UR5_User_Manual_zh_Global.pdf - 第134页
14.5 命令:移动 “ 移 动 ” 命 令 通 过基 本路 点控 制机 器 人的 运动。 路 点必 须 置于 “ 运动 ” 命令 下。 “ 移 动 ” 命令定义机器人手臂在这些路点之间的加速度和移动速度。 移动类型 可从以 下三种 移动方 式进行选 择:下文 分别对 Mov eJ 、 Mo v eL 和 Mov eP 进行 了说 明。 • mov eJ 将在机器人手臂 关节区 内执行所 计算的移动。系统同 时控制每个关节运 动至所需 …
14.4 命令:空
14.4 命令:空
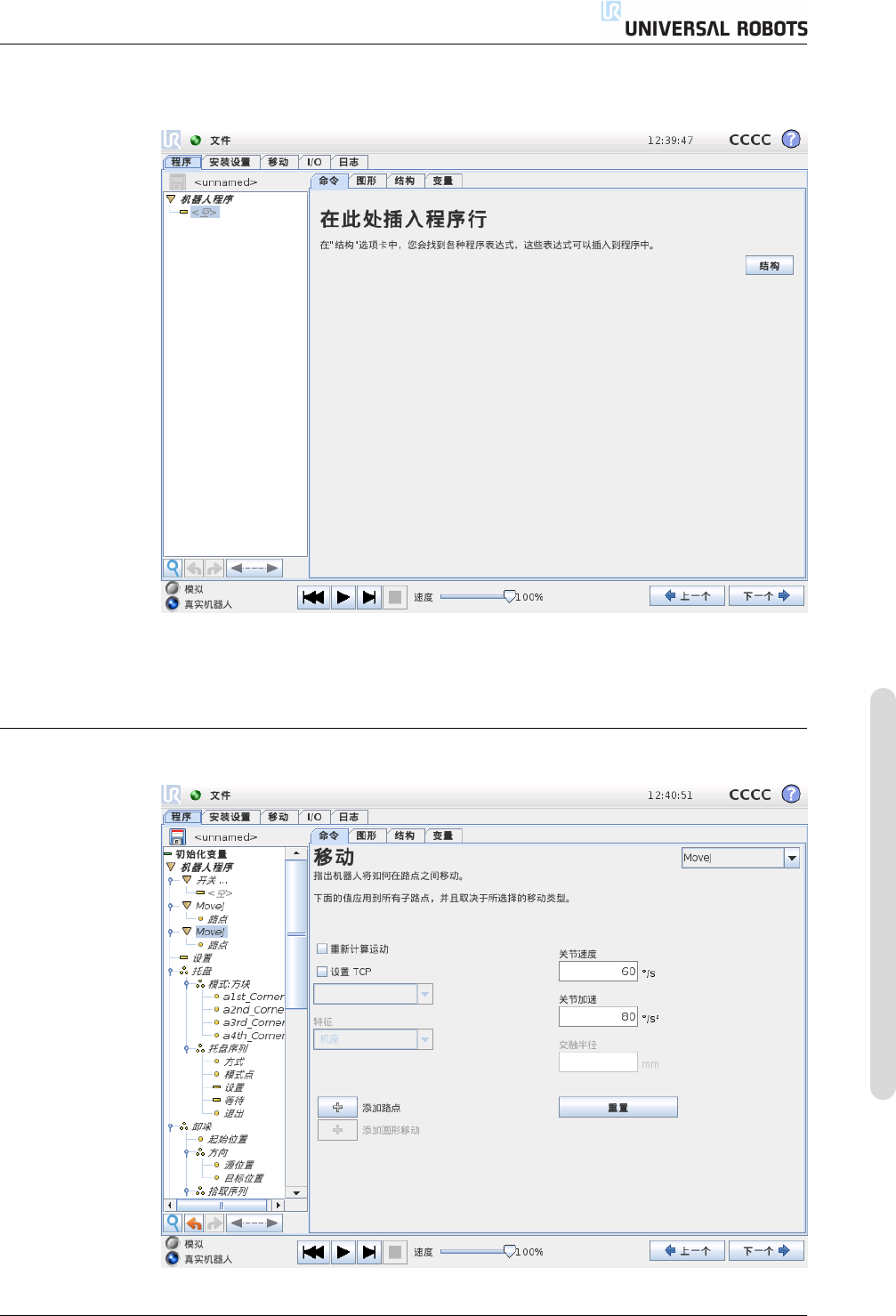
“程序” 命令需从此处插入。按结构按钮转至 “结构” 选项卡,在此选项卡中可找到
各种可选用的程序行。指定并定义所有程序行后,程序方可运行。
14.5 命令:移动
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-59 CB3
14.5 命令:移动
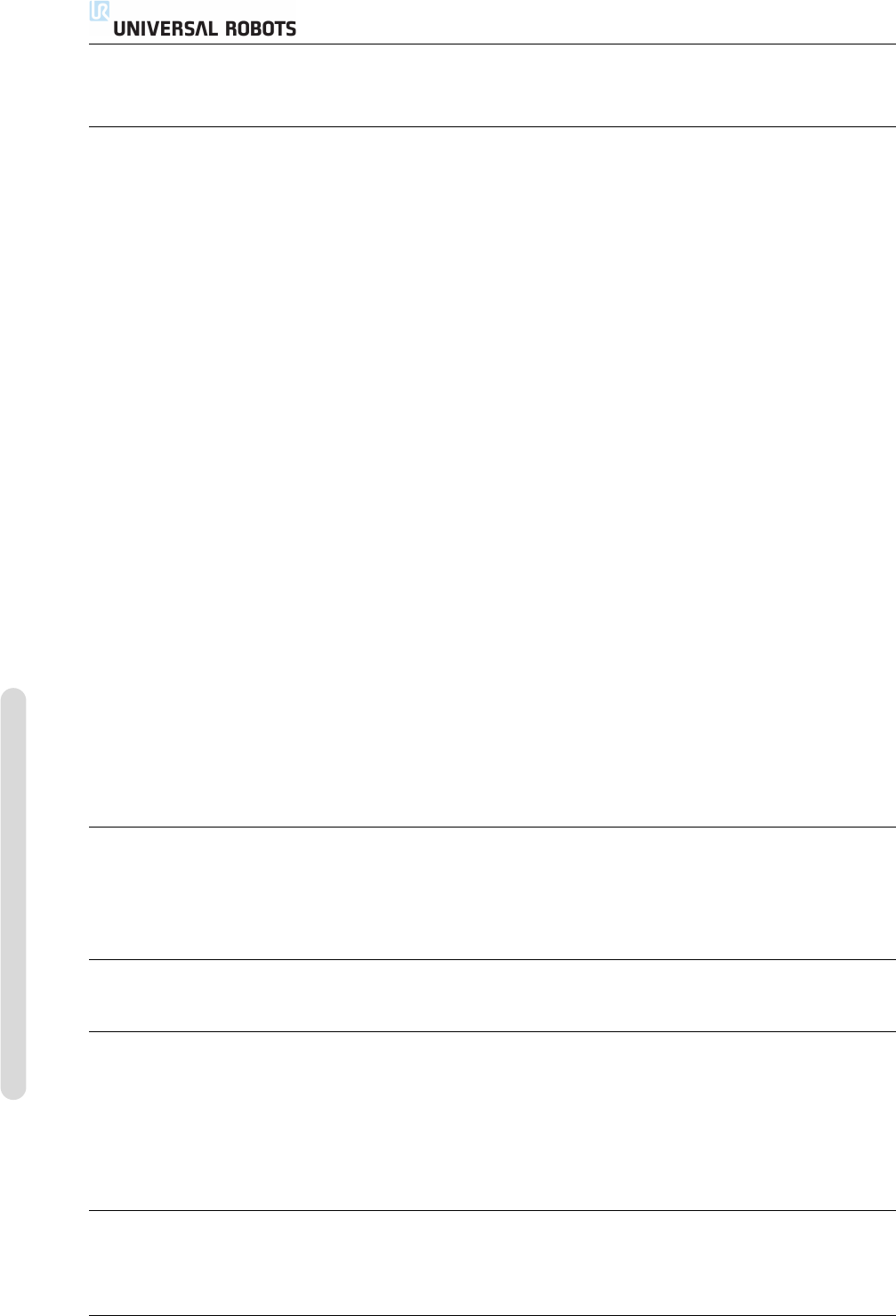
“移动” 命令通过基本路点控制机器人的运动。路点必须置于 “运动” 命令下。“移
动” 命令定义机器人手臂在这些路点之间的加速度和移动速度。
移动类型
可从以下三种移动方式进行选择:下文分别对 MoveJ、MoveL 和 MoveP 进行了说
明。
• moveJ 将在机器人手臂关节区内执行所计算的移动。系统同时控制每个关节运
动至所需的终点位置。此移动类型将为工具提供一个曲线路径。适用于此移动
类型的共用参数包括用于进行移动计算的最大关节速度和最大关节加速度,分
别以 deg/s 和 deg/s
2
表示。如果希望机器人手臂在路点之间快速移动,而不
用考虑工具在这些路点之间的移动路径,此移动类型是个不错的选择。
• moveL 将使工具在路点之间进行线性移动。这意味着每个关节都会执行更为复
杂的移动,以使工具保持在直线路径上。适用于此移动类型的共用参数包括所
需工具速度和工具加速度(分别以 mm/s 和 m m/s
2
表示)以及特征。所选特
征将确定使用哪个特征空间表示工具位置路点。与特征空间相关的具体影响参
数包括可变特征和可变路点。如果路点的工具位置需要由机器人程序运行时可
变特征的实际值来确定,则可使用可变特征。
• moveP 将使工具以恒定速度通过圆形混合区进行线性移动,适用于黏合或配
制等一些工艺操作。默认情况下,所有路点使用相同的交融半径。值越小,路
径转角越大,反之,值越大,路径越平直。机器人手臂以恒定速度经过各路点
时,机器人控制箱不会等待 I/O 操作或操作员的操作。若存在 I/O 操作或操
作员采取行动,可能会使机器人手臂停止运动,或导致保护性停止。
圆形移动可以添加至 moveP 命令,包含两个路点:第一个路点规定圆弧上的
一个经过点,第二个路点即移动的终点。机器人将从当前位置开始做圆形移
动,然后通过两个规定的路点。工具在整个圆形移动期间的方向变化仅由起始
方向和终点方向决定,因此经过点的方向不会影响圆形移动。圆形移动前必须
始终有一个相同 MoveP 下的路点。
共享参数
“移动” 屏幕右下角的共享参数适用于机器人手臂从上一个位置移至命令下第一个路
点的路径,以及该路点到每个后续每个路点的路径。“移动” 命令设置不适用于 “移
动” 命令下从最后一个路点延伸的路径。
重新计算运动
如果要使该移动命令中的位置根据激活的 TCP 进行调整,请勾选此复选框。
TCP 选择
该 “移动” 命令下路点所用的 TCP 可通过勾选复选框选中,然后从下拉菜单中选择
TCP。每当机器人手臂移至该 “移动” 命令下的每个路点时,选中的 TCP 便被设为
激活状态。如果未勾选该复选框,激活的 TCP 便不会以任何方式修改。如果此运
动所用的激活 TCP 是在程序运行时设定的,则需要使用 “设置” 命令(参见 14.10)
或使用脚本命令进行动态设定。关于配置指定 TCP 的更多信息,请参见 13.6。
特征选择
对于 MoveL 和 MoveP,指定 “移动” 命令中的路点时可以选择使用哪个特征空间表
示路点。也就是说,设置路点时,程序将记住工具在所选特征的特征空间中的坐标
CB3 II-60 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
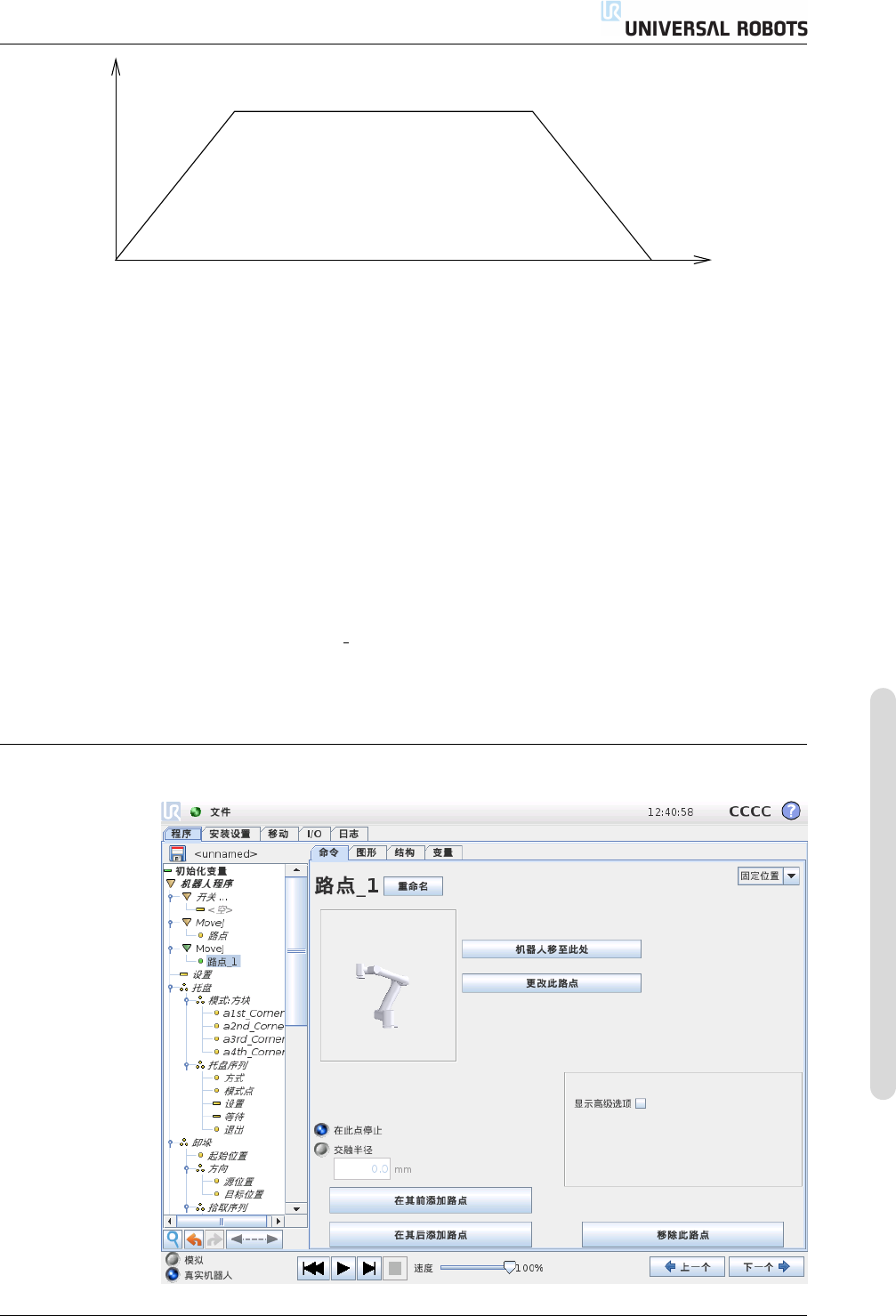
14.6 命令:固定路点
Time
Speed
Acceleration
Cruise
Deceleration
图 14.1: 运动的速度曲线。速度曲线分为三段:加速、稳速和减速。稳速阶段的速度水平由运动的速度
设置而定,加速和减速阶段的陡度则由加速参数而定。
值。以下几种情况需要详细解释:
相对路点: 所选特征对相对路点无影响。总是针对基座方向发生相对移动。
可变路点: 当机器人手臂移动到可变路点时,系统会将工具目标位置计算为所选特
征的特征空间中变量的坐标值。因此,如果选择另一特征,机器人手臂向可变
路点的移动将不同。
可变特征: 如果在当前加载的安装设置中选择的任何特征是可变特征,那么这些相
应的变量在特征选择菜单中也将是可选的。如果选择特征变量(根据特征名称
命名且后面带有 “ var”),那么机器人手臂的移动(除了移至相对路点)将取
决于程序运行时变量的实际值。特征变量的初始值是安装时配置的实际特征
值。如果该值被修改,则机器人的激动将改变。
14.6 命令:固定路点
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-61 CB3