xp141-241-341-5.0E.pdf - 第218页
XP Proper Data List V1.40 14/11/2002 Item XP141 XP241 XP341 Description Reboot u_stGain = 0 1000 0 U-axis Gain value during positioning User cannot edit u_afterGain = 0 50 0 U-axis Gain value during stopping User cannot …
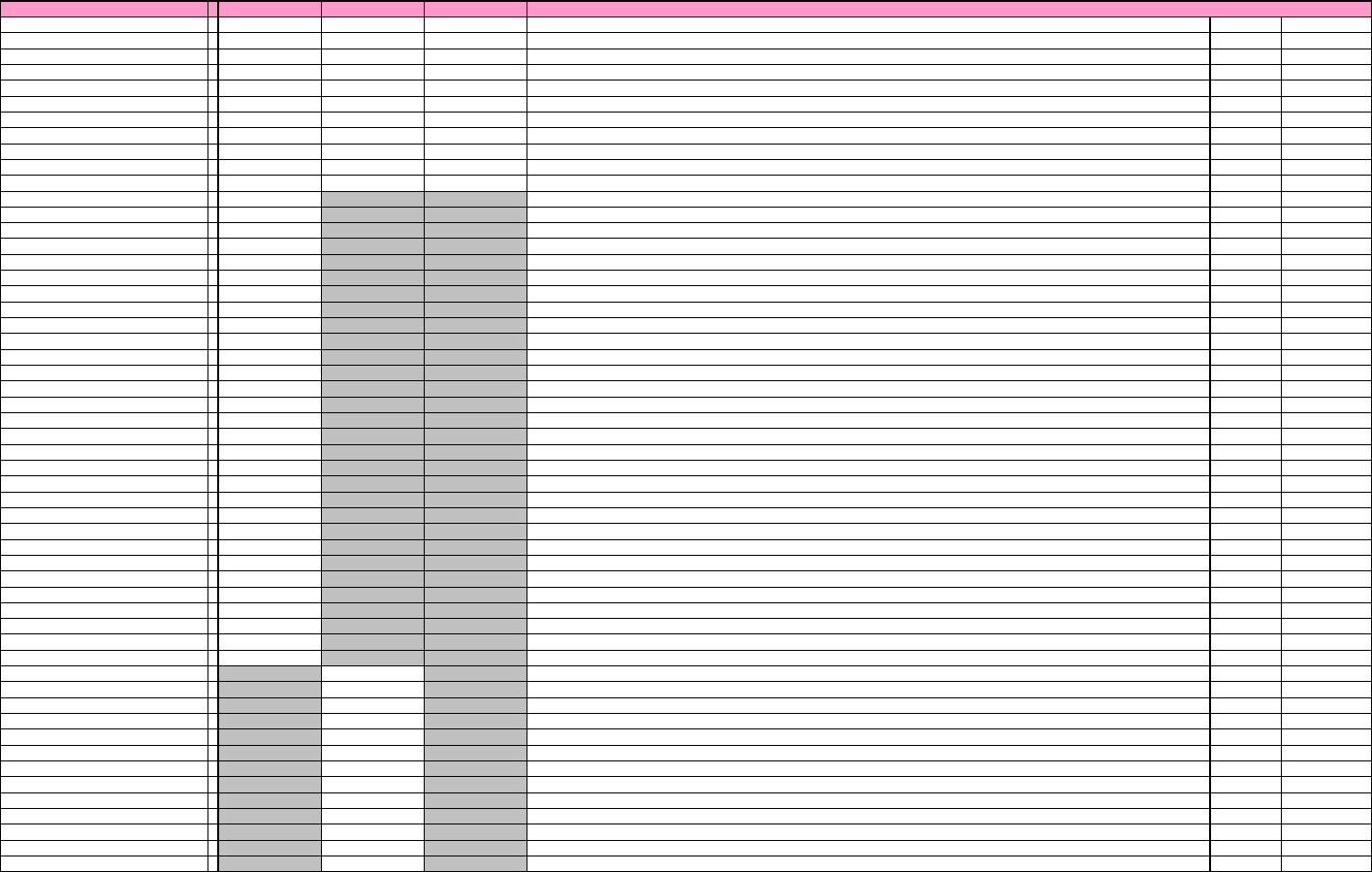
XP Proper Data List V1.40
14/11/2002
Item
XP141
XP241
XP341
Description
Reboot
z_CurveNo
=
1
1
1
Z-axis Cam curve No.(1:sinusoidal transformation, 3:NC2etc)
User cannot edit
q_MaxV
=
210000000
210000000
210000000
?-axis Max. speed
User cannot edit
q_MaxA
=
13000000000
10000000000
10000000000
?-axis Max acceleration
User cannot edit
q_ptpGain
=
200
300
300
?-axis Gain value during traveling
User cannot edit
q_stGain
=
500
2000
2000
?-axis Gain value during positioning
User cannot edit
q_afterGain
=
100
200
200
?-axis Gain value during stopping
User cannot edit
q_P_CON_Start
=
6
6
6
?-axis P_CON start time (ms).
User cannot edit
q_integralGain
=
100
200
200
?-axis Integral gain
User cannot edit
q_AxisValid
=
1
1
1
?-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
q_spare2
=
1
1
1
?-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
q_CurveNo
=
1
1
1
?-axis Cam curve No.(1:sinusoidal transformation, 3:NC2etc)
User cannot edit
r_MaxV
=
105000000
0
0
R-axis Max. speed
User cannot edit
r_MaxA
=
12000000000
0
0
R-axis Max acceleration
User cannot edit
r_ptpGain
=
120
0
0
R-axis Gain value during traveling
User cannot edit
r_stGain
=
1000
0
0
R-axis Gain value during positioning
User cannot edit
r_afterGain
=
100
0
0
R-axis Gain value during stopping
User cannot edit
r_P_CON_Start
=
6
0
0
R-axis P_CON start time (ms).
User cannot edit
r_integralGain
=
60
0
0
R-axis Integral gain
User cannot edit
r_AxisValid
=
1
0
0
R-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
r_spare2
=
1
0
0
R-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
r_CurveNo
=
3
0
0
R-axis Cam curve No.(1:sinusoidal transformation, 3:NC2etc)
User cannot edit
f_MaxV
=
8500000
0
0
F-axis Max. speed
User cannot edit
f_MaxA
=
1900000000
0
0
F-axis Max acceleration
User cannot edit
f_ptpGain
=
200
0
0
F-axis Gain value during traveling
User cannot edit
f_stGain
=
2000
0
0
F-axis Gain value during positioning
User cannot edit
f_afterGain
=
150
0
0
F-axis Gain value during stopping
User cannot edit
f_P_CON_Start
=
6
0
0
F-axis P_CON start time (ms)
User cannot edit
f_integralGain
=
100
0
0
F-axis Integral gain
User cannot edit
f_AxisValid
=
1
0
0
F-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
f_spare2
=
1
0
0
F-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
f_CurveNo
=
1
0
0
F-axis Cam curve No.(1:sinusoidal transformation, 3:NC2etc)
User cannot edit
g_MaxV
=
8500000
0
0
G-axis Max. speed
User cannot edit
g_MaxA
=
1900000000
0
0
G-axis Max acceleration
User cannot edit
g_ptpGain
=
200
0
0
G-axis Gain value during traveling
User cannot edit
g_stGain
=
2000
0
0
G-axis Gain value during positioning
User cannot edit
g_afterGain
=
150
0
0
G-axis Gain value during stopping
User cannot edit
g_P_CON_Start
=
6
0
0
G-axis P_CON start time (ms)
User cannot edit
g_integralGain
=
100
0
0
G-axis Integral gain
User cannot edit
g_AxisValid
=
1
0
0
G-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
g_spare2
=
1
0
0
G-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
g_CurveNo
=
1
0
0
G-axis Cam curve No. (1:sinusoidal transformation, 3:NC2etc)
User cannot edit
t_MaxV
=
0
5000000
0
T-axis Max. speed
User cannot edit
t_MaxA
=
0
100000000
0
T-axis Max acceleration
User cannot edit
t_ptpGain
=
0
50
0
T-axis Gain value during traveling
User cannot edit
t_stGain
=
0
1000
0
T-axis Gain value during positioning
User cannot edit
t_afterGain
=
0
50
0
T-axis Gain value during stopping
User cannot edit
t_P_CON_Start
=
0
6
0
T-axis P_CON start time (ms)
User cannot edit
t_integralGain
=
0
50
0
T-axis Integral gain
User cannot edit
t_AxisValid
=
0
1
0
T-axis 1: Valid this axis 0:Ignore this axis
User cannot edit
t_spare2
=
0
1
0
T-axis 1: Valid this axis 0:Ignore this axis
User cannot edit
t_CurveNo
=
0
2
0
T-axis Cam curve No.(1:sinusoidal transformation,NC2etc)
User cannot edit
u_MaxV
=
0
15000000
0
U-axis Max. speed (1500000 is the default value for the modified MTU, for the old type the value should be 100000000)
User cannot edit
u_MaxA
=
0
70000000
0
U-axis Max acceleration (70000000 is the default value for the modified MTU, for the old type the value should be 100000000)
User cannot edit
u_ptpGain
=
0
100
0
U-axis Gain value during traveling
User cannot edit
5/10
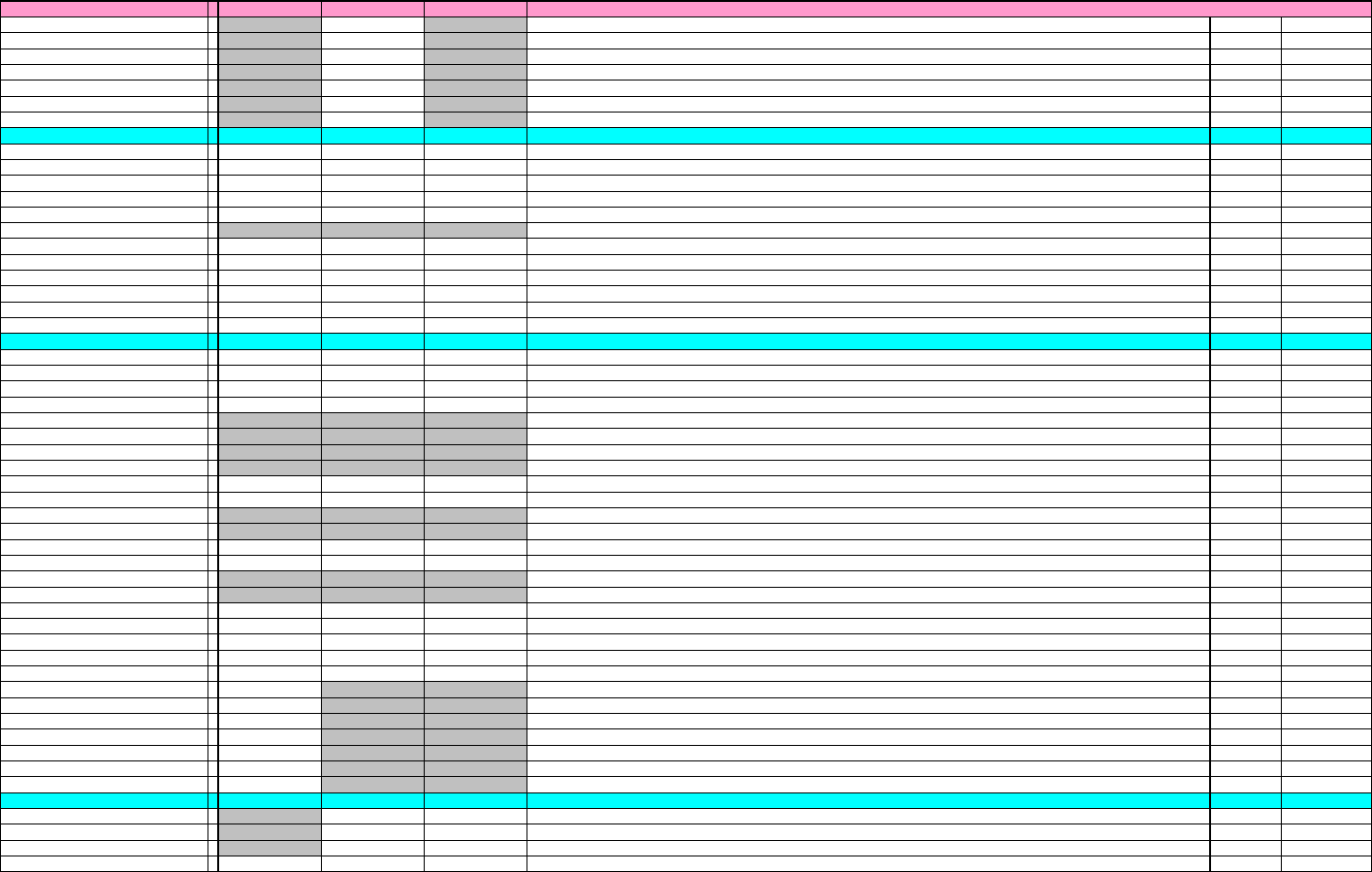
XP Proper Data List V1.40
14/11/2002
Item
XP141
XP241
XP341
Description
Reboot
u_stGain
=
0
1000
0
U-axis Gain value during positioning
User cannot edit
u_afterGain
=
0
50
0
U-axis Gain value during stopping
User cannot edit
u_P_CON_Start
=
0
6
0
U-axis P_CON start time (ms)
User cannot edit
u_integralGain
=
0
40
0
U-axis Integral gain
User cannot edit
u_AxisValid
=
0
1
0
U-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
u_spare2
=
0
1
0
U-axis 1:Valid this axis 0:Ignore this axis
User cannot edit
u_CurveNo
=
0
1
0
U-axis Cam curve No.(1:sinusoidal transformation 3:NC2etc) (1 is the default value for the new MTU, the old type should be set to 2).
User cannot edit
_______CAMERA_OFFSET_______
=
0
0
0
__Camera1DistanceX
=
101
68.5
68.5
X distance from fiducial camera center to nozzle rotation center
Calibrated data
__Camera1DistanceY
=
0
0
0
Y distance from fiducial camera center to nozzle rotation center
Calibrated data
__Camera2DistanceX
=
101
68.5
68.5
X distance from fiducial camera center to nozzle rotation center
Calibrated data
__Camera2DistanceY
=
0
0
0
Y distance from fiducial camera center to nozzle rotation center
Calibrated data
__DegFdclCam1Theta
=
0
0
0
Incline of fiducial camera 1 to the servo axis
Calibrated data
__DegFdclCam2Theta
=
0
0
0
Not used at present
User cannot edit
__Camera1CenterX
=
0
0
0
Camera center position X at side 1 (mm)
Calibrated data
__Camera1CenterY
=
0
0
0
Camera center position Y at side 1 (mm)
Calibrated data
__Camera1Theta
=
0
0
0
Tilt of camera at side 1(deg)
Calibrated data
__Camera2CenterX
=
0
0
0
Camera center position X at side 2 (mm)
Calibrated data
__Camera2CenterY
=
0
0
0
Camera center position Y at side 2 (mm)
Calibrated data
__Camera2Theta
=
0
0
0
Tilt of camera at side 2 (deg)
Calibrated data
_______MACHINE_ORIGIN______
=
0
0
0
X_Stage1org
=
412.1
436.5
436.5
X pickup origin at stage 1
Calibrated data
Y_Stage1org
=
8
7
10.5
Y pickup origin at stage 1
Calibrated data
X_Stage2org
=
422.9
557.5
256.5
X pickup origin at stage 2
Calibrated data
Y_Stage2org
=
805
842
830.5
Y pickup origin at stage 2
Calibrated data
X_Stage3org
=
0
0
0
X pickup origin at stage 3
User cannot edit
Y_Stage3org
=
0
0
0
Y pickup origin at stage 3
User cannot edit
X_Stage4org
=
0
0
0
X pickup origin at stage 4
User cannot edit
Y_Stage4org
=
0
0
0
Y pickup origin at stage 4
User cannot edit
Z_Stage1Surface
=
0.7
14.3
14.3
Pickup Origin (height) at stage 1
Calibrated data
Z_Stage2Surface
=
0.7
0.8
14.3
Pickup Origin (height) at stage 2
Calibrated data
Z_Stage3Surface
=
0
0
0
Pickup Origin (height) at stage 3
User cannot edit
Z_Stage4Surface
=
0
0
0
Pickup Origin (height) at stage 4
User cannot edit
__DevPitch1
=
16
20
20
Device pitch (stage 1)
User cannot edit
__DevPitch2
=
16
20
20
Device pitch (stage 2)
User cannot edit
__DevPitch3
=
0
0
0
Device pitch (stage 3)
User cannot edit
__DevPitch4
=
0
0
0
Device pitch (stage 4)
User cannot edit
X_BoardOrg
=
466.5
471.5
471.5
Board origin X (counter value)
Calibrated data
Y_BoardOrg
=
236.25
242.3
242.3
Board origin Y (counter value)
Calibrated data
Z_BoardSurface
=
0.7
1
1
Placement reference height (counter value)
Calibrated data
X_TableOrg
=
5
50
50
Robot retract position X (counter value)
User cannot edit
Y_TableOrg
=
400
350
350
Robot retract position Y (counter value)
User cannot edit
F_UpPoint
=
0
0
0
F-axis upper limit (counter value)
Calibrated data
F_DownPoint
=
-8.7
0
0
F-axis lower limit (counter value)
Calibrated data
G_UpPoint
=
0
0
0
G-axis upper limit (counter value)
Calibrated data
G_DownPoint
=
-8.7
0
0
G-axis lower limit (counter value)
Calibrated data
R_Pos1
=
0
0
0
Revolver rotation angle when nozzle 1 comes to the pickup position (XP141)
User cannot edit
Q_PosPick1
=
6.5
0
0
Q-axis pickup position when nozzle 1 comes to the pickup position
User cannot edit
Q_PosPlace1
=
0
0
0
Q-axis placing position when nozzle 1 comes to the [R_Pos1] position
User cannot edit
______NOZZLE_POSITION______
=
0
0
0
X_NzlPosX1
=
0
85
825
Nozzle station position (1) X
Calibrated data
Y_NzlPosY1
=
0
789.5
137
Nozzle station position (1) Y
Calibrated data
Z_NzlPosZ1
=
0
0.7
28.2
Nozzle station position (1) Z
Calibrated data
Z_NzlPosZH
=
9.6
52
52
Nozzle lift Max. height
Calibrated data
6/10
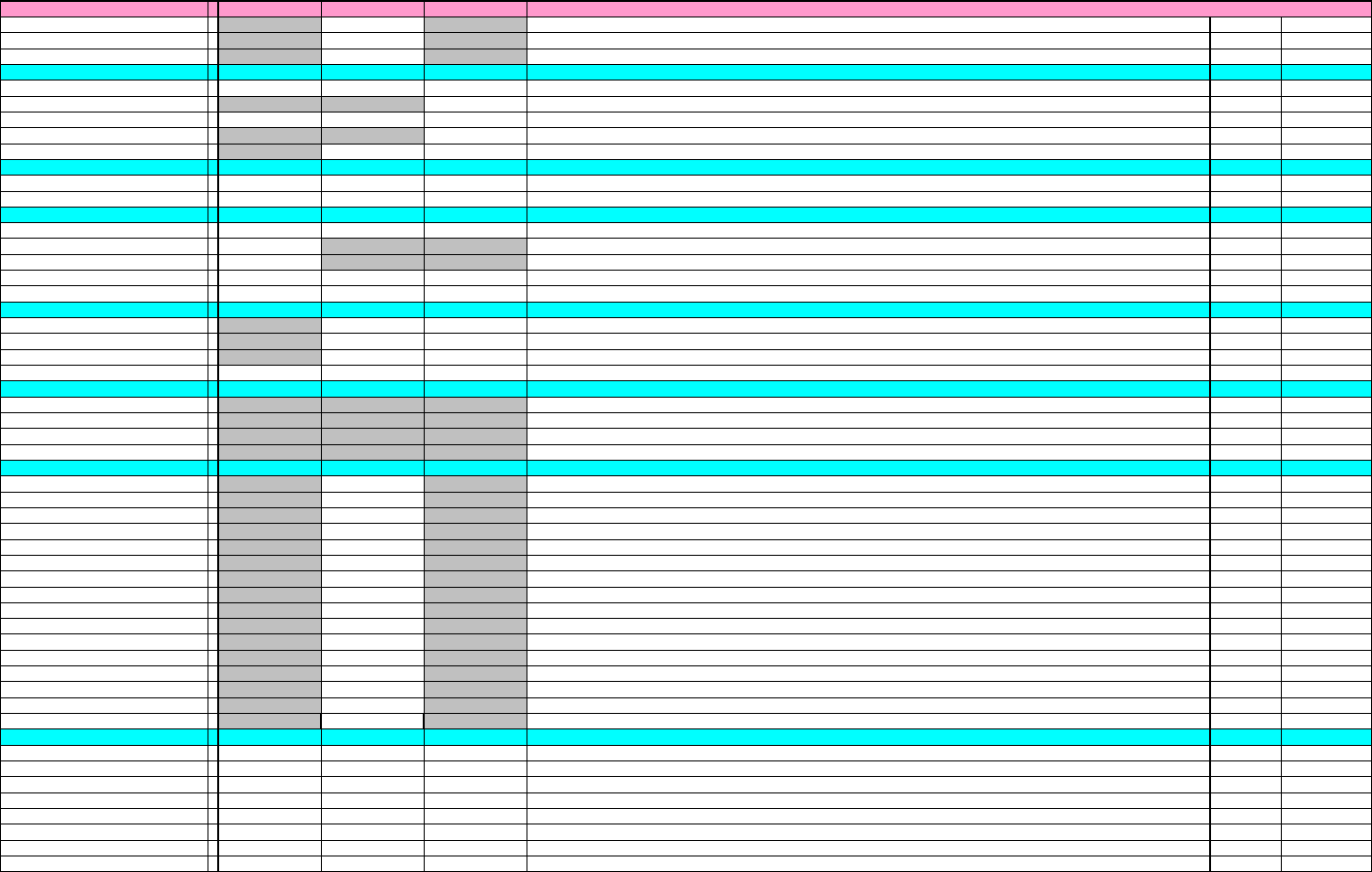
XP Proper Data List V1.40
14/11/2002
Item
XP141
XP241
XP341
Description
Reboot
X_RemoverPos
=
0
110
0
Tray remover position X
Calibrated data
Y_RemoverPos
=
0
1093
0
Tray remover position Y
Calibrated data
Z_RemoverPos
=
0
0
0
Tray remover position (Height) Z
Calibrated data
______DISPOSE_POSITION_____
=
0
0
0
X_Disposal1
=
346.5
351.5
346.5
Small NG parts eject position (from FD camera)
Calibrated data
X_Disposal2
=
0
0
2.5
XP341Tray NG parts eject position X
Calibrated data
Y_Disposal1
=
202.4
206
209.5
Small NG parts eject position (from FD camera)
Calibrated data
Y_Disposal2
=
0
0
240.5
XP341 Tray NG parts eject position Y
Calibrated data
Z_Disposal2
=
0
1
29.3
Large NG parts eject position (from FD camera)
Calibrated data
_______PRIZM_POSITION______
=
0
0
0
__PrismFront
=
136.5
147
147
Camera image acquiring position at Side 1
Calibrated data
__PrismBack
=
676.5
687
687
Camera image acquiring position at Side 2
Calibrated data
________JIG_POSITION_______
=
0
0
0
X_JigPickPos1
=
127.5
157.1
157.1
XP141:Jig (Large) pickup position XP241 Jig pickup position XP341Jig pickup position
Calibrated data
X_JigPickPos2
=
137.5
0
0
XP141:Jig (Middle) pickup position
Calibrated data
X_JigPickPos3
=
147.5
0
0
XP141:Jig (Small) pickup position
Calibrated data
Y_JigPickPos
=
209.05
207.75
211.75
XP141:Jig pickup position XP241:Jig pickup position XP341:Jig pickup position
Calibrated data
Z_JigPickPos
=
0.7
3.5
3.5
Jig pickup height
Calibrated data
_________ELEGANCE__________
=
0
0
0
__PlaceEleganceQ
=
0
0
0
XP241 & 341 ?-axis servo acceleration of placement (0.01~1) When 0 is set, it is 1.0
User cannot edit
__PlaceUpSpeedRatio
=
0
0.07
0.07
This is for XP241, 341 Nozzle raise speed factor after placement Speed factor 0.01 ~ 1.00. (Only for VT100 and VT20)
User can edit
__PlaceUpMaxSpeed
=
0
1000
1000
Maximum speed spec. for Z-axis motion speeed after parts placement. (Inputting range: 100.0 ~ 1000.0 [mm/s]
User can edit
__CycleStealElegance
=
1
1
1
The cycle steal elegance value setting. The cycle steal is carried out when passing the "waiting for the next process "over the __CycleStealTime.
User can edit
_________F_GLASS_VALUE__________
=
0
0
0
XMainStDecelPos
=
0
0
0
*2 Board deceleration position X [T1.12f]
User cannot edit
YMainStDecelPos
=
0
0
0
*2 Board deceleration position Y [T1.12f]
User cannot edit
XMainStArrivPos
=
0
0
0
*2 Board arrival position X [T1.12f]
User cannot edit
YMainStArrivPos
=
0
0
0
*2 Board arrival position Y [T1.12f]
User cannot edit
___________TRAY____________
=
0
0
0
T_TrayOrg
=
0
465
0
T-axis position at tray 101 (shuttle extend position)
Calibrated data
T_TrayEmptyOrg
=
0
495
0
T-axis position to detect empty on tray 101
Calibrated data
U_ShuttleBackwardOfst
=
0
0
0
Offset value at shuttle retract limit
Calibrated data
U_ShuttleForwardOfst
=
0
0
0
Offset value at shuttle extend limit
Calibrated data
U_ShuttleClampPos
=
0
488
0
Shuttle clamp position [mm]
Calibrated data
__ShuttleClampOfst
=
0
0
0
Tray shuttle clamp stroke offset [mm] (For the tray unit which is modified, The setting (__TrayUnitType =1) is only valid. Inputting range : -1.5 to +1.5. Calibrated data
__ElevotorOfst2
=
0
0
0
T-axis offset of the possible forward amount of tray No.11*. [mm]
Calibrated data
__ElevotorOfst3
=
0
0
0
T-axis offset of the possible forward amount of tray No.12*. [mm]
Calibrated data
__ElevotorOfst4
=
0
0
0
T-axis offset of the possible forward amount of tray No.13*. [mm]
Calibrated data
__ElevotorOfst5
=
0
0
0
T-axis offset of the possible forward amount of tray No.14*. [mm]
Calibrated data
__ElevotorOfst6
=
0
0
0
T-axis offset of the possible forward amount of tray No.15*. [mm]
Calibrated data
__ElevotorOfst7
=
0
0
0
T-axis offset of the possible forward amount of tray No.16*. [mm]
Calibrated data
__ElevotorOfst8
=
0
0
0
T-axis offset of the possible forward amount of tray No.17*. [mm]
Calibrated data
__ElevotorOfst9
=
0
0
0
T-axis offset of the possible forward amount of tray No.18*. [mm]
Calibrated data
__ElevotorOfst10
=
0
0
0
T-axis offset of the possible forward amount of tray No.19*. [mm]
Calibrated data
__TrayPickUpOfstZ
=
0
0
0
Tray parts pickup height offset [mm] *But the value less than -3.0 or more than +3.0 does not offset.
User can edit
________PLACE_OFFSET_______
=
0
0
0
__PlaceGlobalOfstX
=
0
0
0
Placement offset X (Valid only with VT10, 18, 20)
User cannot edit
__PlaceGlobalOfstY
=
0
0
0
Placement offset Y (Valid only with VT10, 18, 20)
User cannot edit
__PlaceGlobalOfstQ
=
0
0
0
Placement offset Q (Valid only with VT10, 18, 20)
User cannot edit
__PlaceGlobalOfstXR
=
0
0
0
Placement offset X (Valid only with VT10, 18, 20)
User cannot edit
__PlaceGlobalOfstYR
=
0
0
0
Placement offset Y (Valid only with VT10, 18, 20)
User cannot edit
__PlaceGlobalOfstQR
=
0
0
0
Placement offset Q (Valid only with VT10, 18, 20)
User cannot edit
__PlaceOfstForFidCamAngX
=
0
0
0
Placement offset X (mm)
User cannot edit
__PlaceOfstForFidCamAngY
=
0
0
0
Placement offset Y (mm)
User cannot edit
7/10