UR5_User_Manual_zh_Global.pdf - 第121页
13.12 安装 → 特征 添加直线 按此按 钮可 在安 装设置 中添 加直线 特征。 直线由 两个 点特 征之间 的轴 来定义。 此轴 由第一个点指向第 二个点,将构成直线坐标 系的 y 轴。直 线坐标系的 z 轴由第一个 子点的 z 轴 投射到 线段垂面 上的投 影来定义。 直线坐 标系的位 置与第 一个子点 的位 置相同。 版本 3.2 (rev. 18629) . . 版权所有 © 2009-2015 Universal Rob…
13.12 安装 → 特征
• 是否 可 以将机器 人向远离 我的数控(computerised numerically controlled,
CNC)机床方向移动 4 cm?
• 是否可以将机器人工具旋转至与机床呈 45 度角?
• 我们是否可以让机器人手臂携带工件垂直向下运动,然后松开工件,再垂直向
上运动?
对于想要在生产车间各种工位上使用机器人手臂的一般客户而言,此种问题的意义
不言而喻,因此在告知客户此类相关问题没有一蹴而就的简单答案时,客户会显得
懊恼和难以理解。此情况的出现有若干复杂原因,针对这些问题,Universal Robots
开发了一些独特而又简单的方法,让客户可以指定各对象相对于机器人手臂的位
置。因此,客户只需执行几个步骤,即可完美解决上述问题。
重命名
使用此按钮可对特征进行重命名。
删除
使用此按钮可删除所选特征及存在的任何子特征。
显示坐标轴
选择是否在 3D 视角中显示所选特征的坐标轴。该选择适用于此屏幕和 “移动” 屏
幕。
可唤醒
选择所选特征是否将可唤醒。这确定该特征是否将显示在 “移动” 屏幕的特征菜单
中。
变量
选择所选特征是否可用作变量。如果选中此选项,编辑机器人程序时,将可使用以
特征名称后面加 “ var” 命名的变量,而且可以在程序中为此变量分配一个新值,然
后可用其控制依赖于特征值的路点。
设置或更改位置
使用此按钮可设置或更改所选特征。单击按钮后将显示 “移动” 屏幕,可在其中设
置特征的新位置。
将机器人移至特征位置
按此按钮可将机器人手臂移向所选特征。移动结束后,特征的坐标系和 TCP 的坐
标系将重合,差异是 x 轴有 180 度的旋转。
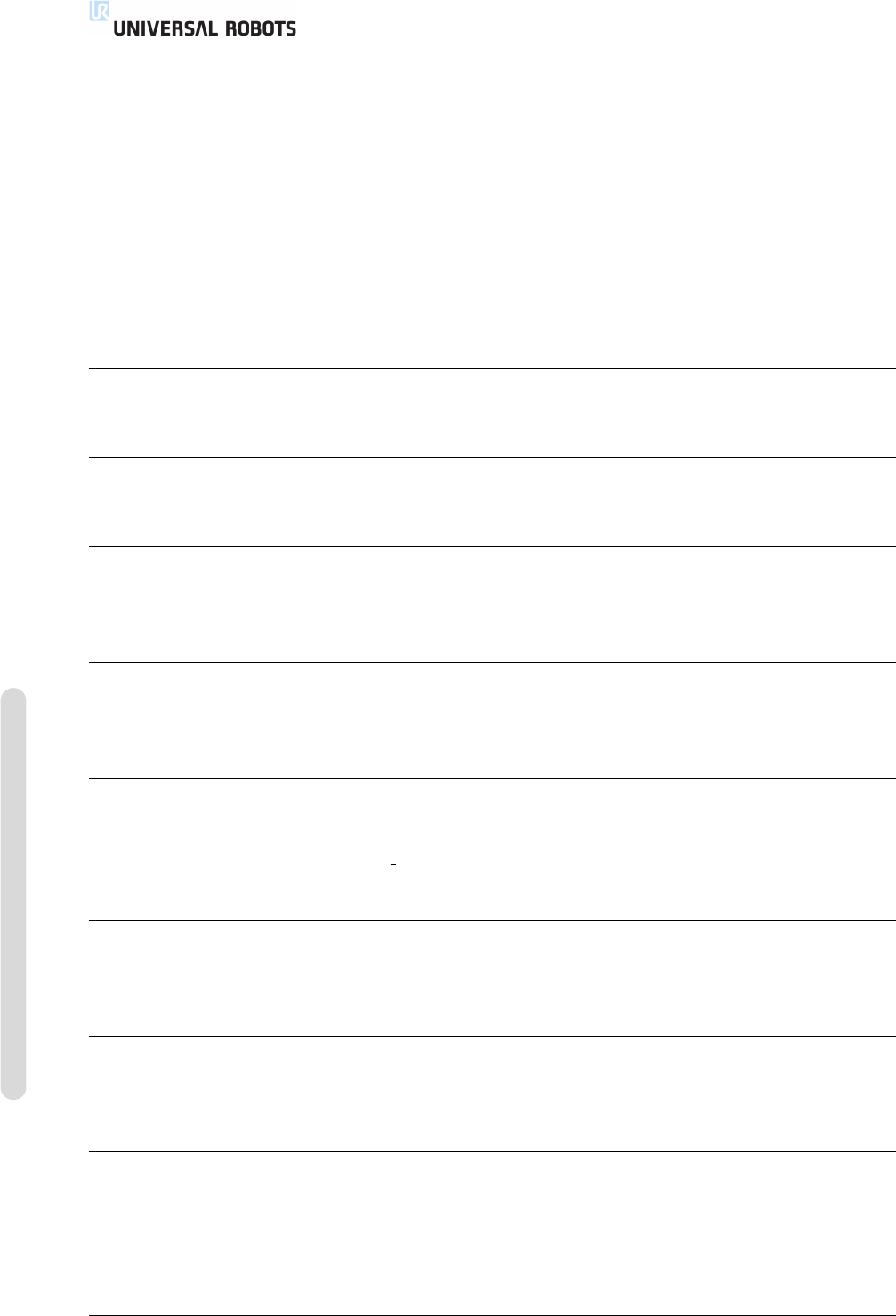
添加点
按此按钮可在安装设置中添加点特征。点特征的位置由 TCP 在该点的位置来定
义。点特征的方向与 TCP 方向相同,只不过特征坐标系是绕其 x 轴旋转 180 度。
这使得点特征的 z 轴与该点 TCP 的 z 轴相反。
CB3 II-46 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
13.12 安装 → 特征
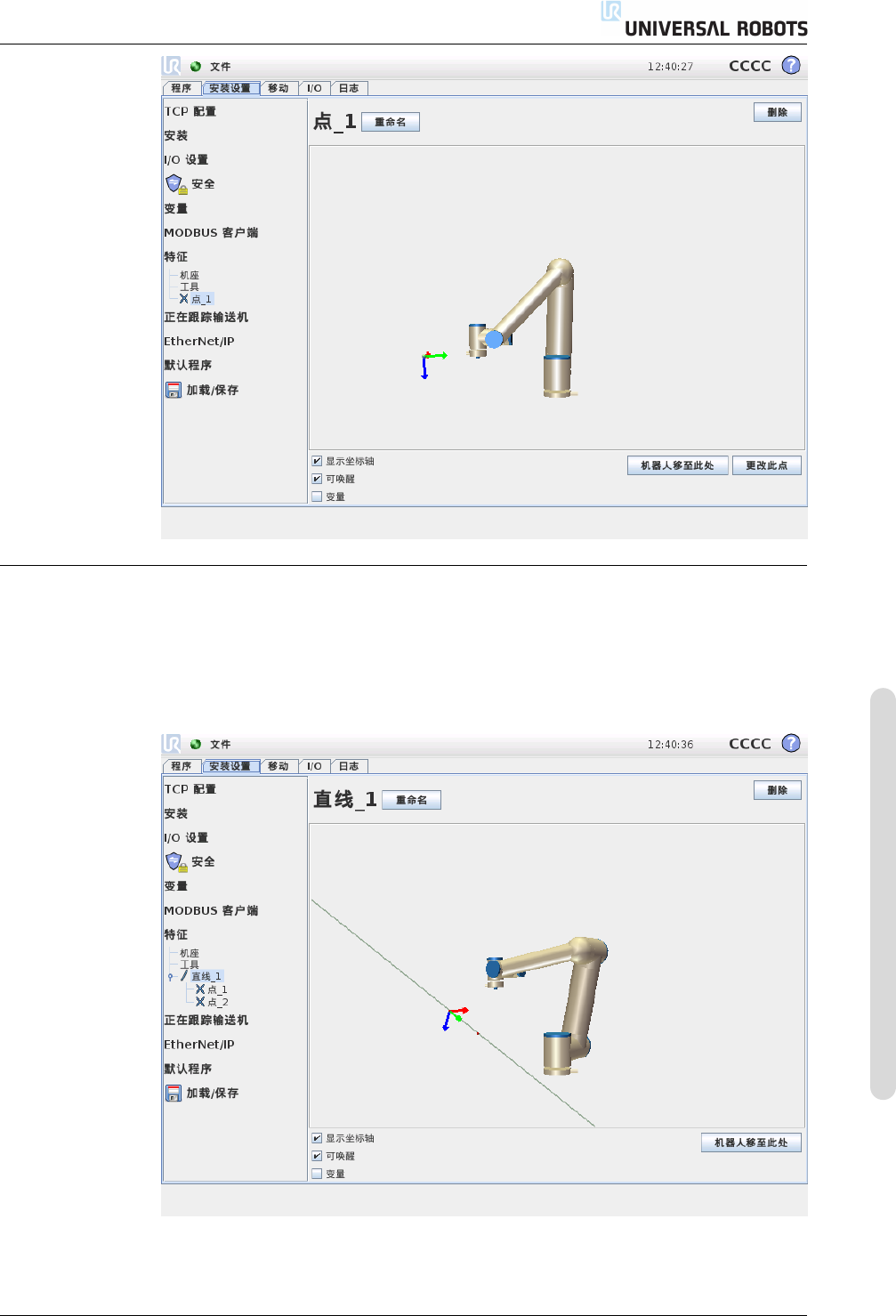
添加直线
按此按钮可在安装设置中添加直线特征。直线由两个点特征之间的轴来定义。此轴
由第一个点指向第二个点,将构成直线坐标系的 y 轴。直线坐标系的 z 轴由第一个
子点的 z 轴投射到线段垂面上的投影来定义。直线坐标系的位置与第一个子点的位
置相同。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-47 CB3
13.13 输送机跟踪设置
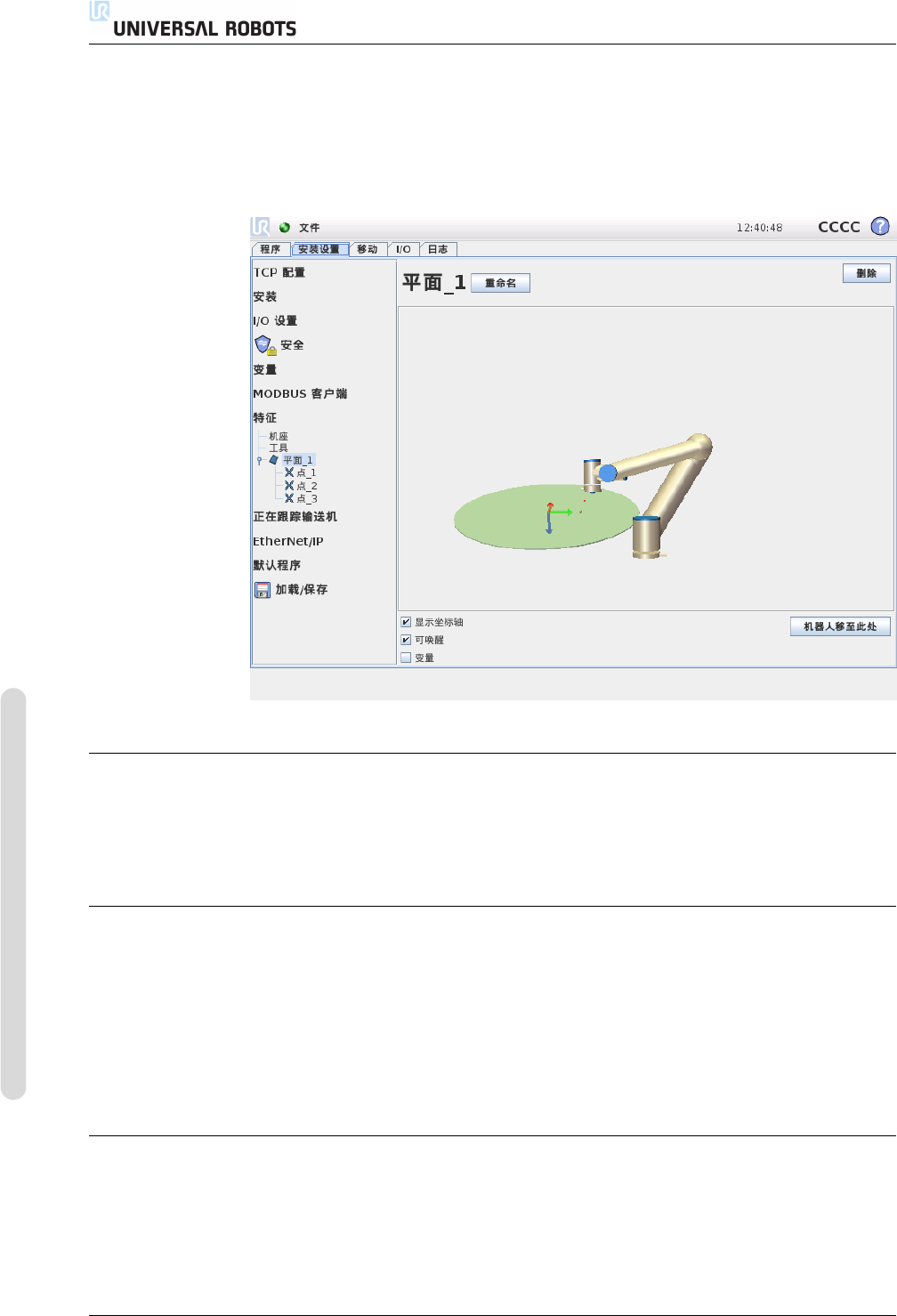
添加平面
按此按钮可在安装设置中添加平面特征。平面由三个子点特征来定义。坐标系的位
置与第一个子点的位置相同。z 轴为平面法线,从第一个点指向第二个点的轴为 y
轴。z 轴的正方向设置要使平面的 z 轴与第一点的 z 轴之间夹角小于 180 度。
13.13 输送机跟踪设置
当使用输送机时,可对机器人进行配置以跟踪它的移动。 “输送机跟踪设置” 提供
配置机器人的选项,可将其配置为与绝对和增量式编码器以及线性和圆形输送机一
起工作。
输送机参数
增量式编码器可连接数字输入端 0 ~ 3。数字信号的解码以 40kHz 的频率运行。利
用正交编码器(要求两个输入端),机器人可以判断速度以及输送机的方向。如果输
送机的方向恒定,可利用单个输入端来检测上升、下降或上升和下降边缘以确定输送
机的速度。
当通过 MODBUS 信号连接时,绝对编码器可以使用。这需要在 13.11中预先配置一
个数字式 MODBUS 输入寄存器。
线性输送机
当选择了线性输送机时,必须配置直线特征以确定输送机的方向。直线特征应与输
送机的方向平行,在定义直线特征的两点之间应有一个较大的距离。建议在示教两
点时将工具牢牢地顶着输送机的侧面放置来配置直线特征。
CB3 II-48 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。