00195440-05-SG_D-Series_FSE-EN.pdf - 第103页
6 Reference Run 6.1.4 Vacuum Reference Run 6.1 Reference Run (D/D i-Series) Student Guide SIPLACE D-Series (FSE) 103 6.1.4.4 6 . 1 . 4 . 4 N o z z le S c a n n in g Nozzle Scanning Nozzle scanning is a sight chec k of th…
6 Reference Run
6.1 Reference Run (D/Di-Series) 6.1.4 Vacuum Reference Run
102 Student Guide SIPLACE D-Series (FSE)
6.1.4.2
6.1.4.2 Determining the Vacuum and Threshold Values
Determining the Vacuum and Threshold Values
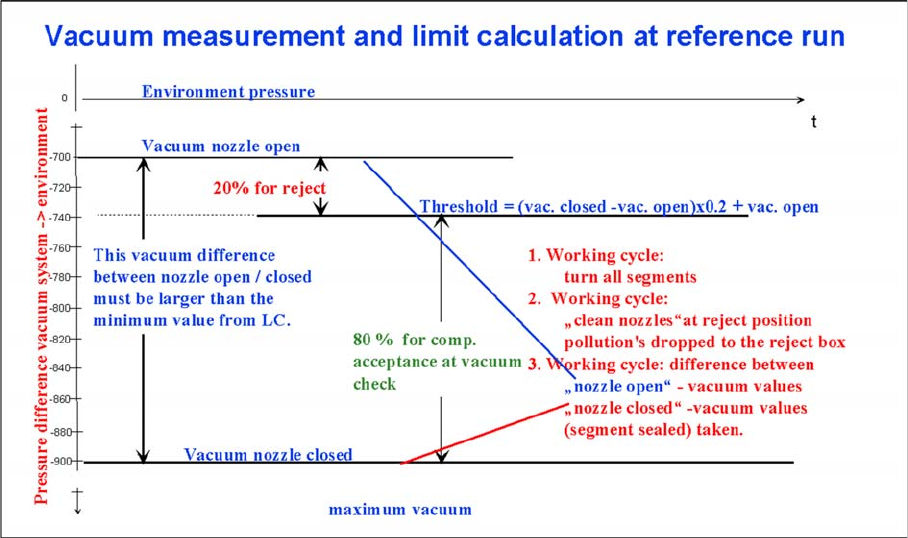
Measuring and calculating the vacuum values for a reference run
Legend
1. The vacuum is measured twice during the reference run:
– Once with closed
– and once with open valve, while air flows through the nozzle.
2. The value with closed valve depends on the ambient pressure and may vary, according to the local
weather conditions and altitude. The higher the ambient pressure, the lower the vacuum at closed
valve.
3. The value with open valve depends on the nozzle size and condition. The smaller the nozzle, the
greater the open valve value will be. A contaminated or blocked nozzle will also give a higher valve.
4. The difference between the open and closed nozzles has been preset by the line controlling line
computer (LC or SIPLACE Pro), as a minimum value. This value is different for all nozzle types e.g.
120 mbar for 914 and 904 nozzles. If these values are not achieved, the error message "Vakuum-
differenz offen-geschlossen zu gering" (vacuum difference open-closed is too low) will appear.
5. The threshold for component acceptance is also set now. In this case we have a value of 700 mbar
when the nozzle is open and a value of 900 mbar when the nozzle is closed. The calculation is per-
formed as follows:
Threshold = (900(closed) - 700(open))= x 0.2 + 700(open) = 200 x 0.2 + 700 = 740
6.1.4.3
6.1.4.3 Rotating the Nozzles into the 0 Degrees Starting Position
Rotating the Nozzles into the 0 Degrees Starting Position
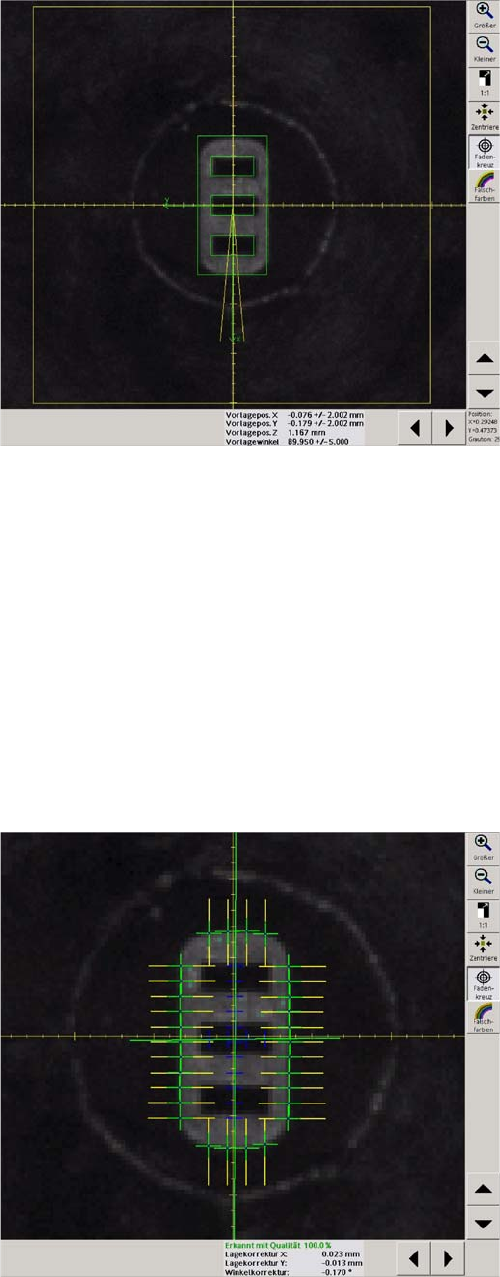
While the vacuum values are being measured, the turning station can rotate all segment sleeves into the
0° starting position.
Sequence:
► The star axis rotates all segments through the working positions.
► The turning station swivels in during vacuum measurement.
► The axis controller positions the relevant segment at the light-dark transition, which represents the
0 degrees position of the sleeves. (The long side of rectangular nozzles in the X direction.)
► – The turning station is swiveled out again by a CAN bus command .
6 Reference Run
6.1.4 Vacuum Reference Run 6.1 Reference Run (D/Di-Series)
Student Guide SIPLACE D-Series (FSE) 103
6.1.4.4
6.1.4.4 Nozzle Scanning
Nozzle Scanning
Nozzle scanning is a sight check of the nozzles to detect
contamination. The vacuum system is not used for this.
The error messages include:
Nozzle slightly dirty
Nozzle dirty
Scanning is only performed for small nozzles from 904 or
smaller. It detects bright contamination on the nozzles.
Bright contamination must be removed otherwise the fol-
lowing problems could occur as a consequence.
Placement offset
Increase rejection rates due to Vision errors (component
width/length outside the tolerance)
Impaired pickup optimization, as the component center is
incorrectly calculated.
Scanning is performed as a standard after every 350
pickup and place cycles (i.e. after 4200 components on
the 12 segment head) but only after the board has been
completed.
These settings can be programmed in the machine data
by the Siemens technician.
Sequence:
► The star axis rotates all segments through the work-
ing positions.
► The component camera illuminates the nozzle and
measures its outer and inner contours.
► If the results are out od tolerence the error message
"dirty orcomtaninated nozzle apeares.
The vacuum reference run is now finished.
6 Reference Run
6.1 Reference Run (D/Di-Series) 6.1.5 Height Reference Run
104 Student Guide SIPLACE D-Series (FSE)
6.1.5
6.1.5 Height Reference Run
Height Reference Run
6.1.5.1
6.1.5.1 Head Height Check and Nozzle Length Measurement
Head Height Check and Nozzle Length Measurement
This part of the reference run is performed in sequence at the gantries of the relevant processing area,
as the X/Y height measurement position needs to be the same for both gantries.
Sequence:
► The gantry axes move the placement head over the height measurement position on the fixed con-
veyor side.
► The Z-axis moves segment 1 down, as far as the end stopper.
► The Z.axis "height position" is read out of the Z-axis position counter.
► The Z-axis is moved up again, to the 0 position.
► This process is repeated for all the segments of the relevant placement head and then for the 2nd
gantry.
► A nozzle length error is issued if the values deviate by more than+/- 0.4 mm from the nozzle 1 meas-
urement. The nozzle causing this error must then be replaced before starting placement operations.
6.1.5.2
6.1.5.2 Nozzle Length Measurement in the Component Sensor
Nozzle Length Measurement in the Component Sensor
If the component sensor option is installed and configured on the C&P12 placement head, the MC will
issue a CAN bus command for nozzle length measurement to be performed in the component sensor,
provided the nozzle to be set up is long enough (for nozzles longer than 12 mm, appropriately longer
than a 915 nozzle).
► The shadow cast by the component sensor IR laser beam is measured during star rotation.
► The programming system prescribes the nominal parameters for dynamics, length and vacuum
checks, for the nozzle type concerned.
► The measurement is saved as the reference length for the empty nozzle.
Empty nozzles are then compared to this reference value, before the component to be checked is
taken up. A "nozzle length error in component sensor" is issued if the value deviates by +0.15/
-0.1 mm.
The whole reference run is now finished. If no error messages have been issued, the station is now ready
for placement operations. The message "Waiting for PCB in input conveyor" will be shown.
NOTICE
All measurement values are accepted for special nozzles in the X9X series.
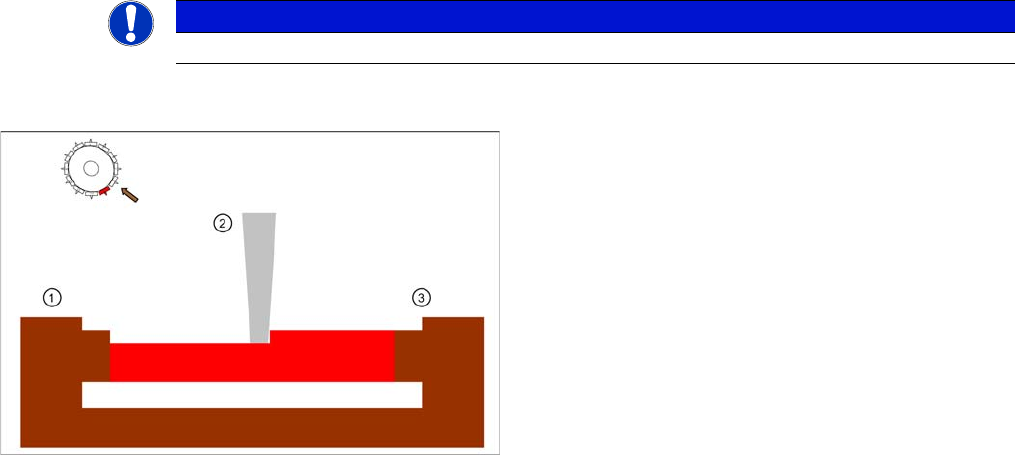
Nozzle length reference values for component recogni
-
tion in the component sensor option
Legend
1. IR receiver on C&P12 head back part
2. Nozzle
3. IR transmitter on C&P12 head front part