UR5_User_Manual_zh_Global.pdf - 第109页
13.4 自动移动选项卡 动画 动画显示机器人手臂将要进行的动作。 小心 : 比较动画和真 实机器人手臂 的位置,确保机 器人手臂可以 安全地运 动,不会打到障碍物。 小心 : 自动移动功能 使机器人沿着 阴影区轨道移 动。碰撞可能会 损坏机器 人或其他设备。 自动 按住 自 动 按 钮可 按 动画 所 示移 动 机器 人手 臂。 注意: 可随 时 释放 该按 钮, 使机 器 人 停止运动! 手动 按下 手动 按钮,将跳 转至 移动选项…
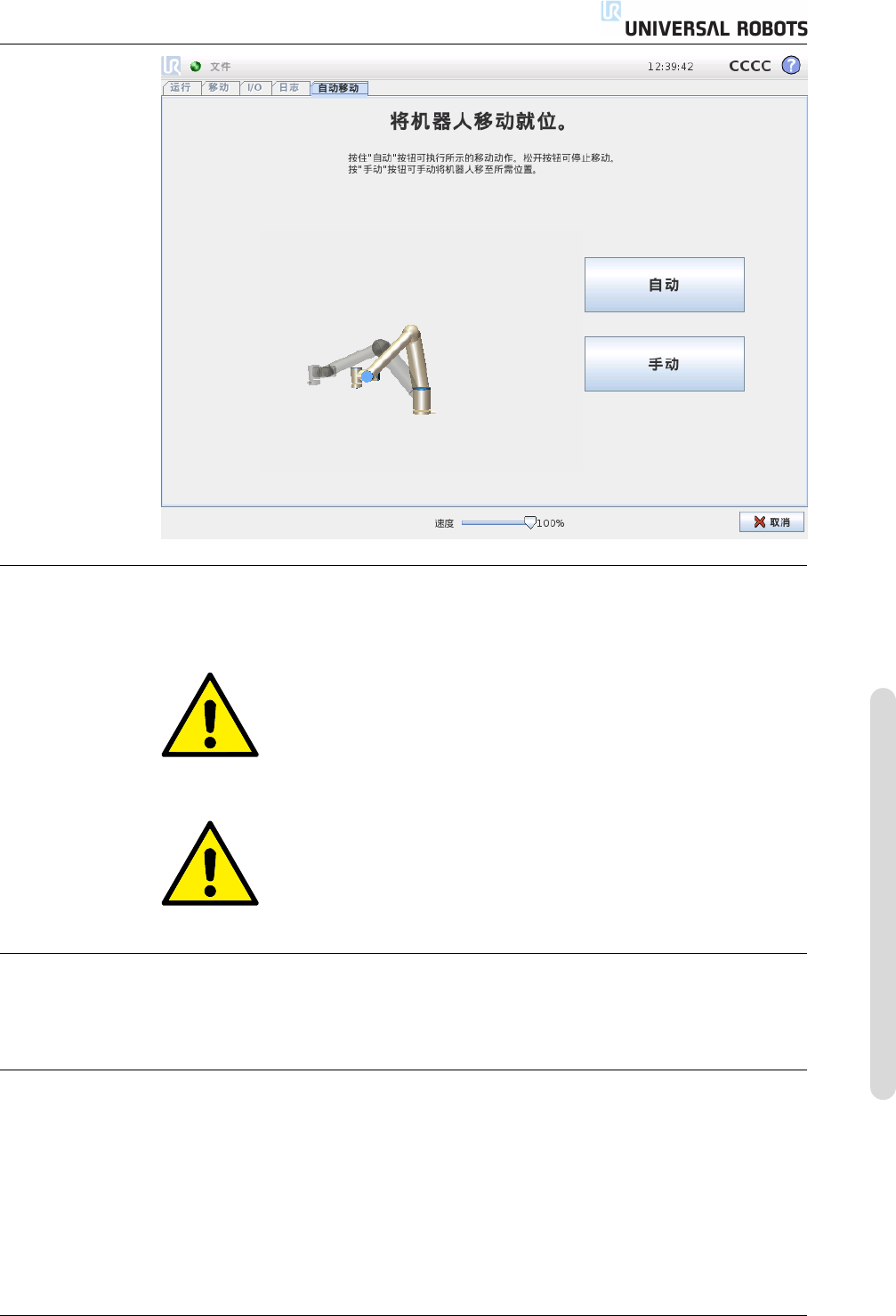
13.4 自动移动选项卡
动画
动画显示机器人手臂将要进行的动作。
小心:
比较动画和真实机器人手臂的位置,确保机器人手臂可以安全地运
动,不会打到障碍物。
小心:
自动移动功能使机器人沿着阴影区轨道移动。碰撞可能会损坏机器
人或其他设备。
自动
按住自动按钮可按动画所示移动机器人手臂。注意:可随时释放该按钮,使机器人
停止运动!
手动
按下手动按钮,将跳转至移动选项卡,在这里可以手动移动机器人手臂。如果动画中
的运动不理想,则可以采用手动模式。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-35 CB3
13.5 安装设置 → 加载/保存
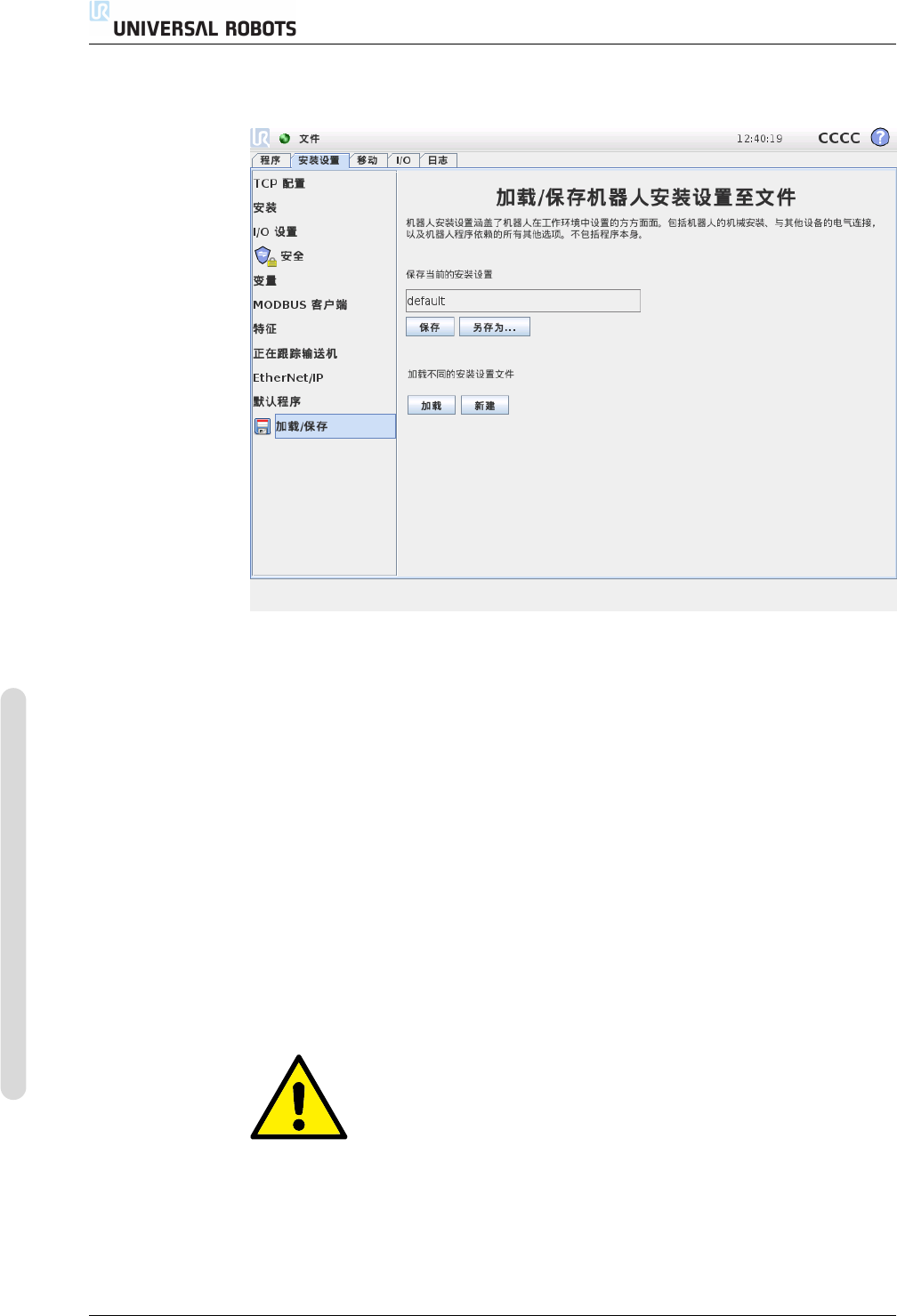
13.5 安装设置 → 加载/保存
机器人安装设置涵盖了机器人在工作环境中设置的方方面面。包括机器人手臂的机
械安装、与其他设备的电气连接,以及机器人程序依赖的所有其他选项。不包括程
序本身。
这些设置可使用 安装设置 选项卡下的各个屏幕进行设置,有一个例外就是 I/O 域
在 I/O 选项卡中进行设置 (请查阅 13.2)。
可以为机器人保存多份安装设置文件。所创建的程序将使用当前处于激活状态的安
装设置,在使用程序时会自动加载此安装设置。
对安装设置所做的任何更改均需要进行保存,以备断电后能够得以保留。如果安装
设置中有未保存的更改, 安装设置 选项卡左边的加载/保存文本附件会出现一个软盘
图标。
按下保存或另存为. . . 按钮可保存安装设置。此外,保存程序也会保存处于激活状态
的安装设置。请使用加载按钮来加载另一个安装设置文件。新建按钮重置机器人安
装设置中的所有设置,使其恢复出厂设置。
小心:
不推荐使用 USB 驱动器加载机器人安装设置。要使用 USB 驱动
器里面存储的安装设置,需首先加载该安装设置,然后使用 另存
为. . . 按钮将其保存在本地程序文件夹中。
CB3 II-36 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。