UR5_User_Manual_zh_Global.pdf - 第137页
14.7 命令:相对路点 14.7 命令:相对路点 相对路 点系 指该路 点的 位置是 以相对 于机 器人手 臂上 一个位 置的位 置差 的方式 给出 的,例如 “ 偏左两厘米 ” 。 相对位置是根 据两个给定位置 (从左至右)之间的 差距而 定义。请注意,重复的相对位置可能会将机器人手臂移出其工作空间。 这里的距离是指两个 TCP 位置之间的笛卡尔距离。角度说明两个位置之间 TCP 方 向的变化幅度。更准确地说,是指描述方向变化的旋转…
14.6 命令:固定路点
机器人路径上的点。路点是机器人程序的核心要素,指示机器人手臂移动到哪个位
置。固定位置路点通过将机器人手臂实际移至相应位置来确定。
设置路点
按此按钮可进入 “移动” 屏幕,您可在屏幕中指定该路点对应的机器人手臂位置。
如果在 “移动” 命令屏幕中按线性移动(moveL 或 moveP)形式放置路点,则在该
“移动” 命令处需要选择一个有效的特征,方可使用此按钮。
路点名称
路点名称可以更改。名称相同的两个路点属于同一路点。路点在指定时即被编号。
交融半径
如果设置了交融半径,机器人手臂轨迹即会绕过路点从其周围经过,以使机器人手
臂不会停在该点。混合区不能重叠,因此为当前路点设置的交融半径不能与上一路
点或下一路点的交融半径重叠。停止点是指交融半径为 0.0m m 的路点。
有关 I/O 命令执行时间的说明
如果某个路点是停止点且下一个要执行的命令是 I/O 命令,则会在机器人手臂停在
此路点时执行 I/O 命令。如果该路点有交融半径,则在机器人手臂进入混合区时执
行这个 I/O 命令。
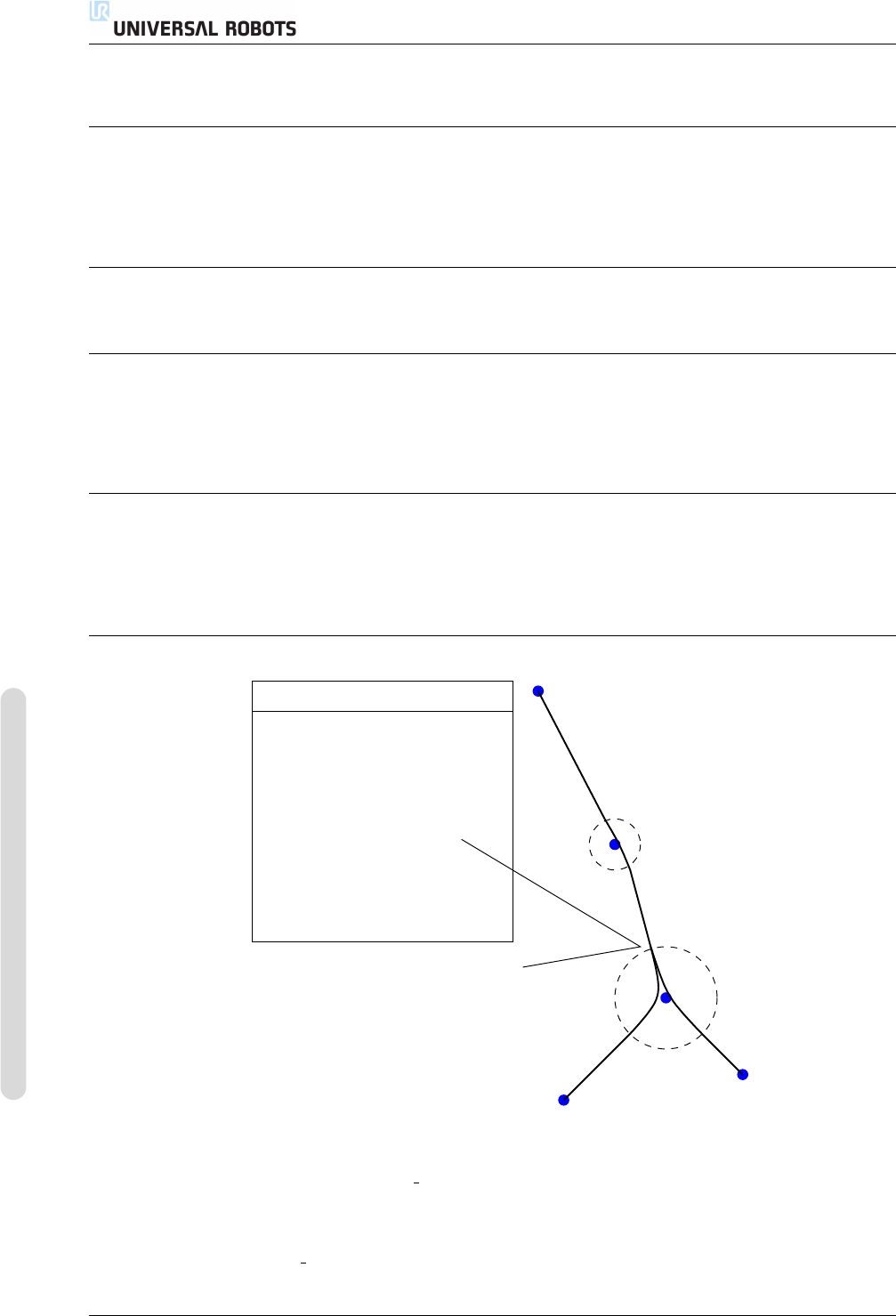
示例
Waypoint2
WaypointStart
movel
Waypoint1
if (digital_input[1]) then
else
endif
WaypointEnd1
WaypointEnd2
Program
Ending point 1
Starting point
Straight line segment
5 cm blend
Waypoint 1
Waypoint 2
10 cm blend
Ending point 2
Straight line segment
This is where the input
port is read!
上图示例中,机器人程序将工具从起始位置移至两个终点位置之一,具体移到哪
个位置取决于 digital input[1] 的状态。请注意,在交融区域(虚线圆圈)之外,工
具轨迹(粗黑线段)是以直线运动,而在混合区域以内,工具轨迹则会偏离直线
路径。另请注意,程序恰好是在机器人手臂将要进入路点 2 的混合区域时读取
digital input[1] 传感器的状态,即便程序序列中的 if...then 命令是位于路点 2 之后。
这似乎与我们的直觉判断相违,但必须选择正确的交融路径。
CB3 II-62 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
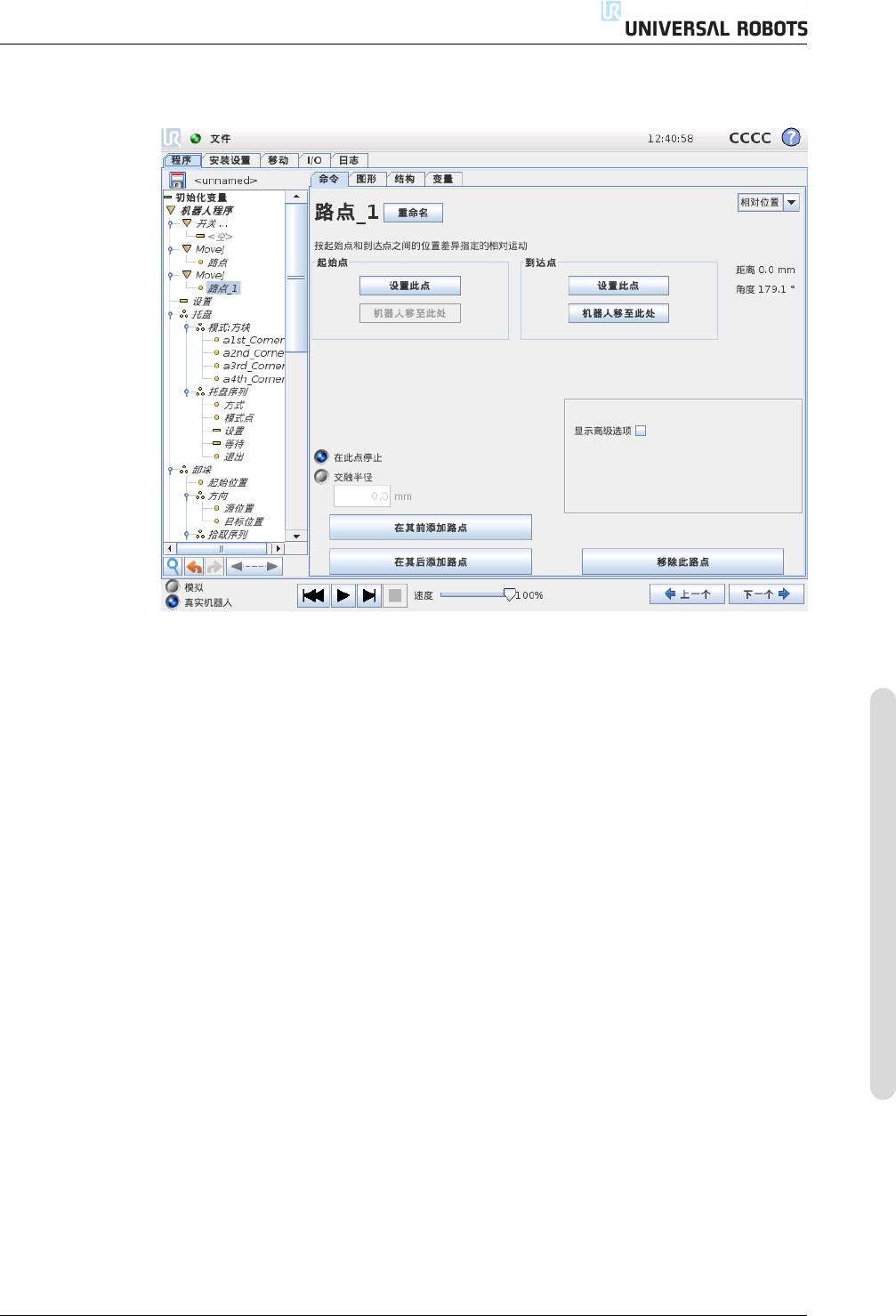
14.7 命令:相对路点
14.7 命令:相对路点
相对路点系指该路点的位置是以相对于机器人手臂上一个位置的位置差的方式给出
的,例如 “偏左两厘米”。相对位置是根据两个给定位置(从左至右)之间的差距而
定义。请注意,重复的相对位置可能会将机器人手臂移出其工作空间。
这里的距离是指两个 TCP 位置之间的笛卡尔距离。角度说明两个位置之间 TCP 方
向的变化幅度。更准确地说,是指描述方向变化的旋转矢量的长度。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-63 CB3
14.8 命令:可变路点
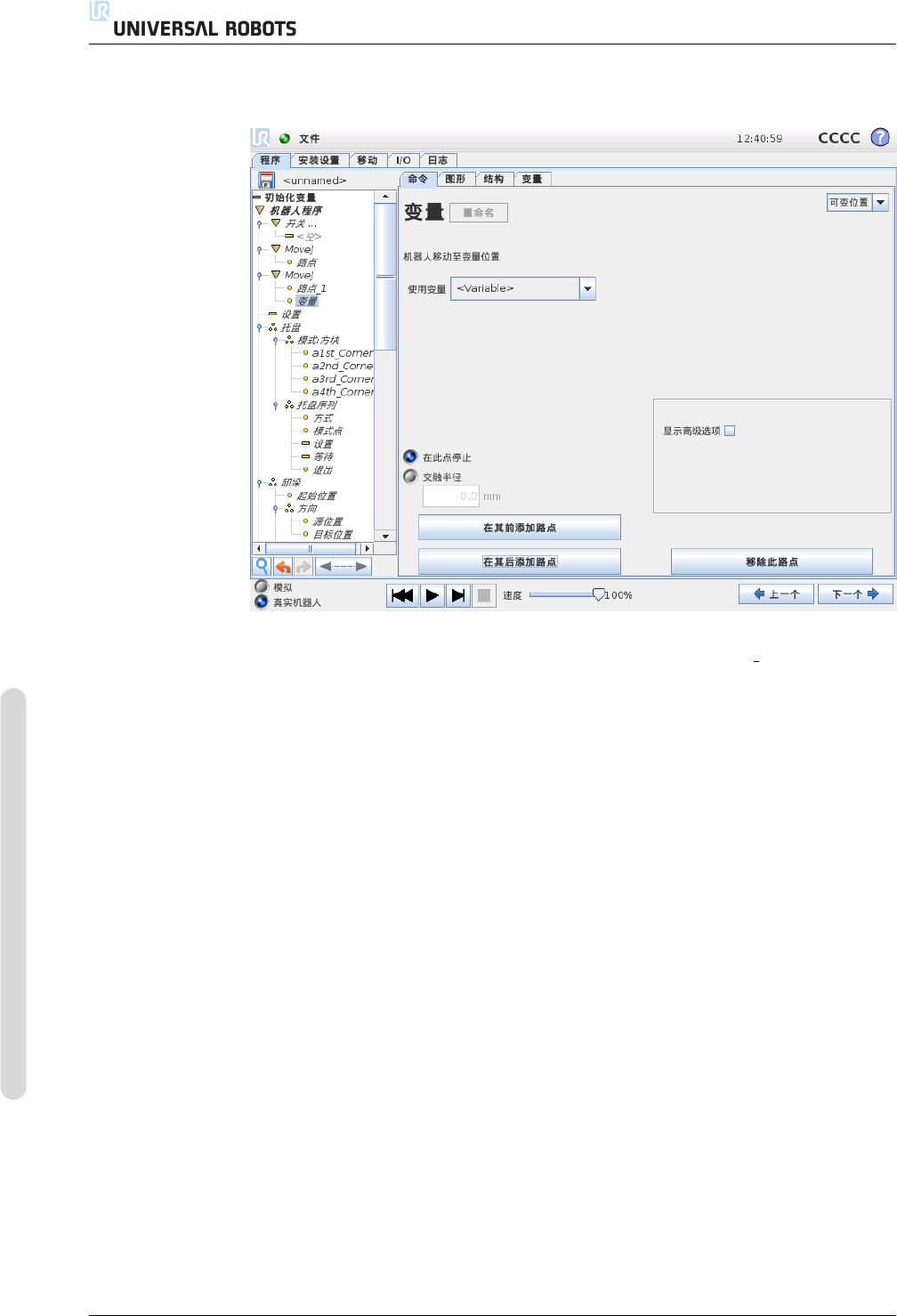
14.8 命令:可变路点
可变路点系指该路点的位置由变量给定,在此情况下,calculated pos 即为变量。变
量必须是一个位姿,例如
var=p[0.5,0.0,0.0,3.14,0.0,0.0]。前三个数字表示 x、y、z 坐标,后三个数字表示方
向,以旋转矢量表示,由矢量 rx、ry、rz 给定。轴长是指要旋转的角度,以弧度表
示,矢量本身给定了要绕之旋转的轴。位置始终是相对于参考框架或坐标系给定的,
由所选特征定义。机器人手臂始终以线性方式移至可变路点。
例如,将机器人沿着工具的 z 轴移动 20mm:
var_1=p[0,0,0.02,0,0,0]
Movel
路点 _1 (可变位置):
使用变量 =var_1, 特征 = 工具
CB3 II-64 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。