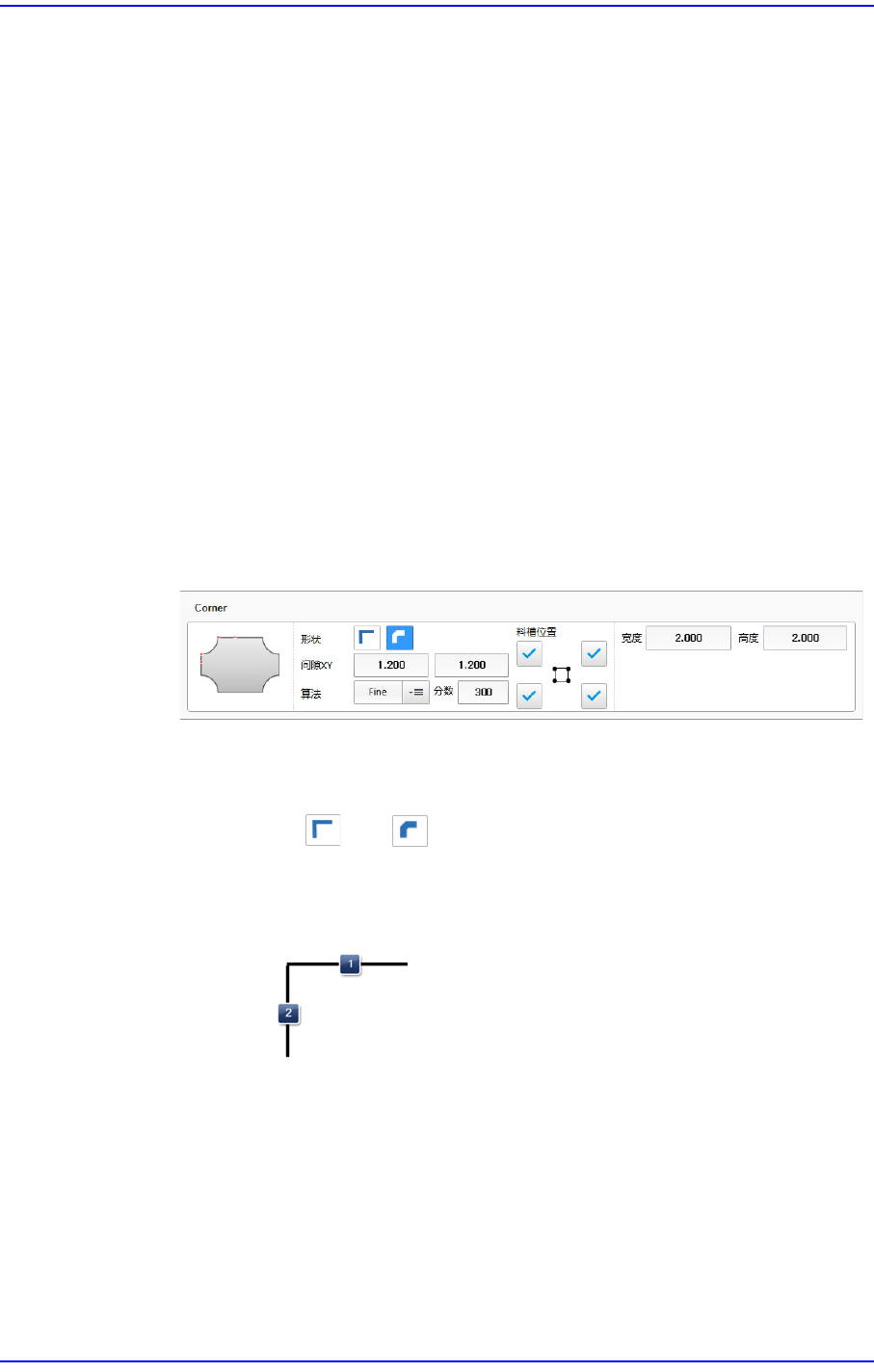
Corner
可以利用定义了角部形状的实体进行编辑及删除。
<形状> 选项框
请选择最相似于实际元件的角部形状的形状。
可以选择 或者 。
形状定义- Corner类型1
1:
角部的
X
长度
2:
角部的
Y
长度
3-42
Cutting-edge Modular Mounter HM Series Administrator's Guide
形状定义- Corner 类型2
1:
角部的
X
长度
2:
角部的
Y
长度
3: Gap Y
的长度
4: Gap X
的长度
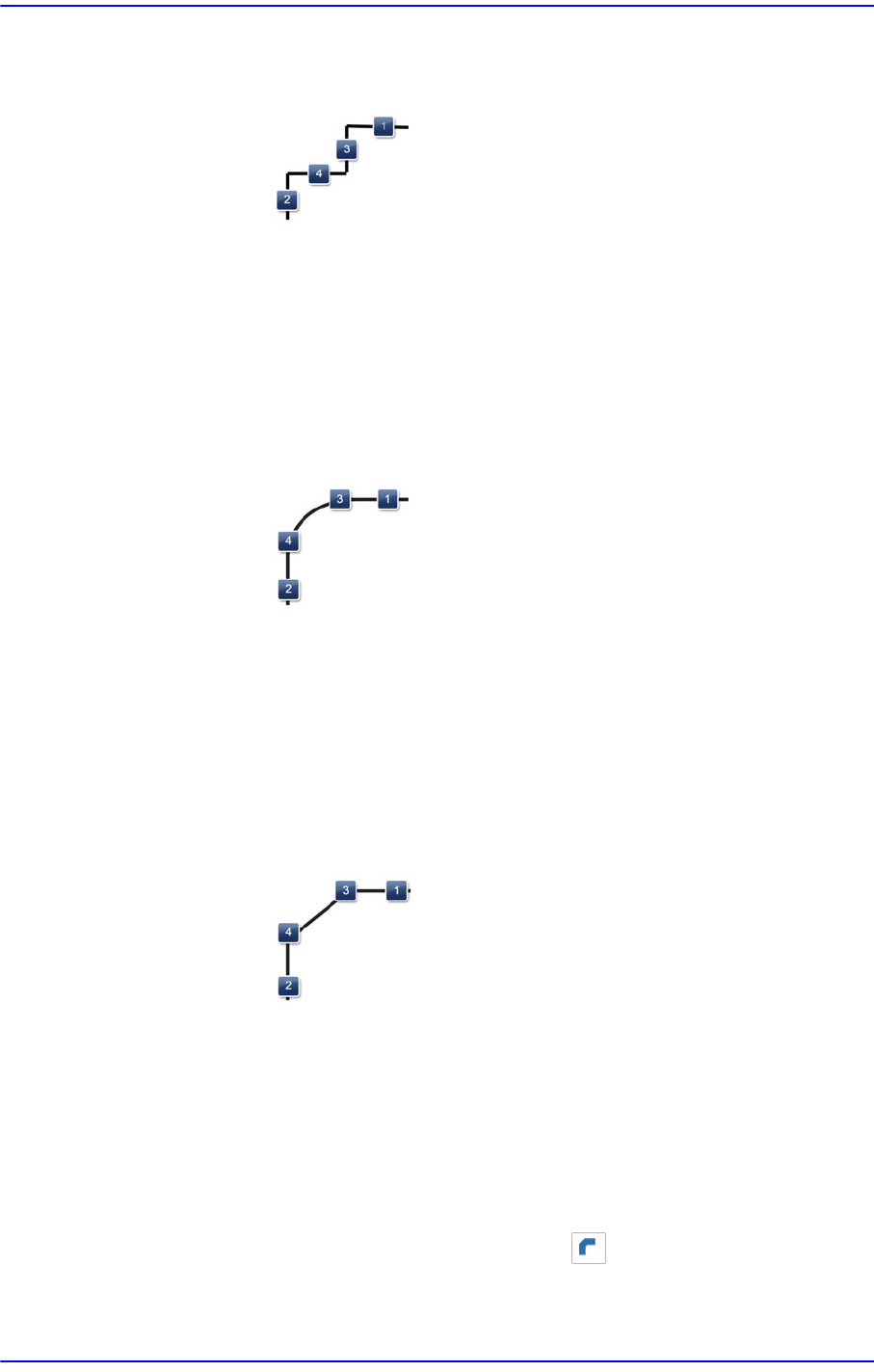
形状定义- Corner 类型3
1:
角部的
X
长度
2:
角部的
Y
长度
3:
圆角开始
X Gap
4:
圆角开始
Y Gap
形状定义- Corner 类型4
1:
角部的
X
长度
2:
角部的
Y
长度
3:
弯曲开始
X Gap
4:
弯曲开始
Y Gap
< 间隙XY> 编辑框
只有在< 形状>群中把角部形状选择为 时才会激活。请输入角部的
X方向及Y方向尺寸。