Ersa HF3_20 操作说明.pdf - 第85页
5|调试 范例 b),没有硬件限位开关,不使用基准点法 图20: 定位双带系统的宽度调整和中心支架 ü 定位宽度调整: a) 打开[发动机]传送宽度调节设置页面: b) 点击[设置]下的 按钮。 c) 测量两个输送轨道之间的实际距离(1) - (2)。 d) 点击 [参考点位置]输入框并输入测量值。 e) 点击 按钮接受所作出的设置。 ð 此时,输入的值对应于新的定位。 ü 对定位进行检测: a) 打开[传送宽度调节] 编辑页面。…
5|调试
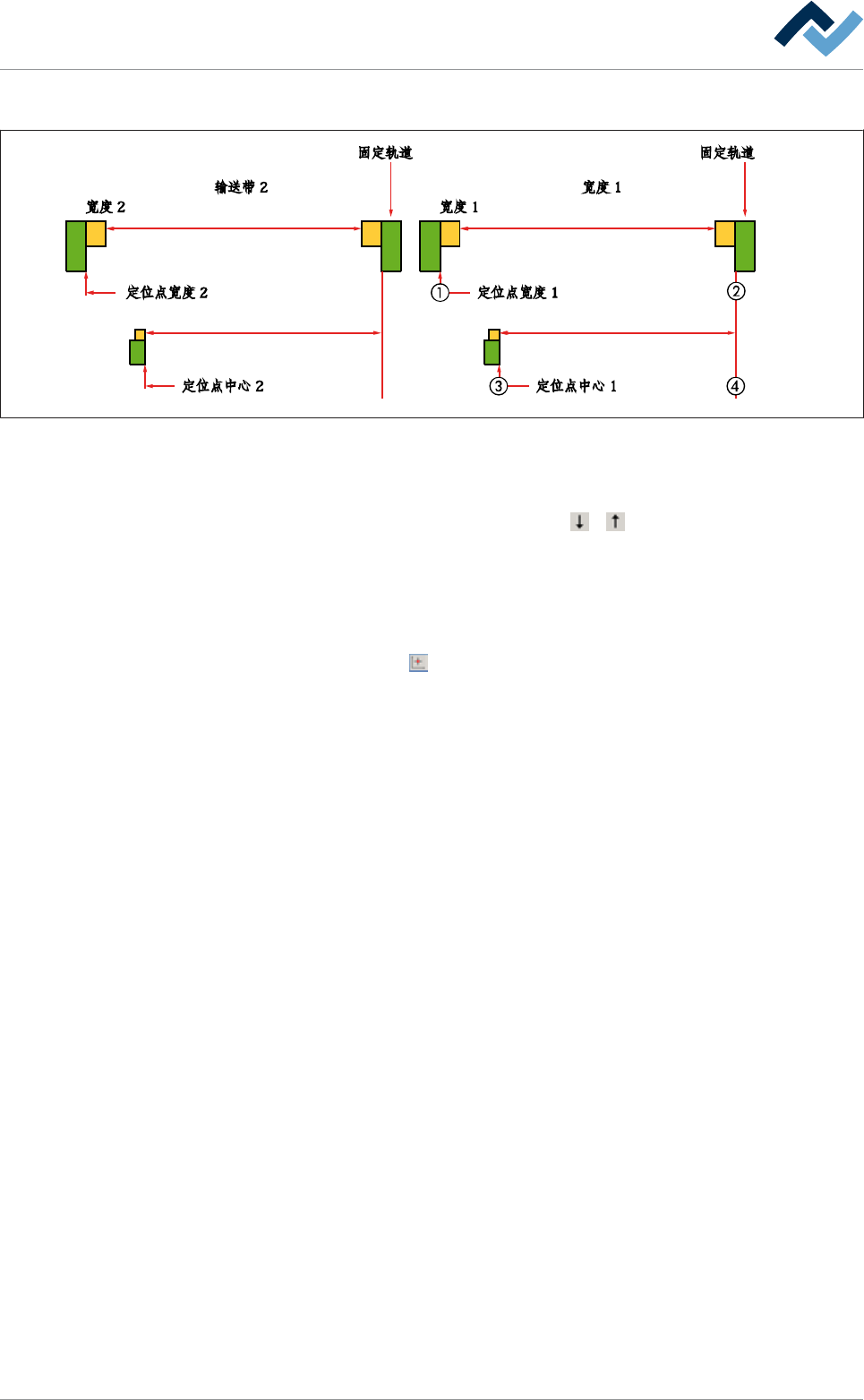
范例 a),带有硬件限位开关,使用基准点法。
图19:
定位双带系统的宽度调整和中心支架
ü 定位宽度调整:
a) 打开[传送宽度调节] 编辑页面。
b) 在[传输轨道宽度调节 1]框中,点住
或 按钮。
ð 这时可移动输送轨道会从硬件基准开关移向输送器的中心。
ð 一旦脱离基准开关后:
c) 放开按钮。
d) 打开[发动机]传送宽度调节设置页面。
e) 点击[设置]下的
按钮。
ð 定位程序开始。 这时可移动输送轨道开始向硬件基准限位开关移动直
到重新到达限位开关。 驱动被停止,然后立即向相反的方向移动。
驱动完成定位。 [马达参考点状态]状态显示为绿色。
f) 测量两个输送轨道之间的实际距离(1) - (2)。
ð 如果测量值与显示的[实测值]相符,定位程序得以完成。
Ersa GmbH
操作说明_HF3_20_zh|Rev. 7|2017/10/25 84/600
5|调试
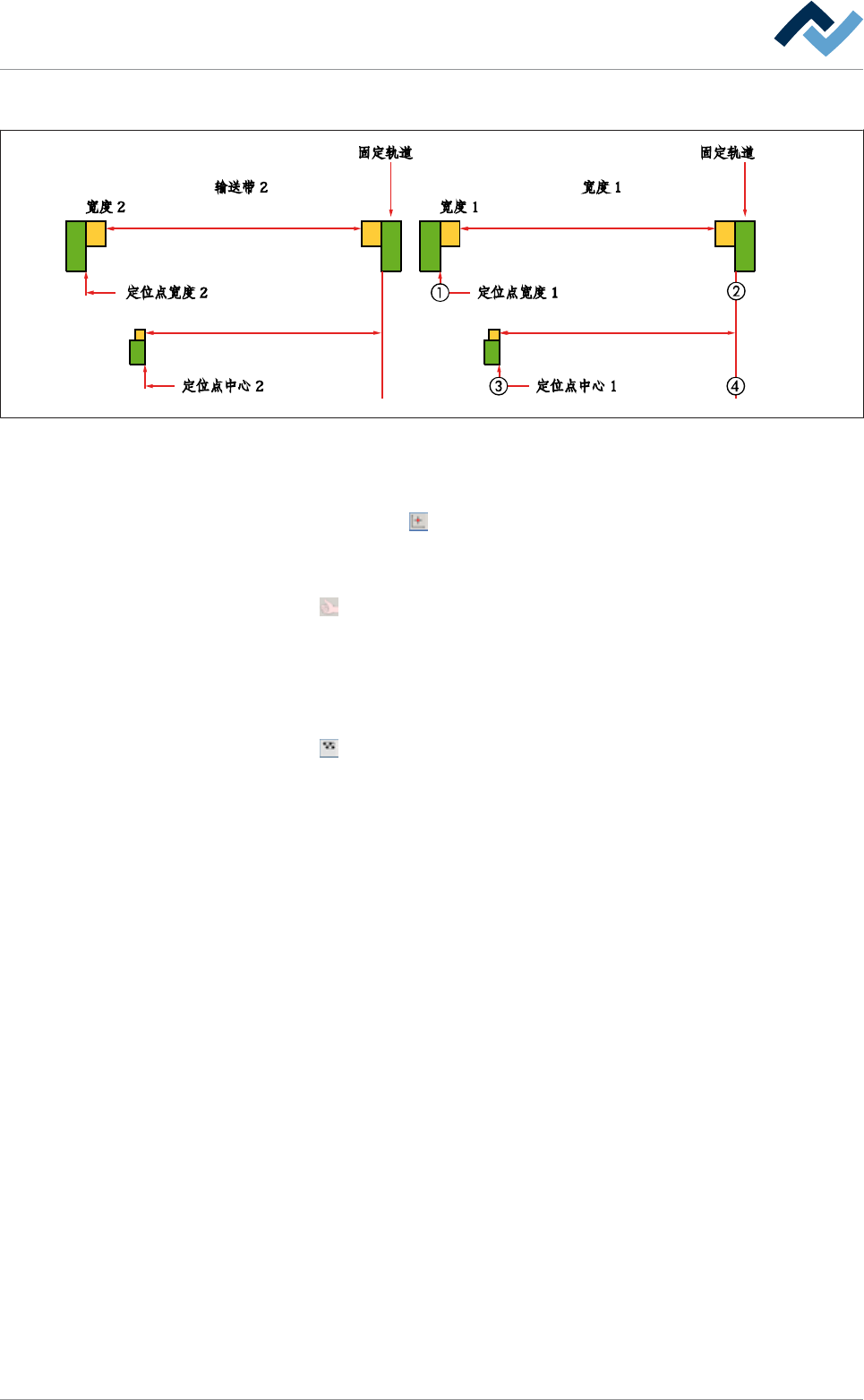
范例 b),没有硬件限位开关,不使用基准点法
图20:
定位双带系统的宽度调整和中心支架
ü 定位宽度调整:
a) 打开[发动机]传送宽度调节设置页面:
b) 点击[设置]下的
按钮。
c) 测量两个输送轨道之间的实际距离(1) - (2)。
d) 点击 [参考点位置]输入框并输入测量值。
e) 点击
按钮接受所作出的设置。
ð 此时,输入的值对应于新的定位。
ü 对定位进行检测:
a) 打开[传送宽度调节] 编辑页面。
b) 将一个以[mm]为单位的值输入到[设置値]输入框中。
c) 点击
按钮。
ð 此时输送器宽度被调整好。 当前输送器宽度可以在 [实测值]显示框
中看到,以[mm]为单位。 完成定位后:
d) 测量两个输送轨道之间的实际距离(1) - (2)。
ð 如果测量值与显示的[实测值]相符,定位程序得以完成。
Ersa GmbH
操作说明_HF3_20_zh|Rev. 7|2017/10/25 85/600
5|调试
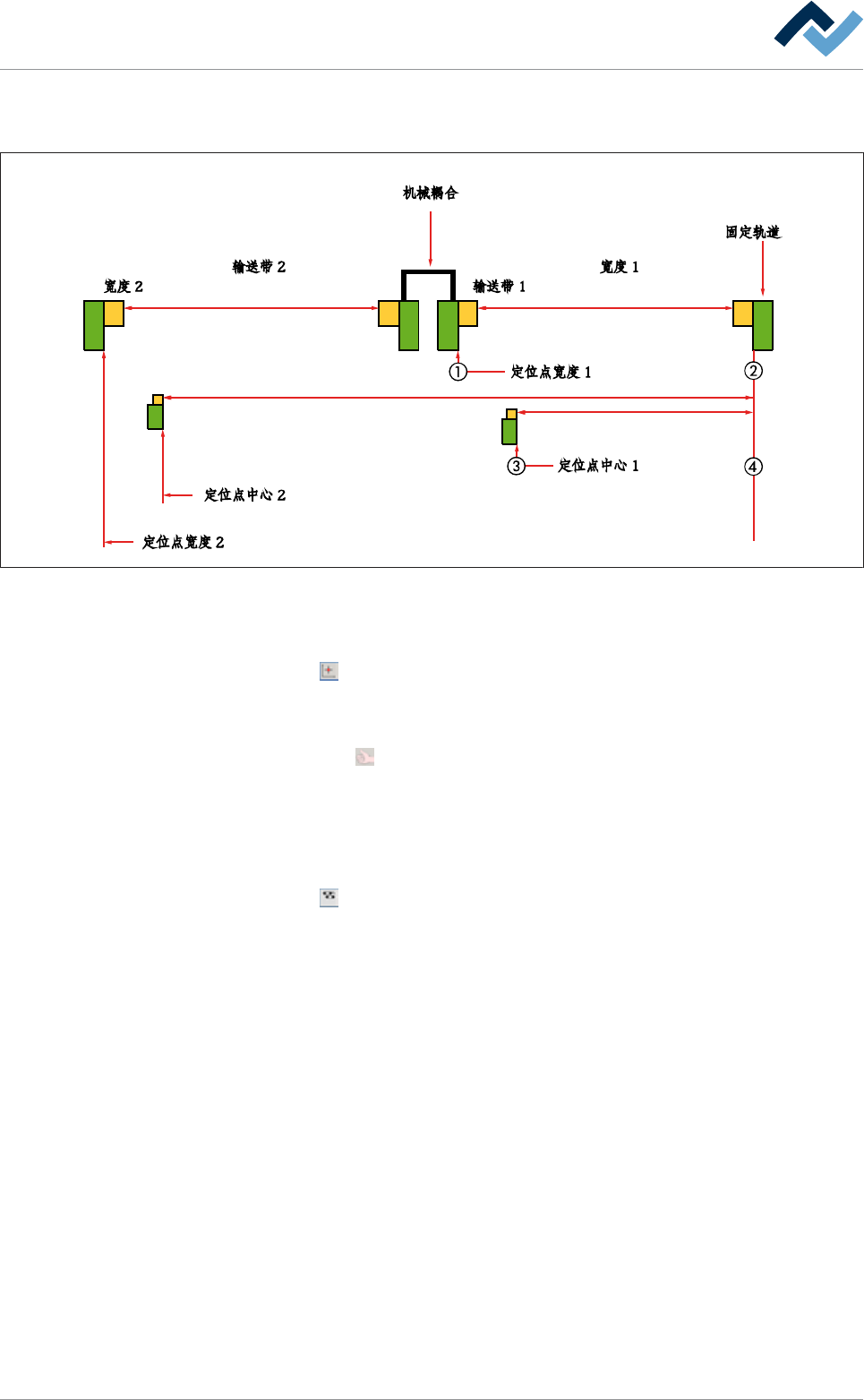
范例 c),没有硬件限位开关,不使用基准点法,各轨道机械连接在一
起
图21:
定位双带系统的宽度调整和中心支架
ü 定位宽度调整:
a) 打开[发动机]传送宽度调节设置页面:
b) 点击
按钮。
c) 测量两个输送轨道之间的实际距离(1) - (2)。
d) 点击[参考点位置] 输入框中并输入测量值。
e) 点击按钮
接受所作出的设置。
ð 此时,输入的值对应于新的定位。
ü 对定位进行检测:
a) 打开[传送宽度调节] 编辑页面。
b) 将一个以[mm]为单位的值输入到[设置値]输入框中。
c) 点击
按钮。
ð 此时输送器宽度被调整好。 当前输送器宽度可以在 [实测值]显示框
中看到,以[mm]为单位。 完成定位后:
d) 测量两个输送轨道之间的实际距离(1) - (2)。
ð 如果测量值与显示的[实测值]相同,定位程序得以完成。
Ersa GmbH
操作说明_HF3_20_zh|Rev. 7|2017/10/25 86/600