MIL- STD-883F 2004 TEST METHOD STANDARD MICROCIRCUITS.pdf - 第360页
MIL-STD-883F METHOD 2020.8 18 June 2004 4 TABLE I. Pac kage Height vs.Tes t Frequenc y for 20g Ac celer ation ( condit ion A). Note: The s haker dr ive tes t fr equency (F) for c onditi on A (see 3. 1) is determi ned by …
MIL-STD-883F
METHOD 2020.8
18 June 2004
3
3.3.2 Test monitoring. Each test cycle (see 3.3) shall be continuously monitored, except for the period during co-test
shocks and 250 ms maximum after the shocks. Particle indications can occur in any one or combinations of the three
detection systems as follows:
a. Visual indication of high frequency spikes which exceed the normal constant background white noise level.
b. Audio indication of clicks, pops, or rattling which is different from the constant background noise present with no
DUT on the transducer.
c. Threshold detection shall be indicated by the lighting of a lamp or by deflection of the secondary oscilloscope trace.
3.4 Failure criteria
. Any noise bursts as detected by any of the three detection systems exclusive of background noise,
except those caused by the shock blows, during the monitoring periods shall be cause for rejection of the device. Rejects
shall not be retested except for retest of all devices in the event of test system failure. If additional cycles of testing on a lot
are specified, the entire test procedure (equipment setup and checkout mounting, vibration, and co-shocking) shall be
repeated for each retest cycle. Reject devices from each test cycle shall be removed from the lot and shall not be retested
in subsequent lot testing.
3.5 Screening lot acceptance
. Unless otherwise specified, the inspection lot (or sublot) to be screened for lot acceptance
shall be submitted to 100 percent PIND testing a maximum of five times in accordance with condition A herein. PIND
prescreening shall not be performed. The lot may be accepted on any of the five runs if the percentage of defective devices
in that run is less than 1 percent and the cumulative number of defective devices does not exceed 25 percent. All defective
devices shall be removed after each run. Resubmission is not allowed.
*
MIL-STD-883F
METHOD 2020.8
18 June 2004
4
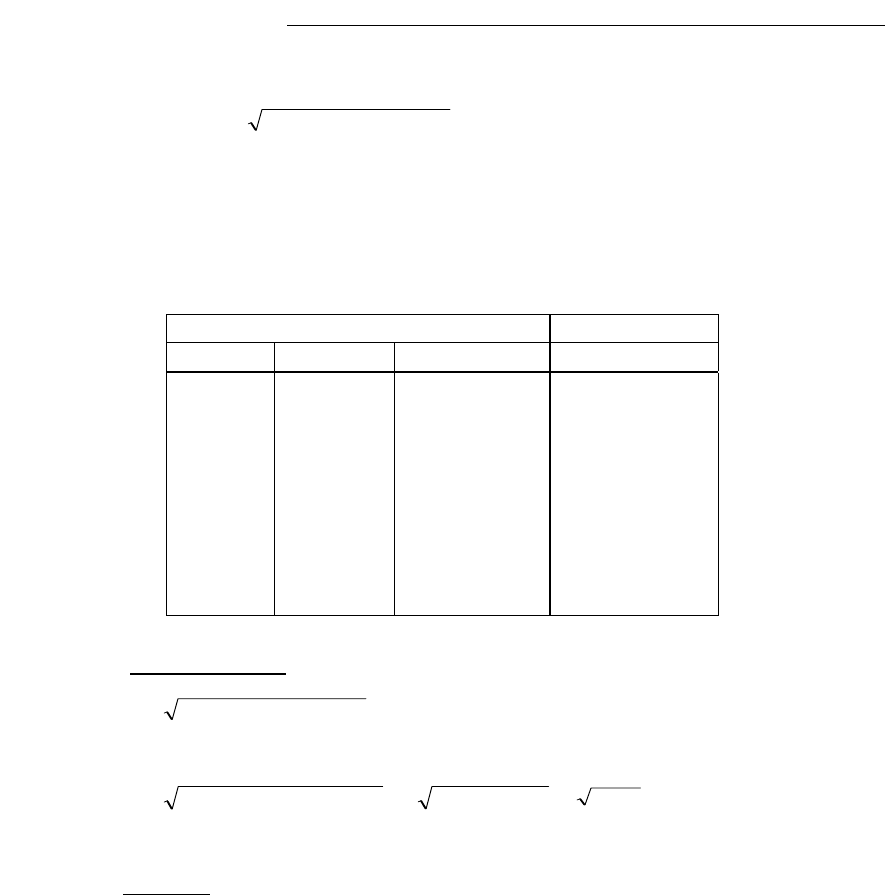
TABLE I. Package Height vs.Test Frequency for 20g Acceleration (condition A).
Note: The shaker drive test frequency (F) for condition A (see 3.1) is determined by the package internal cavity height
using the following formula:
F =
)]0511.0()/[(20 XD
where: D = Average internal package height (in inches).
20 is a constant in this application and is equal to sinusoidal acceleration of 20g.
F is the shaker drive test frequency (in Hz)
Based on the formula above, the following table is generated:
Average Internal Cavity Height Test Frequency
Mils mm inches Hz
30 0.76 0.030 114
40 1.02 0.040 99
50 1.27 0.050 88
60 1.52 0.060 81
70 1.78 0.070 75
80 2.13 0.080 70
90 2.29 0.090 66
100 2.54 0.100 63
110 2.79 0.110 60
Example calculation:
Assume an average internal cavity height of 70 Mils.
F =
)]0511.0()/[(20 XD
D = 70 Mils converted to inches = .070 inches.
F =
])0511.0()070/[(.20 X
=
]00358/[.20
=
5586
= 75 Hz
4. SUMMARY
. The following details shall be specified in the applicable acquisition document:
a. Test condition letter A or B.
b. Lot acceptance/rejection criteria (if other than specified in 3.5).
c. The number of test cycles, if other than one.
d. Pre-test shock level and co-test shock level, if other than specified.
*
MIL-STD-883F
METHOD 2020.8
18 June 2004
5
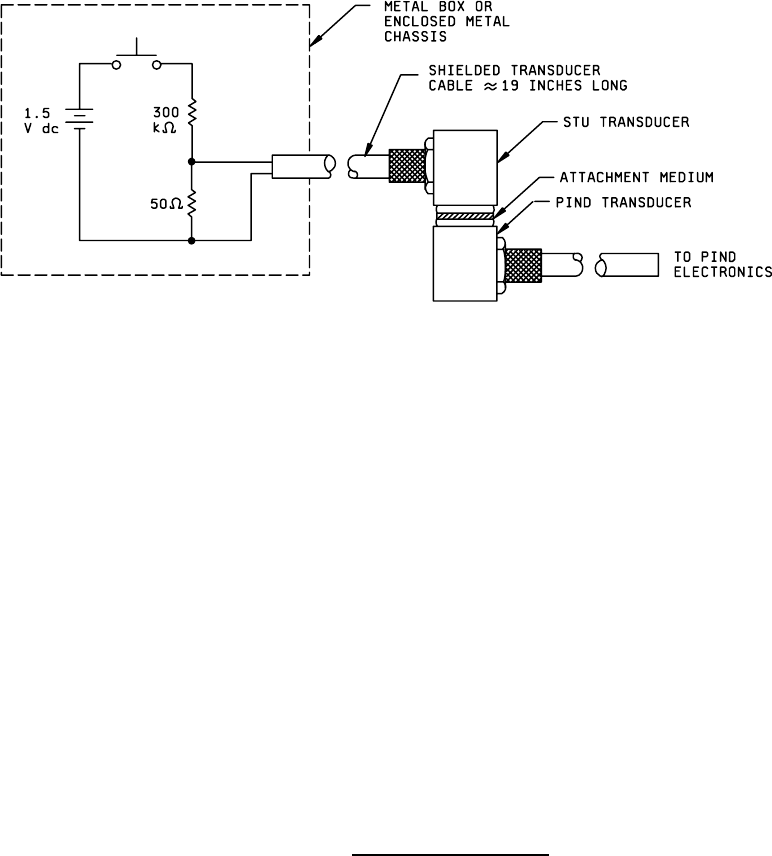
NOTES:
1. Pushbutton switch: Mechanically quiet, fast make, gold contacts. E.G. T2 SM4 microswitch.
2. Resistance tolerance 5 percent noninductive.
3. Voltage source can be a standard dry cell.
4. The coupled transducers must be coaxial during test.
5. Voltage output to STU transducer 250 microvolts, ±20 percent.
FIGURE 2020-1 Typical sensitivity test unit
.