SM481_Service Manual.pdf - 第67页
Advanced High Speed Flexible Mounter 16 3. 全体程序完成 不按 Fr ont OP Panel 上的 < Rea dy> 按钮的状态 下 , 要确认 Mot or 的 I/ O 。 手 动传感器对各 Motor 确认 +/ - Li mit Sensor 及 Home Sensor 是否正常工作。 此时 , XY 轴必 须容易手动移动。 3.1.8. 设置设备间的通信 Interfa…
安装设备时的运转步骤
15
Reference
额定输入电压
: AC 200
±
18V / 208
±
19V / 220
±
20V / 240
±
22V / 3
80±25V / 415±28V, 50/60 Hz
耗电量: : 5.0 KVA
接地: 以第 3 种接地为基准, 地线和设备的 Mega Test 值应小于 100
Ω
AVR: AVR 设定是基本选项,建议用量 margin 大于 20%
注
意
如果从
3
相电提取单相电,可能产生
Trip
现象导致相歪曲而
使机器受到损伤,为避免发生这种情况,建议使用少于全部
额定功率(
Kw
)
40%
的单相电。
(
例
:Tray feeder
使用时
)
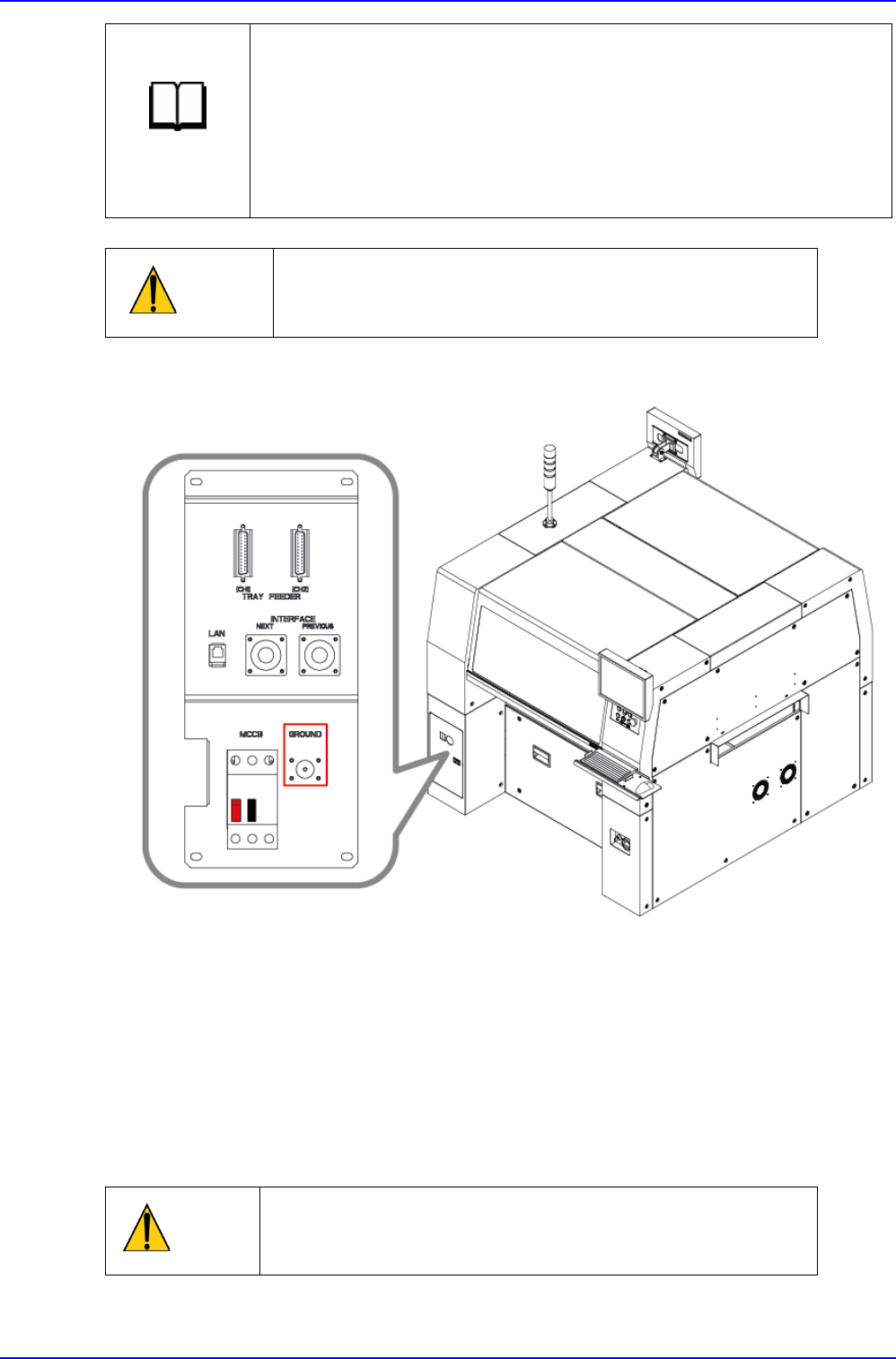
7. 必须利用主电源连接器下端的 FG 端子连接周边的设备。
3.1.7. Motor I/O 确认
3.1.7.1. 作业顺序
1. 在打开Main Switch前,再次检查确定设备内部或传送装置(Conveyor)上是否有任何障
碍。
2. 如果设备周边是干净的,打开Main Switch。 连接设备电源 此时请确认前、后面紧急
开关是否已撤销,并确认前、后门是否已关闭。
注
意
如果在打开
Main Switch
前不对电源及设备内部进行确认,有
可能造成设备损伤及人员受伤。在打开 Main Switch 前一定要
对设备内部及周边进行确认。
FG端子上需要连接Tray
Feede等周边器械
Advanced High Speed Flexible Mounter
16
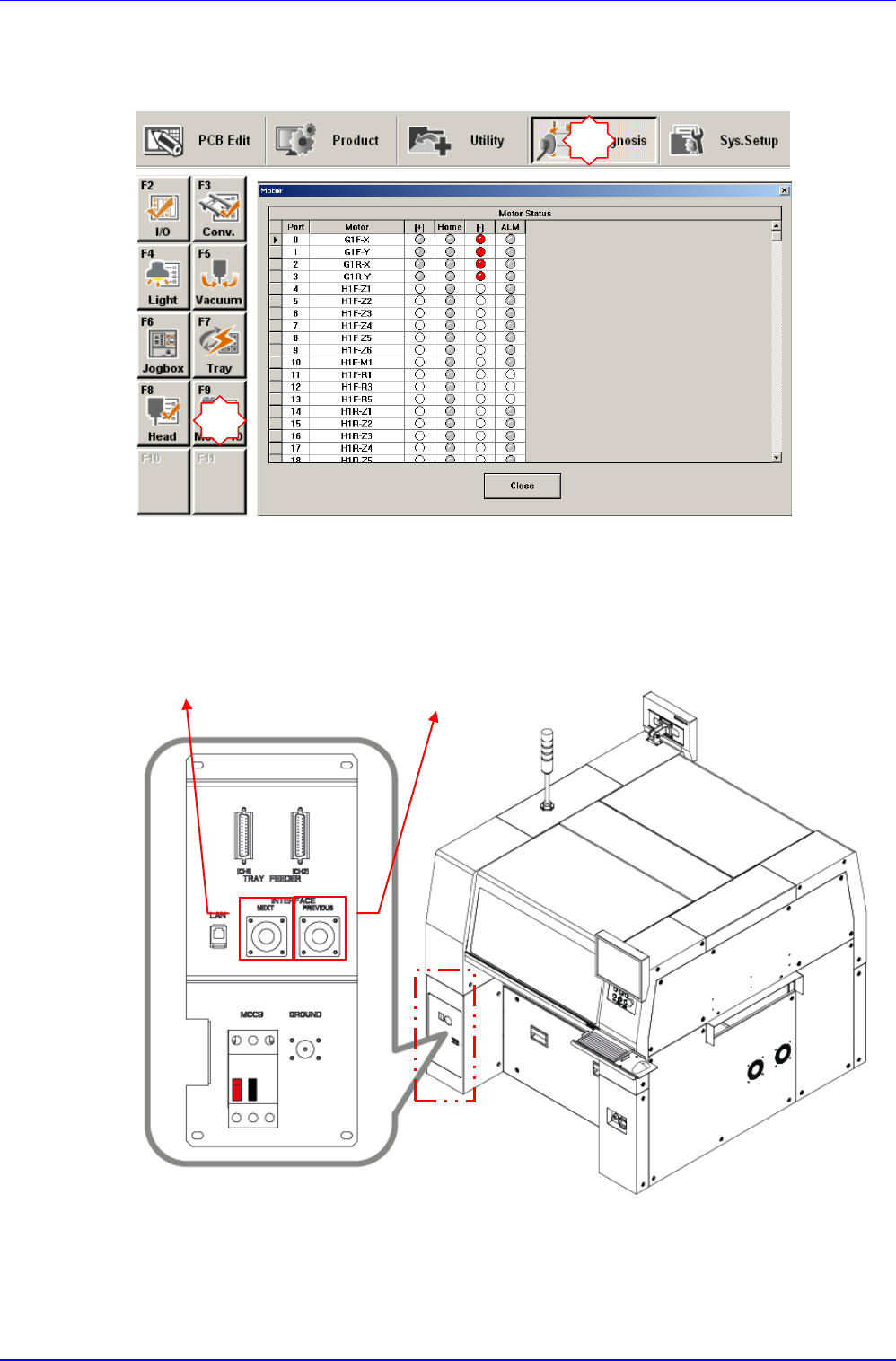
3. 全体程序完成 不按Front OP Panel上的<Ready>按钮的状态下, 要确认Motor的I/O。 手
动传感器对各Motor确认+/- Limit Sensor及Home Sensor是否正常工作。 此时, XY轴必
须容易手动移动。
3.1.8. 设置设备间的通信 Interface
1. 参照以下事项检查前一步和后一步过程的设备间的通信界面(interface)
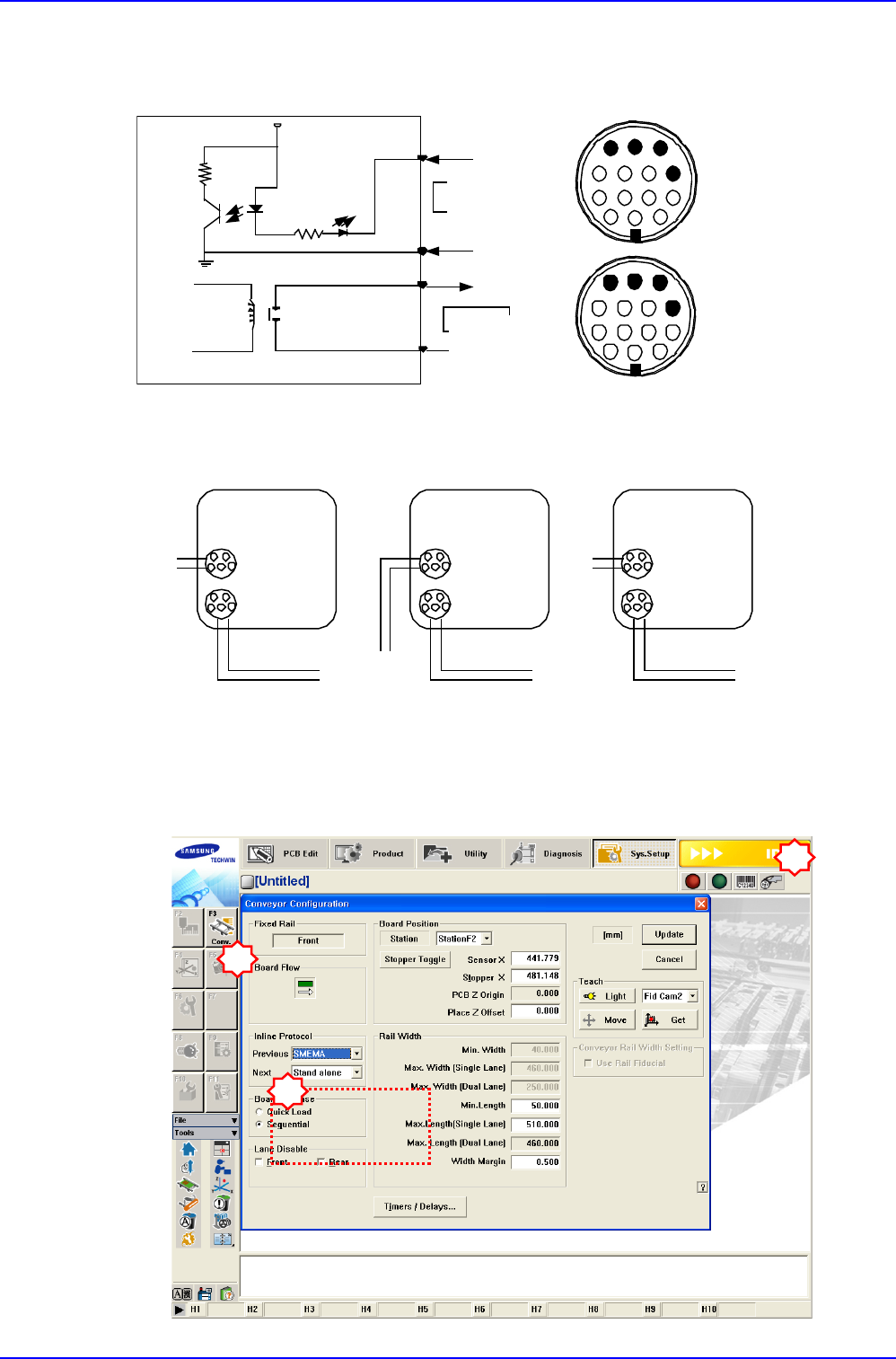
START 输入信号 (Cable No.:①〔+),②〔-))
输入信号是从下一步过程设备输出的,大部分信号端子测量出的电压大致为 20 ~22V
。
1
2
和以前装备的
电缆连接
和下一个装备
的电缆连接
安装设备时的运转步骤
17
READY 输出信号 (Cable No.:③ , ④ )
输出信号是从全部过程设备输出的,一般来说大部分当信号从端子输出时测量出的电阻
为 0Ω,如果没有输出信号电阻为∞Ω。
IN
OUT
①
②
③
④
①
②
③
④
출력단
입력단
DC24V〔+〕
①
②
③
④
DC 0V〔-〕
邻接设备的 I/F Connector Cable参照下图进行连接。
Unit#1 Unit#2 Unit#3
▶ ▶
PRE VI OUS (IN)
NEX T (OUT)
20~22V
①②
20~22V
①②
20~22V
①②
0 ~∞
Ω
③④
PRE VI OUS
(IN)
NEX T (
OUT)
PRE VI OUS
(IN)
NEX T (OUT)
0 ~
∞Ω
③
④
0 ~∞Ω
③④
对于规格不符合SMEMA代码如SIMENS, SANYO 和 TDK (RX-11), 以及无双接点I
NTERFACE的设备应作特殊检查。
jj需要决定设备的Interface Type。(根据用户环境请选择2接点方式或SMEMA方式
)
1号机
2号机
3号机
输入端
输出端
1
2
3