xp141-241-341-5.0E.pdf - 第214页
XP Proper Data List V1.40 14/11/2002 Item XP141 XP241 XP341 Description Reboot __targetOfst_Y = 0 0 0 Absolute encoder offset value (mm) It is necessary to turn on the power again. Calibrated data l __targetOfst_Z = 0 0 …
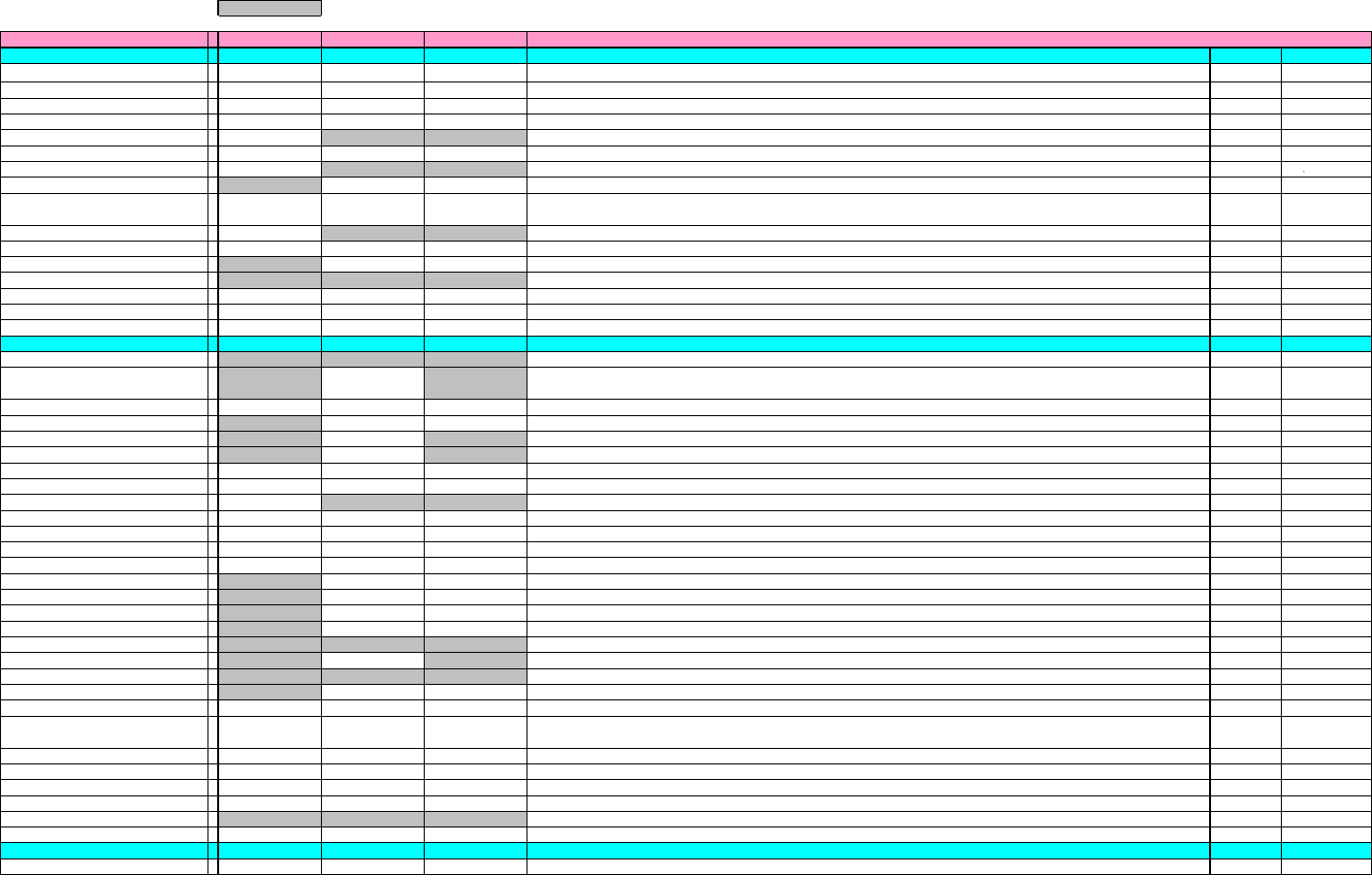
XP Proper Data List V1.40
14/11/2002
//_/_/_/_/_/_/_/ Proper data /_/_/
Not Used
Note:
Items added have been added from V1.30.
Item
XP141
XP241
XP341
Description
Reboot
________MACHINE_TYPE_______
=
0
0
0
l
= reboot
__xpMachineTypeA = 1 2 3 M/C Type [1: XP141, 2: XP241, 3: XP341]
User cannot edit
__xpMachineTypeB
=
4
4
4
M/C Type (Board loading size) [All M/C type: 4]
User cannot edit
__xpMachineTypeC
=
1
1
1
M/C Type [All M/C type: 1] (Not used at present)
User cannot edit
__xpMachineTypeD
=
1
1
1
M/C Type [1: Mass production machine (Ordinary setting), 0: proto-type] (Different I/O is used)
User cannot edit
__xpTI1200A
=
1
0
0
[1: Camera type TI-1200A] (XP141)
User cannot edit
__ServoPulseReduce
=
1
1
1
0: Pn201 = 16384 1: Pn201 = 8192
User cannot edit
__DispMode
=
1
0
0
Display mode [0: No display during Vision processing, 1: Display only overlay, 2: display all] (XP-141E)
User can edit
__CornerRearSide
=
0
2
2
Flag to compensate the value by referring the corner pattern at rear side (XP241E, XP341E)
User cannot edit
l
__PanelReverseFlow = 0 0 0
Specifying the board transference direction: 0: Left to Right 1: Right to Left (only use with a left to right program) 2:
Right to left (it is possible to run with a standard flow program)
User cannot edit
__RevolverInterLock
=
0
0
0
*1 Add Tape leaf check sensor and nozzle raise check sensor [T1.12e, T1.09h] [Setting is changed to "0", in the case, hardware modification is necessary.]
User cannot edit
l
__SmemaFlag
=
0
0
0
SMEMA Flags [0: Standard (FUJI signal), 1: SMEMA spec (in conformity to 1.2)]
User can edit
__Coplanarity
=
0
0
0
Coplanarity function [0: w/o coplanarity 1: w/coplanarity]
User cannot edit
__LightingSystem
=
0
0
0
Not used at present
User cannot edit
__ASSystem
=
0
0
0
Setting for special customize M/C [0: Standard machine (Ordinary setting), 1: w/ special changeover mode]
User cannot edit
l
__ConvOutSensor
=
0
0
0
Out conveyor board arrival check sensor [0: no sensor 1: sensor installed]
User cannot edit
__BackupPlateSensor
=
0
0
0
Backup Plate interference check sensor [0: no sensor 1: sensor installed]
User cannot edit
_________OPERATION_________
=
0
0
0
__BrightLevelArrv
=
0
0
0
*2 Bright level to check the board arrival (valid under __MainStArrvFDChkFlag setting is 1) [ordinary 250]
User cannot edit
__TrayDetectMotion = 0 2 0
Specifying the tray top surface detection check 0: Do not carry out. 1: Carry out automatically when [Ready On] is
pressed. 2: Carry out automatically during tray motion.
User can edit
__GateMotionSwitch
=
0
0
0
Placing mode [0: Enable program settings, 1: Arch motion, 2: Gate motion]
User can edit
__DisposeWaitTime
=
0
100
100
Head stop time before rejecting parts above the reject place (msec)
User cannot edit
__TrayAdsorbTime
=
0
1000
0
Head(w/remover) stop time when it comes at tray pickup position to carry out tray eject (msec)
User cannot edit
__DisposeConvSide
=
0
0
0
[0: Mass production machine (Ordinary setting), 1: Limited mass production machine] (XP241)
User cannot edit
__TapeCutterUseChk
=
0
0
0
Waste tape cutter during automatic operation [0:used 1:not used]
User can edit
__TapeCutterActiveQty
=
1
1
1
Activate waste tape cutter function [0, 1: every time after board is load out. 2~:after every time certain quantities of boards are produced]
User can edit
__ResetCylORTime
=
10
0
0
Timer to activate the Reset cylinder before last placing nozzle is reached to lower limit [T1.12e, T1.09h]
User cannot edit
__PlaceDownEndTimer
=
0
50
50
Lower limit timer during placement (msec)
User cannot edit
__DeviceSetChkUse
=
1
1
1
Parts supply check [0:not used 1:used]
User can edit
__ConvErrTime
=
0
0
0
Arrival check timer for next machine (msec) [0~10000: 10000msec, 10001~: setting time (msec), Upper limit is 60000]
User cannot edit
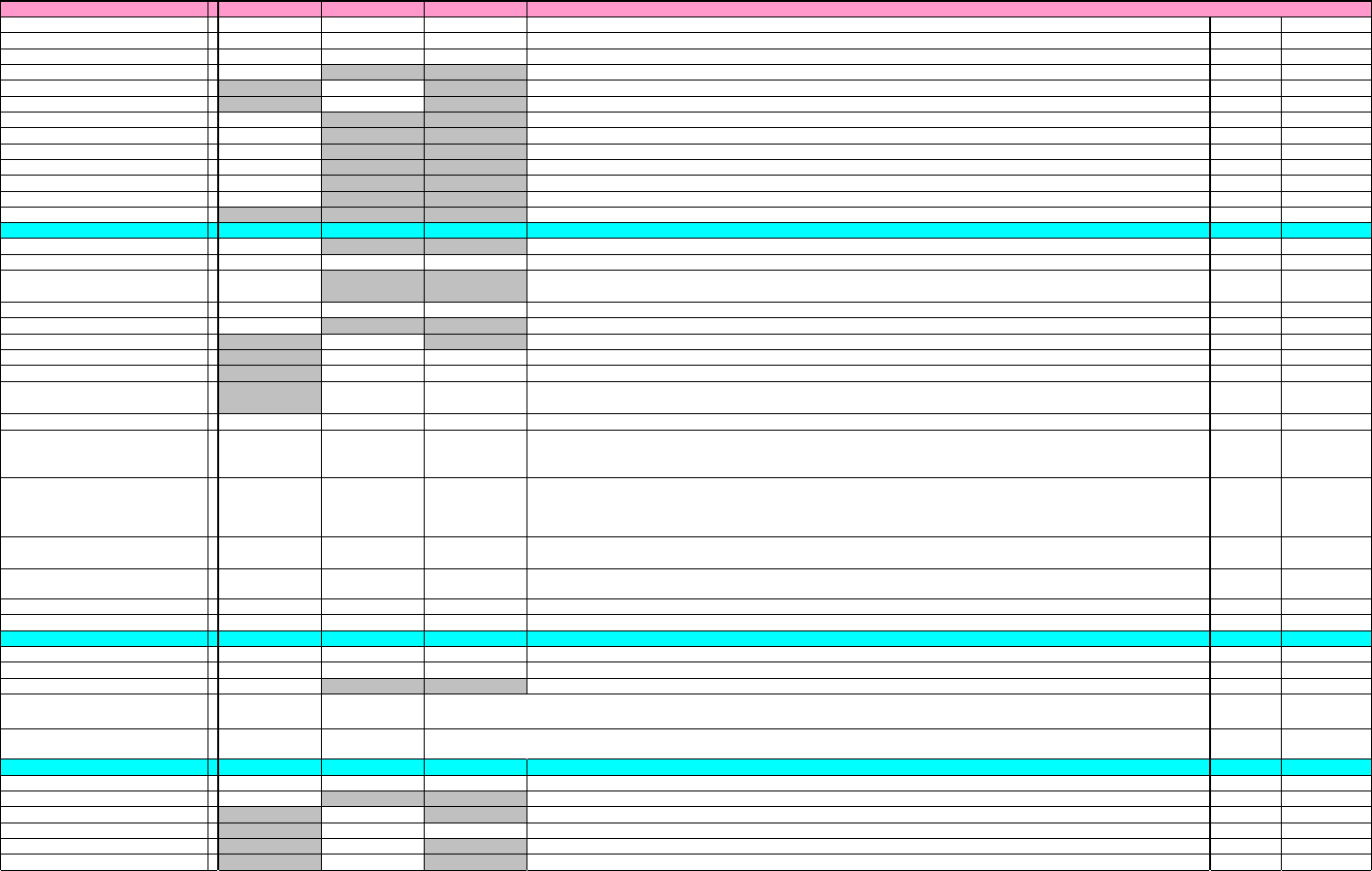
__ConveyerMode
=
1
1
1
Conveyor flow mode [0:standard 2:special (load next board after all boards are load out from m/c)]
User can edit
__PickUpTimerSide1
=
0
50
50
Extend Side1pickup time (msec)
User cannot edit
__PickUpTimerSide2
=
0
100
50
Extend Side2 pickup time (msec)
User cannot edit
__PickVaccumStartTime
=
0
50
50
Parts pickup vacuum start time (Starts vacuuming before it reaches pickup position.) (msec)
User cannot edit
__VacuumDesTime
=
0
70
70
Time of Air blow (msec)
User cannot edit
__VT130ImageProcTwice
=
0
0
0
Not used at present
User cannot edit
__TrayEjectCheck
=
0
2
0
Tray load out check [0:invalid, 1:valid(Old Sensor), 2: valid(New Sensor)]
User cannot edit
l
__DesStartTime
=
0
0
0
Not used at present
User cannot edit
__MultiImageNotDisp
=
0
0
0
Display mode for multi image acquisition [0:Display, 1:Not displaying acquired image during processing (Shorten the process time)]
User can edit
__ConvMtrSpeed
=
340
340
340
Board loading speed [Standard is 340 mm/sec (same as the setting 0)] (Upper limit is 340)
User cannot edit
__BlackMaskLevel = -1 88 88
A function, when the brightness is less than the appointed brightness (at vision processing) assuming it as same
brightness and carry out noise elimination [(-1~255) -1:Auto calibration]
User cannot edit
__PCFtpUse
=
0
0
0
Remote file setting [0:invalid 1:valid]
User can edit
__TemplateFind
=
3
3
3
VT18 template file name search priority [0, 1:Part No. is the priority, 2:Part type is the priority, 3:Referring only part type.]
User can edit
__MainLifterUpEndTimer
=
350
350
350
Lifter raised timer (set it when the vision processing is started before board clamp is completed. Ex. Ceramic PCB) [T1.09e,T1.12c]
User can edit
__FiducialLampOnTimer
=
0
0
0
Lamp on timer (set it when the image is acquired before lighting amount becomes to be enough) [T1.09e,T1.12c]
User can edit
__MainStArrvFDChkFlag
=
0
0
0
*2 Board detect check by mark camera [0:not used 1:use] [T1.12f]
User cannot edit
l
__ThermalOffsetTime
=
0
360
360
Timing of thermal offset. Set to 0 to bypass the thermal offset.
User can edit
_________SERVO_OFST________
=
0
0
0
__targetOfst_X
=
0
0
0
Absolute encoder offset value (mm) It is necessary to turn on the power again.
Calibrated data l
1/10
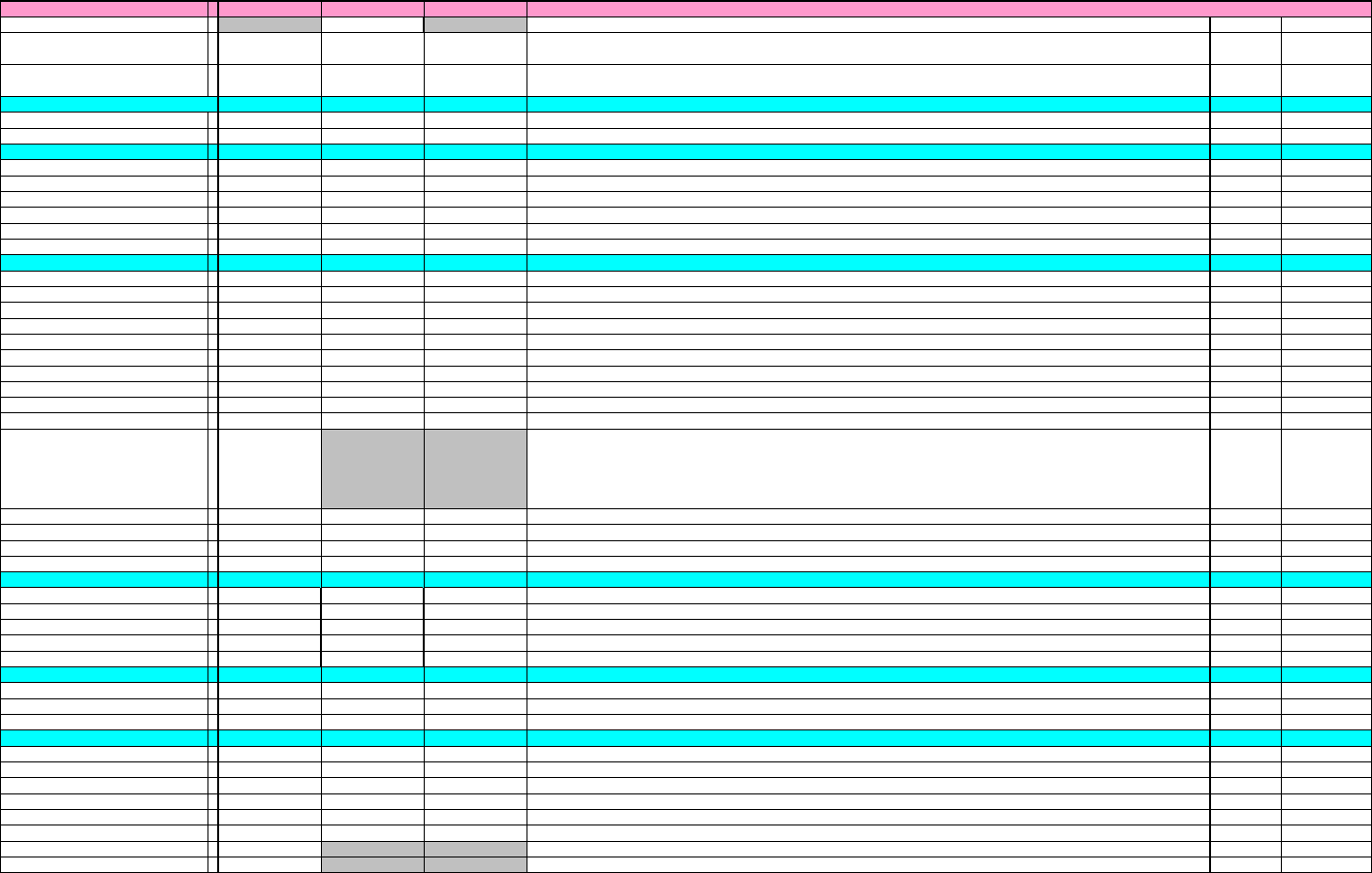
XP Proper Data List V1.40
14/11/2002
Item
XP141
XP241
XP341
Description
Reboot
__targetOfst_Y
=
0
0
0
Absolute encoder offset value (mm) It is necessary to turn on the power again.
Calibrated data l
__targetOfst_Z
=
0
0
0
Absolute encoder offset value (mm) It is necessary to turn on the power again.
Calibrated data l
__targetOfst_Q
=
0
0
0
Absolute encoder offset value (mm) It is necessary to turn on the power again.
Calibrated data l
__targetOfst_R
=
0
0
0
Absolute encoder offset value (mm) It is necessary to turn on the power again.
Calibrated data l
__targetOfst_T
=
0
0
0
Absolute encoder offset value (mm) It is necessary to turn on the power again.
Calibrated data l
__targetOfst_U
=
0
0
0
Absolute encoder offset value (mm) It is necessary to turn on the power again.
Calibrated data l
__targetOfst_F
=
0
0
0
Absolute encoder offset value (mm) It is necessary to turn on the power again.
Calibrated data l
__targetOfst_G
=
0
0
0
Absolute encoder offset value (mm) It is necessary to turn on the power again.
Calibrated data l
__TestOption
=
1
0
0
Re-try to acquire the image when strobe does not flash [0:invalid 1:valid]
User can edit
X_StbTime
=
20
0
0
XP141 X-axis stable time during placement (msec)
User cannot edit
Y_StbTime
=
20
0
0
XP141 Y-axis stable time during placement (msec)
User cannot edit
R_StbTime
=
0
0
0
XP141 R-axis stable time during placement (msec)
User cannot edit
Q_StbTime
=
0
0
0
Not used at present
User cannot edit
_________OPERATION_2_________
=
0
0
0
__DoNozzleCleaning
=
1
0
0
Nozzle cleaning function 0: Do not use 1: Use
User can edit
__PolarityConvert
=
1
1
1
Polarity converter flag 0: use 1: not use
User can edit
l
__DChangeTriger = 0 0 0
Trigger for slot/stage. 0 or 2: Recovery up 1: Parts out (when the parts out PB is pressed in the error display) 3:
Refer to the Part data (not used)
User can edit
__NotSimpleOptimize
=
1
0
0
0: Use simple optimize 1: Not use simple optimize
User can edit
__NozzleSurfaceCheck
=
0
0
0
Nozzle surface check 0: not used 1: used
User can edit
__UseVisionHeightOffset
=
0
0
0
Vision processing height compensation 0: not used 1: used
User can edit
__RearSideShtSpd
=
0
70
70
Shutter speed of rear Side light [µs]
Calibrated data
__RearFrontShtSpd
=
0
70
70
Shutter speed of rear Front light [µs]
Calibrated data
_PlacingModeSwitch = 0 0 0
Switches the arrival accuracy area during placement. 0: Does not distinguish arrival accuracy according to vision
type.
User can edit
__JogInterlockOFF
=
0
0
0
JOG key interlock 0: Use 1: Do not use
User cannot edit
__PickPosAutoMeasure = 0 0 0
Pickup position measurement 0: Disable this function 1: Carry out the measurement using the command key
operation in the "Pickup position measurement" display. 2: Carry out using the command key operation in the
"Pickup position measurement" and carry out automatically during auto mode.
User can edit
__UseMachineNozzleOnly = 0 0 0
If the setting is changed to "1", the following changes will be seen.
- At the auto production preparation ready process, unconditionally select the nozzles set on the machine for production ready
process.
- At the data check (in the editor), use nozzles in the machine and carry out the data check. It does not use the nozzles set in the
User can edit
__ErrStopBeforeFid = 0 0 0
0: Stop fiducial mark reading when the error occurred at pre-pickup parts vision processing
1: Do not stop
User can edit
__MarkEditWndAutoOpen = 1 1 1
Automatically the mark editor comes up on the display when the Fiducial mark reading error occurred during production.
0: Do not display automatically 1: Display automatically
User can edit
__OperationPanelDisp
=
0
0
0
Switch the operation panel display (only valid during auto operation) 0: Invalid 1: Valid
User can edit
_Special_MultiFiducial_Read
Not Used
_________VISION_________
=
0
0
0
__FiducialMarkImperfect
=
0
0
0
Read imperfect circle shape fiducial mark 0: Read 1: Do not read imperfect circle fiducial mark
User can edit
l
__VT20MPointOfLeadOff
=
0
0
0
Valid or invalid the Measure point of lead setting 0: Valid 1: Invalid
User can edit
__VT10AutoBPOff
=
0
0
0
Valid or invalid the Auto binary process at Vision Type 10 0: Valid 1: Invalid
User cannot edit
l
_FiducialMeasureFailRatio = 0 0 0
and
compile after changing this proper data.
User can edit
_BoardSkipMarkBrightnessLevel = 0 0 0
The threshold brightness value during board skip mark reading. *Input range is from 1 to 255. If a value outside the
range
User can edit
_________MACHINE_TYPE_2_________
=
0
0
0
__MachineParameter1
=
0
0
0
0: Standard setting 1:User special setting
User cannot edit
l
__StageModeSW
=
0
0
0
Stage mode (AA mode) 0:Invalid 1:Valid
User cannot edit
l
__RemoverType
=
0
1
0
Remover type for tray rejection 0: Old type 1: New type (Not used at present)
User cannot edit
__FiducialLampType
=
0
1
1
1: Machine with new infrared light mark camera 0: Other
User cannot edit
l
__TrayRetractCheck
=
0
1
0
Tray load check 0: Invalid 1: Invalid
User cannot edit
__TrayUnitType
=
0
1
0
0: Tray has not been modified yet 1: Tray has been modified
User cannot edit
l
2/10
XP Proper Data List V1.40
14/11/2002
Item
XP141
XP241
XP341
Description
Reboot
__UseMicroTray
=
0
0
0
Use micro-tray 0: Do not use 1: Use
User can edit
__SetDetectCensorSW = 0 0 0
0: The machine does not have tape retainer raised detection sensor 1: tape retainer raised check double sensors
are installed
User cannot edit
l
_EjectPanelUncondition = 0 0 0
During the panel unloading process if the board request signal from the next machine turns off when the panel is
passing the Main or Out pass through check sensor, 0 = stop with error, 1 = continue the panel unloading process.
User can edit
_________CYCLE_STEAL________
0
0
0
__CycleStealStartTime
=
5
5
5
The cycle steal check interval (minutes). Set to 0 to bypass the cycle steal.
User can edit
__CycleStealTerm
=
10
10
10
The cycle steal threshold. If the heat expansion is more than this value then the cycle steal is carried out. [um]
User can edit
_________AUTO_SETUP________
=
0
0
0
__ASSMCNum
=
0
0
0
Auto changeover flag. Enter numbers of M/Cs for together changeover for each group (1~3).
User can edit
l
__MCComPort
=
10000
10000
10000
Auto changeover flag. Port No. for the G-lead machine & other machines connection.(100000~99999)
User can edit
l
__PCComPort
=
10000
10000
10000
Auto changeover flag. Port No. for G-lead machine & IJ process connection (100000 ~ 99999) Specify only G-lead m/c
User can edit
l
__ASSFeederChk
=
0
0
0
Auto changeover flag. Feeder setup check 0:used. 1:Check only changed slot. 2: Check all slots.
User can edit
l
__ASSFeederChkAllSet
=
0
0
0
Auto changeover flag. Display [All OK] during feeder set up check 0: not display 1: display
User can edit
l
__ASSetupInfoDisp
=
0
0
0
Auto changeover flag. Display "Setup Information" dialog during changeover 0: not display 1: display
User can edit
l
_________DEBUG_FLAG________
=
0
0
0
__DebugFlag1
=
0
0
0
Debug flag
User cannot edit
__DebugFlag2
=
0
0
0
Debug flag
User cannot edit
__DebugFlag3
=
0
0
0
Debug flag
User cannot edit
__DebugFlag4
=
0
0
0
Debug flag
User cannot edit
__DebugFlag5
=
0
0
0
Debug flag
User cannot edit
__DebugFlag6
=
0
0
0
Debug flag
User cannot edit
__DebugFlag7
=
0
0
0
Debug flag
User cannot edit
__DebugFlag8
=
0
0
0
Debug flag
User cannot edit
__DebugFlag9
=
0
0
0
Debug flag
User cannot edit
__DebugFlag10
=
0
0
0
Debug flag
User cannot edit
__DebugBP = 0 0 0
Debug proper data for the threshold measurement: Switching the panel display at the threshold measurement.
0: Do not display during threshold measurement
1: Display the result of the measured threshold value in green at threshold measurement
2: Display the measuring range in green at threshold measurement
3: Display the result of the measured threshold value and the measuring range in green at threshold measurement
User cannot edit
__DebugDLL
=
0
0
0
*2 Display "Dynamic Logical Level" in green (LL level is figured up automatically) [T1.12c]
User cannot edit
__DebugBML
=
0
0
0
*3 Display "BlackMaskLevel" in yellow. [T1.12c]
User cannot edit
__CStructCheck
=
0
0
0
Overwrite protection (Illegal overwrite) of software configuration ("1" to ON)
User cannot edit
l
__NotPartLevel
=
0
0
0
Setting for fiducial mark vision process 0: Level 1: differential calculus
User cannot edit
l
_____CONV_DELAY_TIMER______
=
0
0
0
__InArrvOnDelayTimer
=
10
10
10
Delay timer setting for IN arrival check sensor ON [msec]
User can edit
__MainDecOnDelayTimer
=
10
10
10
Delay timer setting for MAIN deceleration sensor ON [msec]
User can edit
__MainArrvOnDelayTimer
=
10
10
10
Delay timer setting for MAIN arrival check sensor ON [msec]
User can edit
__MainPassOnDelayTimer
=
10
10
10
Delay timer setting for MAIN pass through check sensor ON [msec]
User can edit
__OutPassOnDelayTimer
=
10
10
10
Delay timer setting for OUT pass through check sensor ON [msec]
User can edit
_________TOUCH_PANEL_______
=
0
0
0
__TouchPanelType
=
1
1
1
[0:Touch panel is NOT used 1:Used]
User cannot edit
__TPDblClickSpeed
=
350
350
350
Mouse double click speed (msec)
User cannot edit
__TPDblClickDistance
=
30
30
30
Double click area
User cannot edit
_________SERVO_LIMIT_______
=
0
0
0
X_PlusLimit
=
835
835
835
X-axis servo stroke (mm)
Calibrated data l
X_MinusLimit
=
0
0
0
X-axis servo stroke (mm)
Calibrated data l
Y_PlusLimit
=
813
1174
834
Y-axis servo stroke (mm)
Calibrated data l
Y_MinusLimit
=
0
0
0
Y-axis servo stroke (mm)
Calibrated data l
Z_PlusLimit
=
14.5
55
55
Z-axis servo stroke (mm)
Calibrated data l
Z_MinusLimit
=
0
0
0
Z-axis servo stroke (mm)
Calibrated data l
F_PlusLimit
=
4.5
0
0
F-axis servo stroke (mm)
Calibrated data l
F_MinusLimit
=
-10.8
0
0
F-axis servo stroke (mm)
Calibrated data l
3/10