UR5_User_Manual_zh_Global.pdf - 第140页
14.11 命令:弹出窗口 也可用 于设 置机 器人手 臂的 有效负 载,例 如设置 通过 此动作 抓取 的工 件的重 量。如 果工具 处承 受的 重量与 预期 重量不 同,可 能需要 调整 重量,以 避免 触发机 器人 意外 保护性停止。 激活的 TCP 也可以使用 “ 设置 ” 命令修改。只需勾选复选框,并从菜单中选择一个 TCP 偏移。如果在写入程序时为特定运动指定的激活 TCP 已知,那么请在 “ 移动 ” 卡 上 使 用 该 …
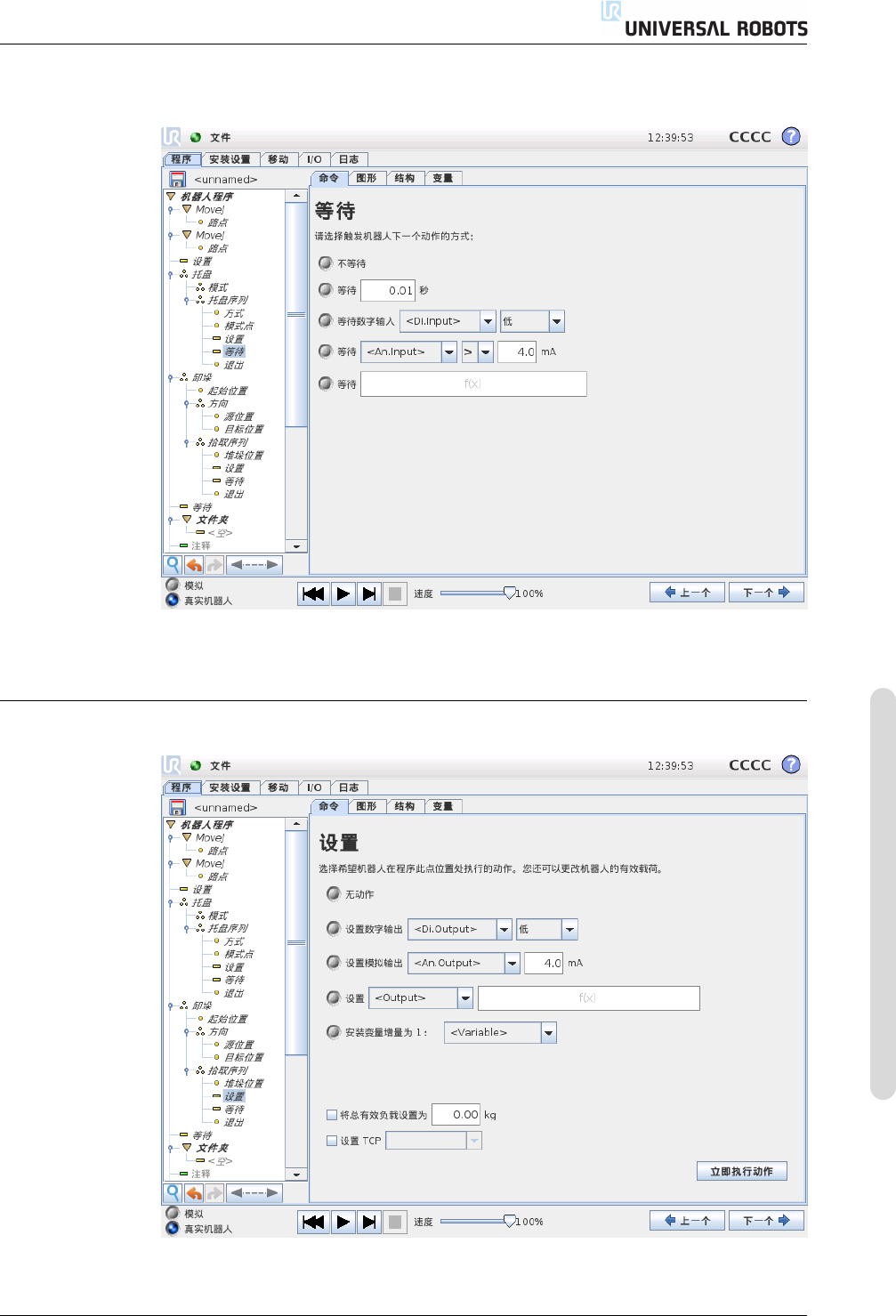
14.9 命令:等待
14.9 命令:等待
“等待” 指定的时间或等待 I/O 信号。
14.10 命令:设置
将数字输出或模拟输出设置为给定值。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-65 CB3
14.11 命令:弹出窗口
也可用于设置机器人手臂的有效负载,例如设置通过此动作抓取的工件的重量。如
果工具处承受的重量与预期重量不同,可能需要调整重量,以避免触发机器人意外
保护性停止。
激活的 TCP 也可以使用 “设置” 命令修改。只需勾选复选框,并从菜单中选择一个
TCP 偏移。如果在写入程序时为特定运动指定的激活 TCP 已知,那么请在 “移动”
卡上使用该 TCP 选择(请参见 14.5)。关于配置指定 TCP 的更多信息,请参见
13.6。
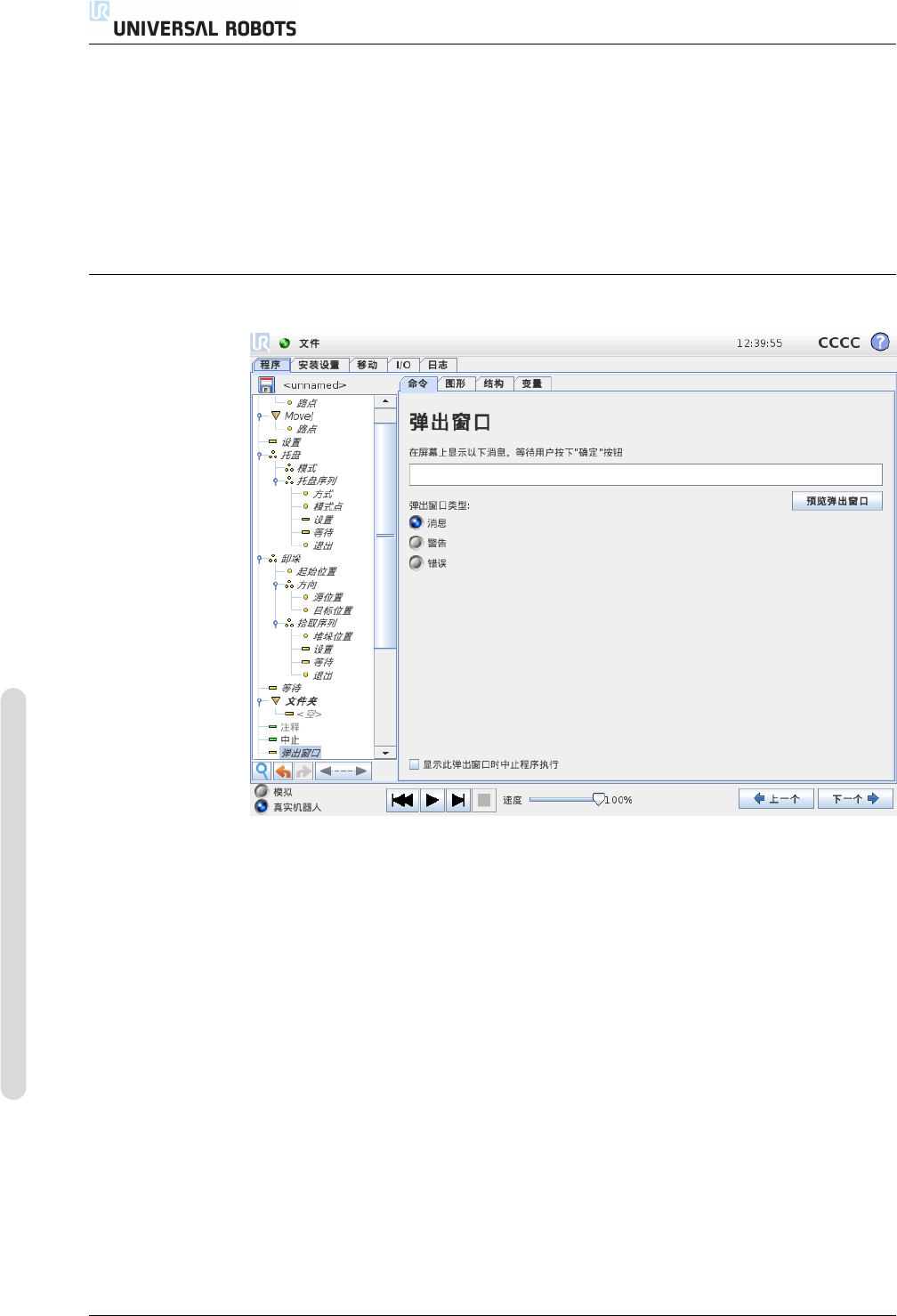
14.11 命令:弹出窗口
利用 “弹出窗口” 命令可指定一则消息,程序运行至此命令时在屏幕上显示该消息。
您可以选择消息的样式,通过屏幕键盘可输入消息文本。显示弹出窗口后,机器人
将等待用户/操作员按下窗口中的 “确定” 按钮,然后才继续运行程序。如果选中
“中止程序执行”,机器人程序将在弹出此消息窗口时中止运行。
CB3 II-66 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
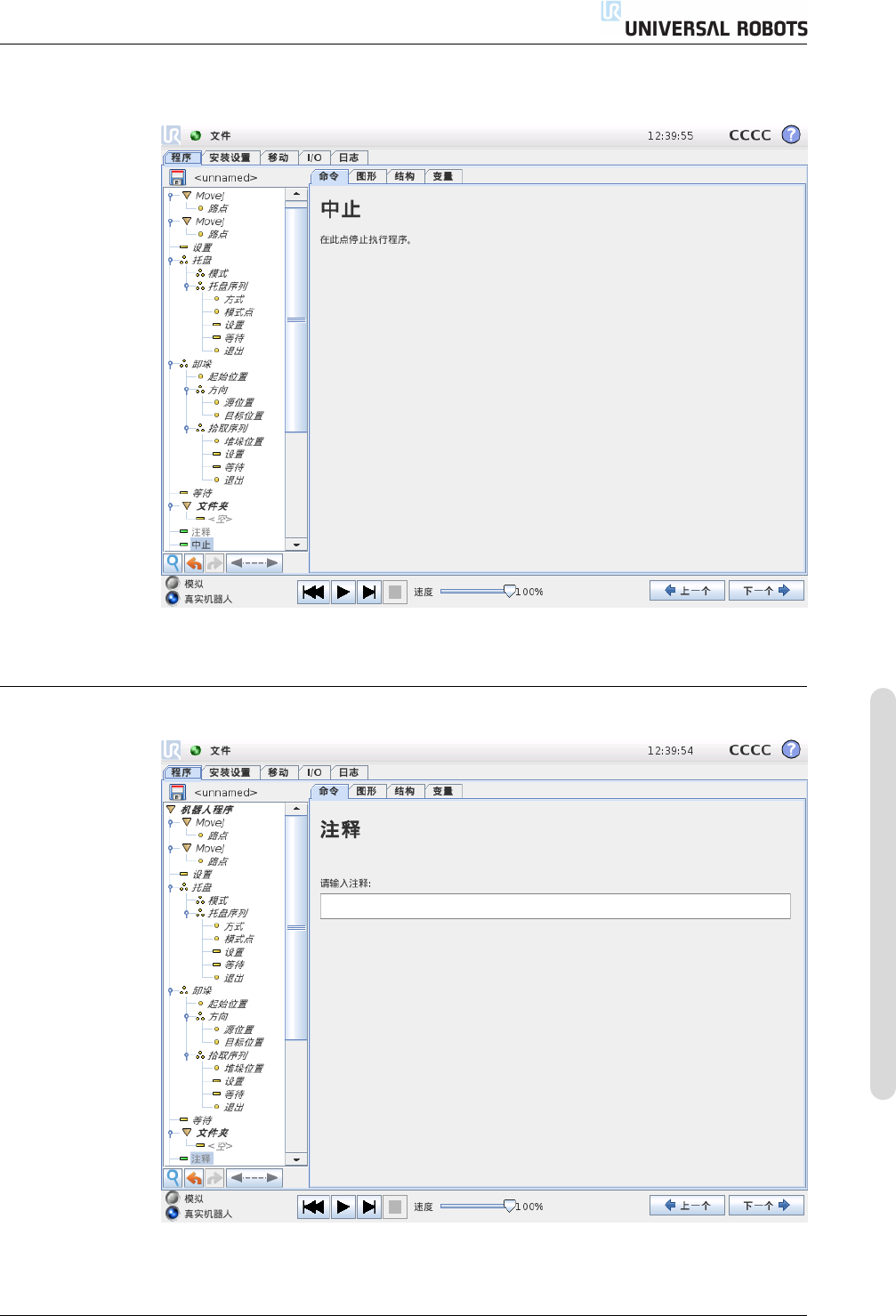
14.12 命令:中止
14.12 命令:中止
程序将在该点停止运行。
14.13 命令:注释
此命令允许编程员向程序添加一行文本。程序运行期间,此行文本不会执行任何操
作。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-67 CB3