00195440-05-SG_D-Series_FSE-EN.pdf - 第71页
4 Communication and Control 4.3.9 CAN Bus Processor Board on the Gantry Head Distributor 4.3 CAN Bus Student Guide SIPLACE D-Series (FSE) 71 4.3.8.1 4 . 3 . 8 . 1 C o m m u n ic a t io n D u r in g I m a g e A c q u is i…
4 Communication and Control
4.3 CAN Bus 4.3.8 Communication Siplace Vision
70 Student Guide SIPLACE D-Series (FSE)
4.3.8
4.3.8 Communication Siplace Vision
Communication Siplace Vision
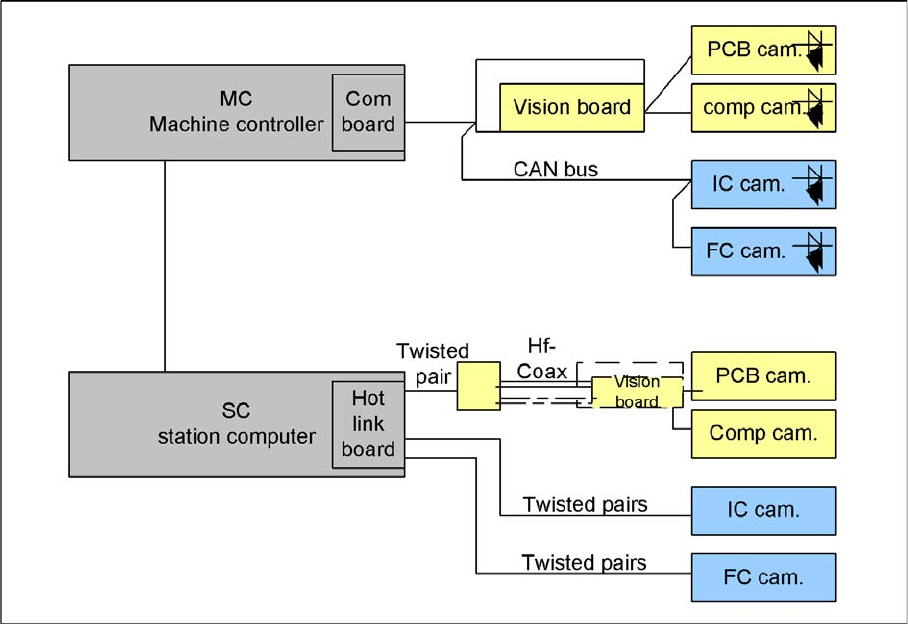
Overview Siplace Vision
The communication between the computers is carried out via LAN cables. The MC sends the commands
for the image acquisition to the vision computer and receives the result of the measuring. The MC also
sends the illumination values for the corresponding CSs. The pictures taken are sent digitally via the Hot
link card to the Vision task of the station computer, where they are evaluated. The result of this evalua-
tion (X/Y angle coordinates, good/bad state) is sent to the MC.
4 Communication and Control
4.3.9 CAN Bus Processor Board on the Gantry Head Distributor 4.3 CAN Bus
Student Guide SIPLACE D-Series (FSE) 71
4.3.8.1
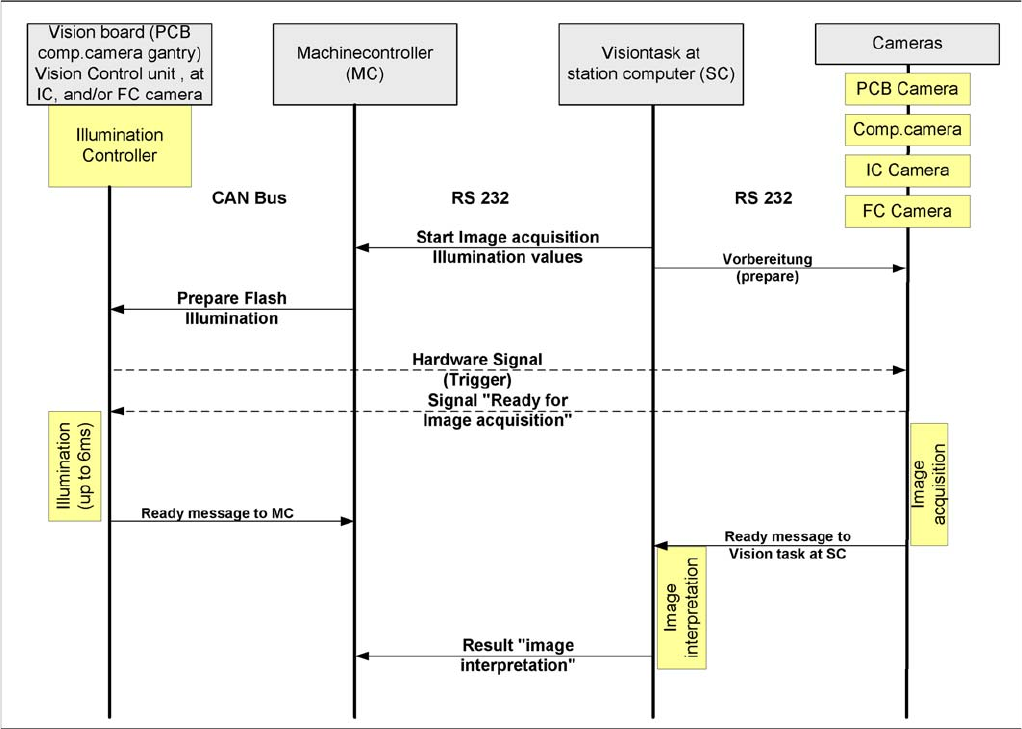
4.3.8.1 Communication During Image Acquisition
Communication During Image Acquisition
Time sequence from up to down for the communication image acquisition
The main communication between the vision system and machine controller is the transmission of illu-
mination values. These values, stored in the component shape, are sent via the CAN bus to the camera
concerned. When the camera is needed to take a picture, it will be activated by a trigger signal. From
this moment on the row of LEDs which provide the different illumination levels light dependent on the
illumination value 0-255. This illumination value can have 0 = dark up to 255 = bright. The length of the
illumination period is set by using a value between 0 and 255.
The maximum length of illumination is limited to 6 ms.
4.3.9
4.3.9 CAN Bus Processor Board on the Gantry Head Distributor
CAN Bus Processor Board on the Gantry Head Distributor
The TQM 167LC CAN bus processor board is connected to the head board. The processor board is used
at different places in the machine. If the processor board on the head board, the firmware provides at
the processor board the control of the head specific actuators and sensors no matter which head type is
installed.
4.3.9.1
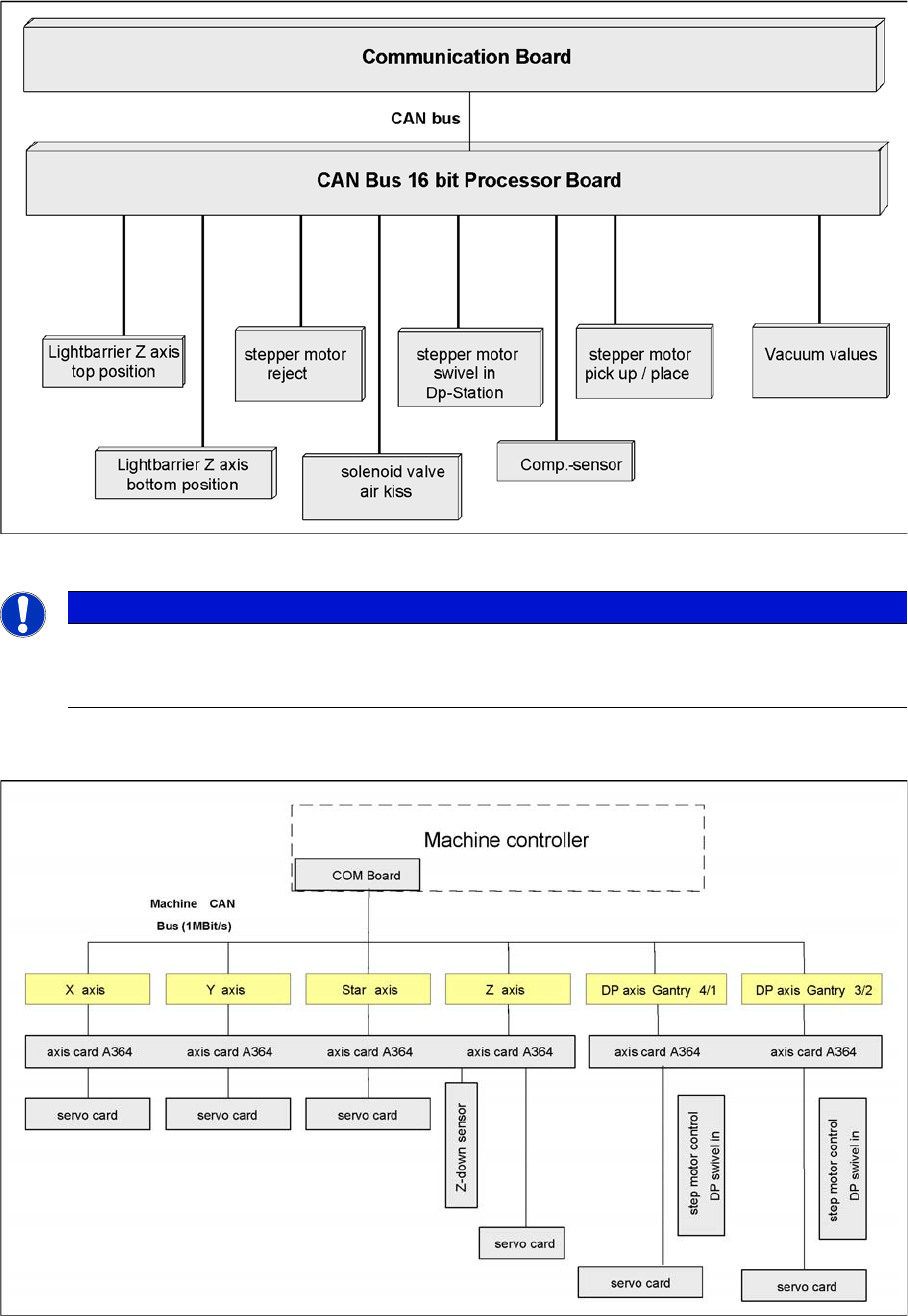
4.3.9.1 CAN BUS-Controlled Functions on the C&P12 Head
CAN BUS-Controlled Functions on the C&P12 Head
The following overview shows various head functions, controlled by the CAN system. Thus, the CAN bus
controls the actuators and sensors of the C&P head.
4 Communication and Control
4.3 CAN Bus 4.3.10 CAN Bus Communication with Axis Controller
72 Student Guide SIPLACE D-Series (FSE)
CAN function on C&P head
4.3.10
4.3.10 CAN Bus Communication with Axis Controller
CAN Bus Communication with Axis Controller
Overview axis controller
In previous Siplace placement machines, the communication and data flow between axis controller and
machine controller was achieved using the SMP bus. From the HF machine generation onwards, the
SMP bus is no longer used with the axis system.
NOTICE
The status of the 16 Bit PROCESSOR BOARD is indicated on the 7-segment display.
Normal status on the display is: Display shows slowly flashed " . (for description see Section
C&P12).