UR5_User_Manual_zh_Global.pdf - 第128页
13.17 运行选项卡 CB3 I I-54 版本 3.2 (rev. 18629) . . 版权所有 © 2009-2015 Universal Rob ots A/S 。保留所有权利。

13.17 运行选项卡
CB3 II-54 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
.
.14 编程
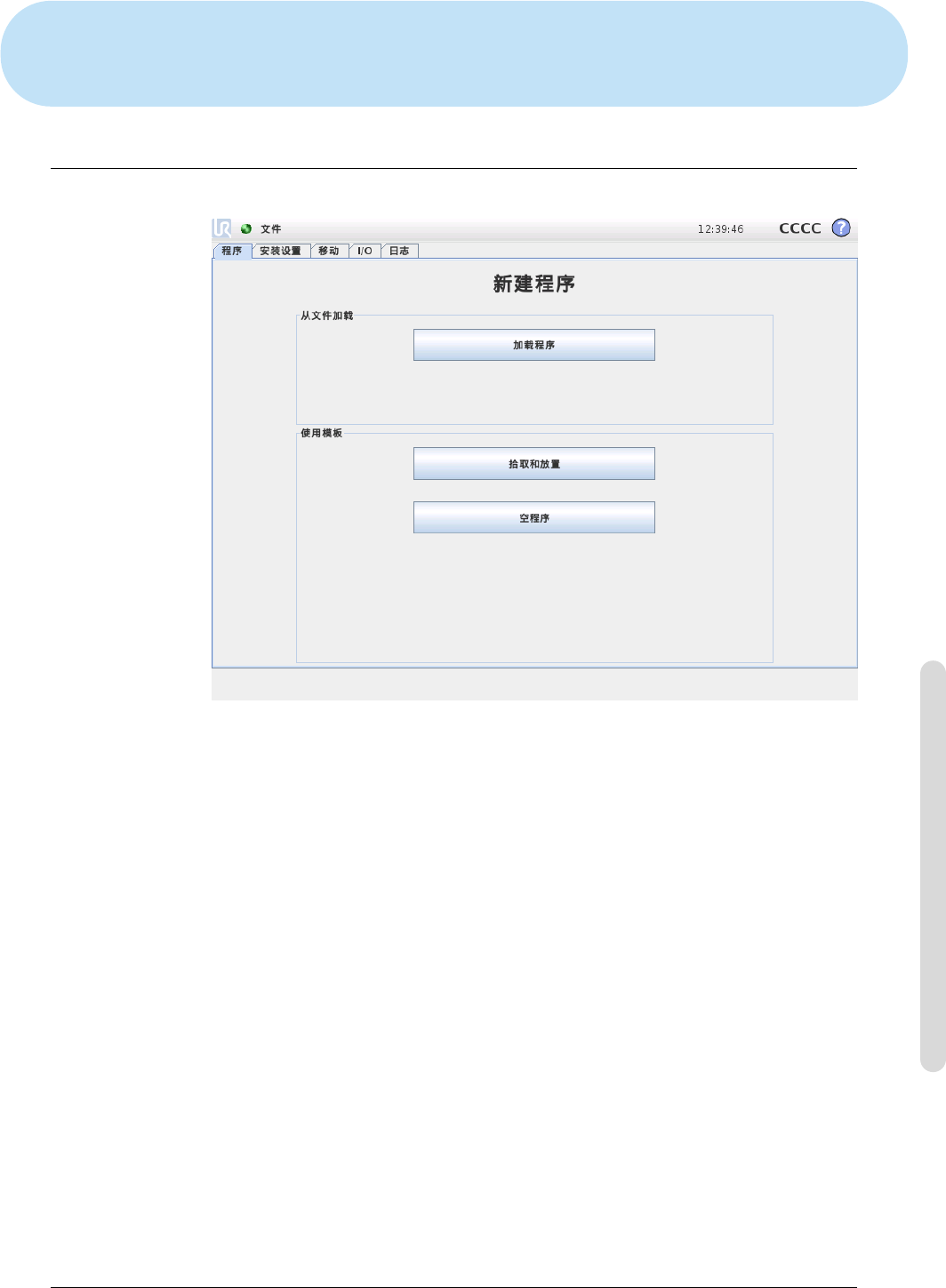
14.1 新建程序
新机器人程序可以通过套用模板或参照现有(已保存)机器人程序来创建。模板提
供整个程序结构,只需填写程序的细节内容即可。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-55 CB3