00195440-05-SG_D-Series_FSE-EN.pdf - 第163页
9 C&P Placement Heads 9.3.1 Z Axis Down 9.3 Travel Profile - Pickup Student Guide SIPLACE D-Series (FSE) 163 9.3.1.2 9 . 3 . 1 . 2 S p e c ia l M o d e " C o n t a c t le s s P ic k u p " Z - A x is D o w n…
9 C&P Placement Heads
9.3 Travel Profile - Pickup 9.3.1 Z Axis Down
162 Student Guide SIPLACE D-Series (FSE)
9.3
9.3 Travel Profile - Pickup
Travel Profile - Pickup
9.3.1
9.3.1 Z Axis Down
Z Axis Down
9.3.1.1
9.3.1.1 Detailed Standard Pickup Procedure: Z-Axis Down
Detailed Standard Pickup Procedure: Z-Axis Down
Star position 0°: detailed pickup procedure: Z-axis down
Start gantry axes to pickup position of next feeder and
communication with changeover table: Start signal to
gantry axes
▪ Start signal X & Y axis to next feeder/this opens the
feeder flap
End position signal for X/Y and star axes:
▪ End position signal for star axis
▪ Enables vacuum query: "segment airtight?" before
pickup
▪ X/Y end position signals available.
Z-axis starts:
▪ Z-axis starts positioning downwards
Light barrier (LB) up switches:
▪ Release signal for function LB down, (after a waiting
period of approx. 3.6 ms, depending on the DIP
switch, special function, currently not active as a de-
fault)
LB down switches:
▪ End position signal for positioning Z-axis down
▪ and valve positioning drive ON for vacuum.
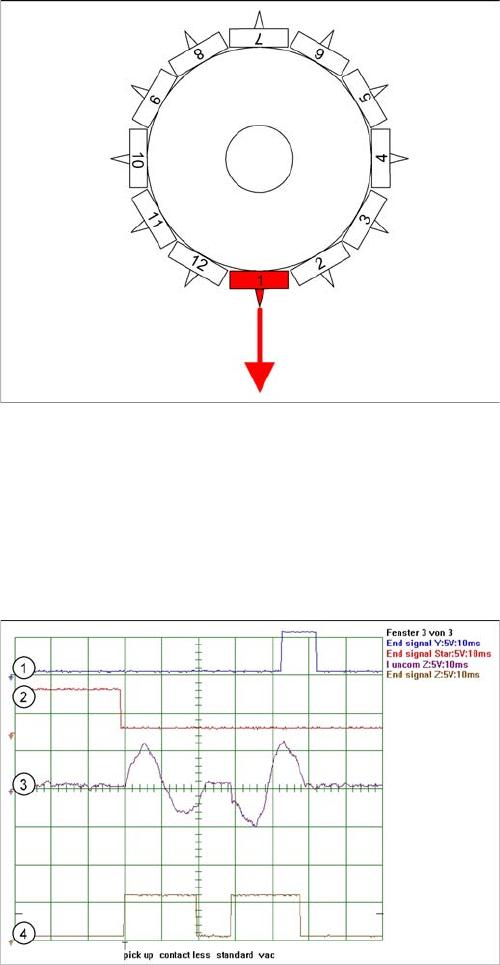
Legend
1. End position signal for Y-axis (position to feeder pick-
up position)
2. End position signal for star axis
3. Uncommutated motor current for Z-axis
4. End position signal for Z-axis
Section 1: move down
Section 2: move up
8 ms after the end position signal for the Z-axis, the
system switches over to vacuum and the Z-axis is re-
started and moved upwards.
9 C&P Placement Heads
9.3.1 Z Axis Down 9.3 Travel Profile - Pickup
Student Guide SIPLACE D-Series (FSE) 163
9.3.1.2
9.3.1.2 Special Mode "Contactless Pickup" Z-Axis Down
Special Mode "Contactless Pickup" Z-Axis Down
Pickup procedure for "contactless pickup":
▪ Start gantry axes to pickup position of feeder and communication with changeover table:
– Start signal to gantry axes
– Signal for next feeder / this opens the feeder flap
▪ End position signal for X/Y and star axes:
– End position signal for star axis
– Enables vacuum query: "segment airtight?" before pickup
– X/Y end position signals available.
▪ Z-axis starts with operating mode "positioning type - absolute" to saved nominal height:
– Positioning of Z-axis down
▪ Light barrier (LB) up switches:
– Release for function LB down (although not needed))
▪ Axis controller switches:
– When the taught pickup height is reached, end position signal for Z-axis positioning is issued.
▪ The machine controller switches:
– Valve positioning drive for switching over to vacuum ON.
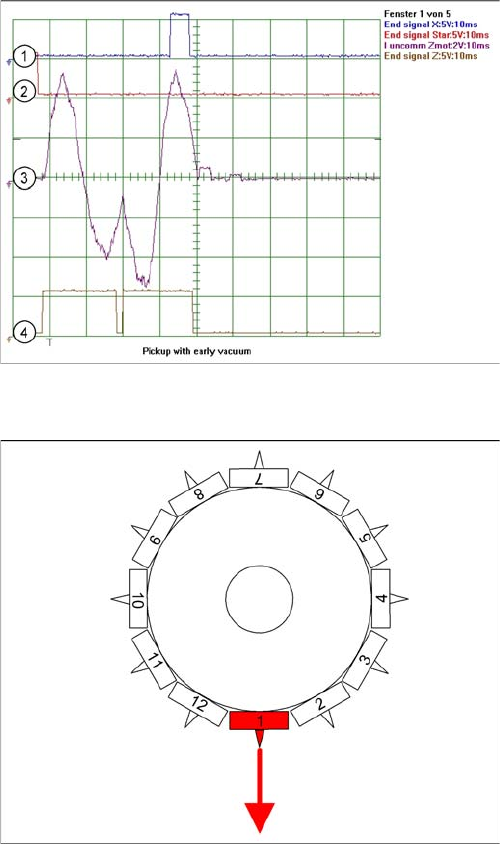
Legend
1. End position signal for X-axis (position to feeder pick-
up position)
2. End position signal for star axis
3. Uncommutated motor current for Z-axis
4. End position signal for Z-axis
Section 1: move down
Section 2: move up
In contrast to the previous diagram, a delay of typical-
ly 2 ms occurs for early vacuum.
Special mode Z-axis down with "early vacuum ON in top
position"
In the case of LRU/LRL 503 and SIPLACE Pro, contact-
less pickup can only be programmed in the CS for SR/
MC 503 stations and higher.
When the component track, for which contactless pickup
has been programmed, is accessed for the first time, the
following is performed:
▪ The Z-axis is taught the pickup height with increased
force. The Z-axis moves until it mechanically stops.
▪ This pickup height is then reduced by 1.13 mm (602)
to give the nominal height (path of segment deceler-
ation and ...) and is saved. The component used for
the teaching procedure is rejected.
9 C&P Placement Heads
9.3 Travel Profile - Pickup 9.3.1 Z Axis Down
164 Student Guide SIPLACE D-Series (FSE)
▪ The positioning procedure for "upwards" is identical to that for standard pickup.
Benefits of special mode "contactless pickup"
The function option "contactless pickup" offers the following benefits:
▪ Prevents touching of component feeder unit and the possible resulting component shift/jump.
▪ Increases the pickup reliability for small COs, lightweight COs and exotic COs. The nozzle "hovers"
about 0.1 mm above the component surface. When the vacuum is switched on, the nozzles sucks
up the component from the tape pocket!
▪ No time loss during pickup (compared to standard pickup).
▪ The function is NOT limited to 0201 component shapes, certain nozzle types or feeder types.
9.3.1.3
9.3.1.3 Special Mode "Pickup with Minimum (Very Low) Force " for Z-Axis Down
Special Mode "Pickup with Minimum (Very Low) Force " for Z-Axis Down
Travel profile 21 and 22
These travel profiles are currently only for the Twin head (P&P module) and are only available with a
special nozzle.
Definable pickup forces: 0.9 - 2.0 N
9.3.1.4
9.3.1.4 Standard Mode for Smaller Components (<6x6mm²) Picked Up with Early Vacuum, Z-Axis Down
Standard Mode for Smaller Components (< 6x6 mm²) Picked Up with Early Vacuum, Z-Axis
Down
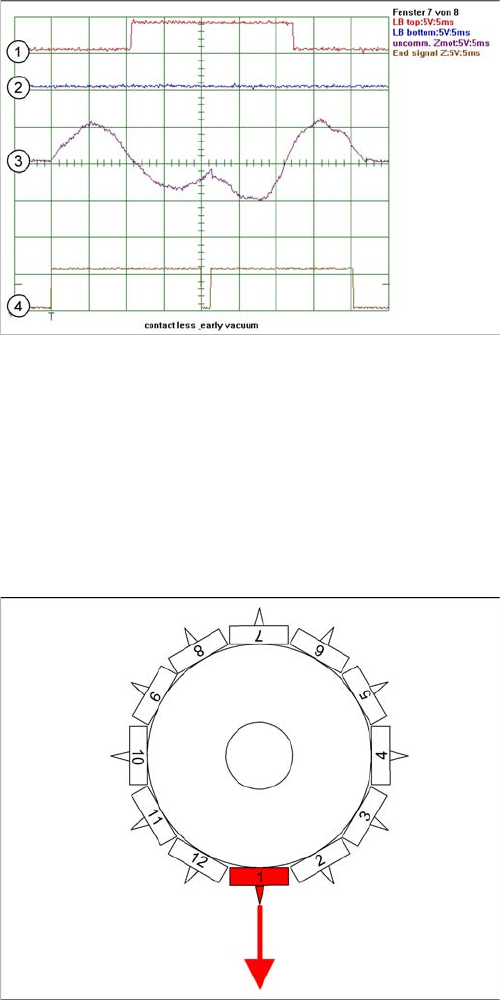
In this programming mode, early vacuum is also pro-
grammed, which is illustrated by the time between "end
signal downward" and "start upward".
Legend
1. Light barrier signal Z-axis LB top
2. Light barrier signal Z-axis LB bottom
3. Uncommutated motor current for Z-axis
4. End position signal for Z-axis
1. Section : Z-axis down (20 ms)
2. Section : Z-axis up (18 ms)
Special mode Z-axis down with "early vacuum" " vacuum
ON in top position"
Start gantry axes to pickup position of next feeder and
communication with changeover table:
▪ Start signal to gantry axes
▪ Signal for next feeder / this opens the feeder flap
End position signal for X/Y and star axes:
▪ End position signal for star axis
▪ Enables vacuum query: "segment airtight?" before
pickup
▪ X/Y end position signals available.
Z-axis starts:
▪ Positioning of Z-axis down
Light barrier (LB) up switches:
▪ Special procedure: valve positioning drive ON for
switching over to vacuum
▪ and releases LB down function
LB down switches:
▪ End position signal for positioning Z-axis down