Ersa HF3_20 操作说明.pdf - 第273页
6|功能描述 6.17.16 中央支撑设置对话框 [电机],无法调节高度 在该对话框中可以设定中央支撑,进行其基准化。 提示 可以做任何修改吗? 进入这个页面需要拥有[设置]用户权利。 如果没有以用户名和密码登录,这些 设置就只能被查看。在这种情况下,应在键盘上按下[ESC 退出]键,或者在要求 输入密码的时候点击[取消]按钮。 我们只对传送带1的页面作出描述,描述的内容同样适用于其它所有的传送 带。 ü 打开设置对话框 [电机]:…
6|功能描述
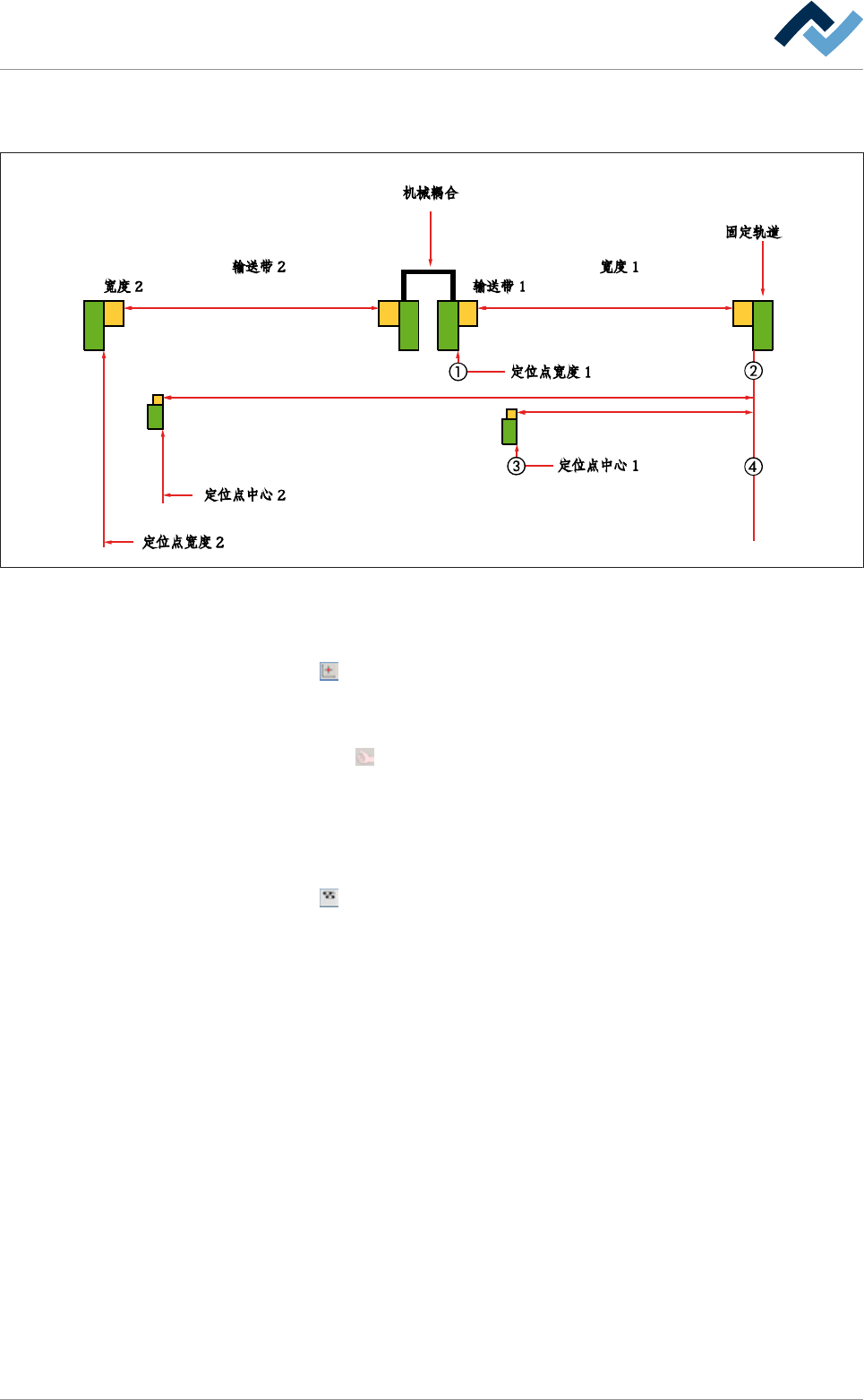
范例 c),没有硬件限位开关,不使用基准点法,各轨道机械连接在一
起
图101:
定位双带系统的宽度调整和中心支架
ü 定位宽度调整:
a) 打开[发动机]传送宽度调节设置页面:
b) 点击
按钮。
c) 测量两个输送轨道之间的实际距离(1) - (2)。
d) 点击[参考点位置] 输入框中并输入测量值。
e) 点击按钮
接受所作出的设置。
ð 此时,输入的值对应于新的定位。
ü 对定位进行检测:
a) 打开[传送宽度调节] 编辑页面。
b) 将一个以[mm]为单位的值输入到[设置値]输入框中。
c) 点击
按钮。
ð 此时输送器宽度被调整好。 当前输送器宽度可以在 [实测值]显示框
中看到,以[mm]为单位。 完成定位后:
d) 测量两个输送轨道之间的实际距离(1) - (2)。
ð 如果测量值与显示的[实测值]相同,定位程序得以完成。
Ersa GmbH
操作说明_HF3_20_zh|Rev. 7|2017/10/25 272/600

6|功能描述
6.17.16 中央支撑设置对话框 [电机],无法调节高度
在该对话框中可以设定中央支撑,进行其基准化。
提示
可以做任何修改吗?
进入这个页面需要拥有[设置]用户权利。 如果没有以用户名和密码登录,这些
设置就只能被查看。在这种情况下,应在键盘上按下[ESC 退出]键,或者在要求
输入密码的时候点击[取消]按钮。
我们只对传送带1的页面作出描述,描述的内容同样适用于其它所有的传送
带。
ü 打开设置对话框 [电机]:
a) 在 [中央支撑] 框的输入对话框 [传送宽度调节] 中点击按键
。
ð 出现设置对话框 [电机] [中央支撑]:
马达
设定速度
维护模式
中央支撑
齿轮比
电流极限
向左转为正方向
CAN地址
通讯OK
设置
实际速度
设定速度
实际电流
温度
状态指示
最大速度设定值
最小速度设定值
负公差
正公差
工作周期
发布周期
当前位置
维护模式
版本:
持续时间
每分钟转速
每分钟转速毫安
℃
每分钟转速
每分钟转速
mm
in MM
没有错误
参考点位置
最大位置
最小位置
毫安
mm
mm
mm
马达参考点状态
in MM
in MM
设置
绝对位置
h
h
传送宽度调节
初始化方向为负方向
参考点感应器(灰色=未感应)
正极限开关(绿灯=未感应)
负极限开关(绿灯=未感应)
图102:
设置对话框 [电机] [中央支撑]
[中央支撑] 框
– [齿轮比]: 输入传动比。 有关这方面的说明,请阅读驱动数据表。
– [电流极限]: 输入一个当前的限值[毫安]。 如果超过了被显示的值,将
会出现一个信息。
– [向左转为正方向]: 如果定位在电机轴逆时针旋转的情况下运行,应激
活该复选框。
Ersa GmbH
操作说明_HF3_20_zh|Rev. 7|2017/10/25 273/600

6|功能描述
– [CAN地址]: 指示出驱动器的CAN节点数。
– [通讯OK]指示出在发动机和PLC之间的通讯状态。 如果通讯OK,LED 灯会
显示为绿色。
– [版本:]发动机固件版本的显示。
– 实际速度]: 指示出当前发动机的速度[每分钟转速]。
– [设定速度]: 指示出发动机额定转速的设定值。
– [实际电流]: 指示出当前发动机的电流[毫安]。
– [温度]: 指示出当前发动机的温度[℃]。
– [状态指示]: 显示信息用于对机器的服务和诊断。
– [错误代码]: 显示信息用于对机器的服务和诊断。
– [最大速度设定值]: 显示出额定发动机速度的最大设置[每分钟转速]
– [最小速度设定值]: 显示出额定发动机速度的最小设置[每分钟转速]。
– [负公差]: 输入一个公差下限值[厘米/分钟]。 如果实际值低于公差下
限,会出现一个报错信息。
– [正公差]: 输入一个公差上限值[厘米/分钟]。 如果超过了公差上限,
会显示出一个报错信息。
[持续时间]框
– [工作周期]:指示出自试运行起驱动被接通电流时长;单位[h]。
– [发布周期]:指示出在机器处于[准备好信号操作模式时自试运行起驱动
运行了多长时间。
[设置]框
可以在参考点位置]输入区域中输入一个确定的参考位置。 有关这方面的说
明,请参考在这一段结尾中的使用范例。
ü 确定[硬件负限位开关]作为参考基准点:
a) 激活[初始化方向为负方向]复选框。
ð 此时[硬件负限位开关]成为一个参考基准点。 如果复选框没有被激活,
T10_I41[硬件正限位开关]就会被确定为参考基准点。
ü 设置最小/最大可能的输送器宽度:
a) 将最小/最大可能的输送器宽度输入到[最小位置] / [最大位置]输入区域
中。
ð 此程序完成。
ü 设置驱动的额定速度:
a) 将一个以[每分钟转速]为单位的值输入到[设定速度]输入区域中。
ð 这是发动机在定位过程中的运行速度。
ü 启动定位程序:
a) 点击按钮
。
ð 定位程序被启动。
状态显示在[设置]框中
– [参考点感应器(灰色=未感应)]指示出硬件基准开关的状态。 如果开关
没有被占用,LED 灯会显示为绿色。 如果开关被占用,LED 灯会显示为
灰色。
– [正极限开关(绿灯=未感应)]指示出在轴的正方向的硬件限位开关的状
态。 如果限位开关没有被占用,LED 灯会显示为绿色。 如果限位开关被
占用,会出现一个信息。
– [负极限开关(绿灯=未感应)]指示出在轴的负方向的状态。 如果限位开
关没有被占用,LED 灯会显示为绿色。 如果限位开关被占用,会出现一
个信息。
Ersa GmbH
操作说明_HF3_20_zh|Rev. 7|2017/10/25 274/600