UR5_User_Manual_zh_Global.pdf - 第145页
14.18 命令: If 为变量 赋值。 通过赋 值可 将右 侧的计 算值 赋给左 侧的 变量。此 命令 在复 杂程序 中很 实用。 14.18 命令: If “if...else” 结构可以指示 机器人根据传 感器输入或变 量值来改变其 行为。使用表达 式 编辑器可描 述指定机器人 继续执行此 If 命令 的子命令的条 件。如果条件 为 真 ,则将 执行此 If 命令内部的命令行。 每个 If 命令 可以 包含 多个 ElseIf 和…
14.17 命令:赋值
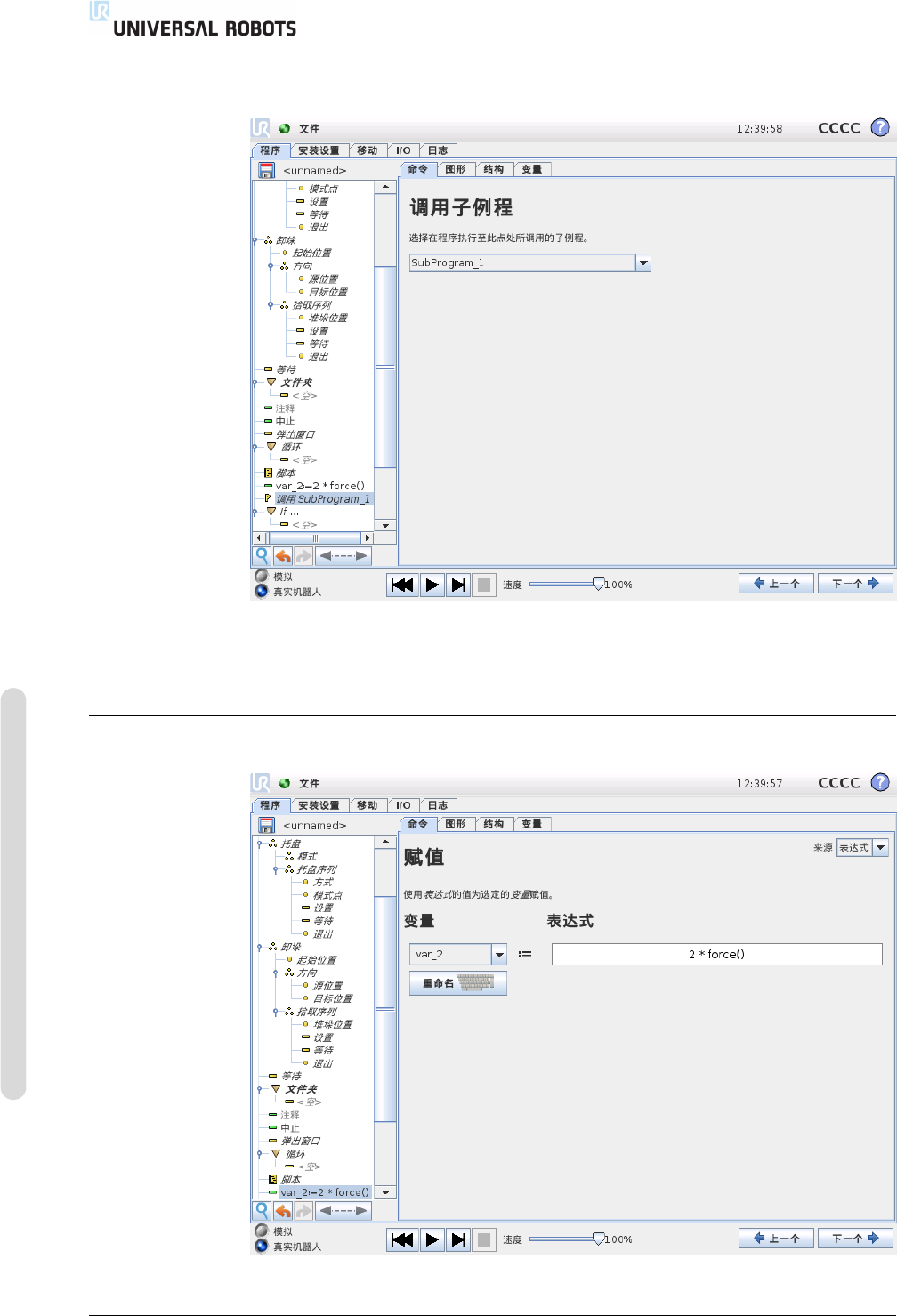
命令:调用 SubProgram
调用子程序时将运行子程序中的程序行,运行完子程序中的程序行后再返回到程序
的下一行继续运行。
14.17 命令:赋值
CB3 II-70 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
14.18 命令:If
为变量赋值。通过赋值可将右侧的计算值赋给左侧的变量。此命令在复杂程序中很
实用。
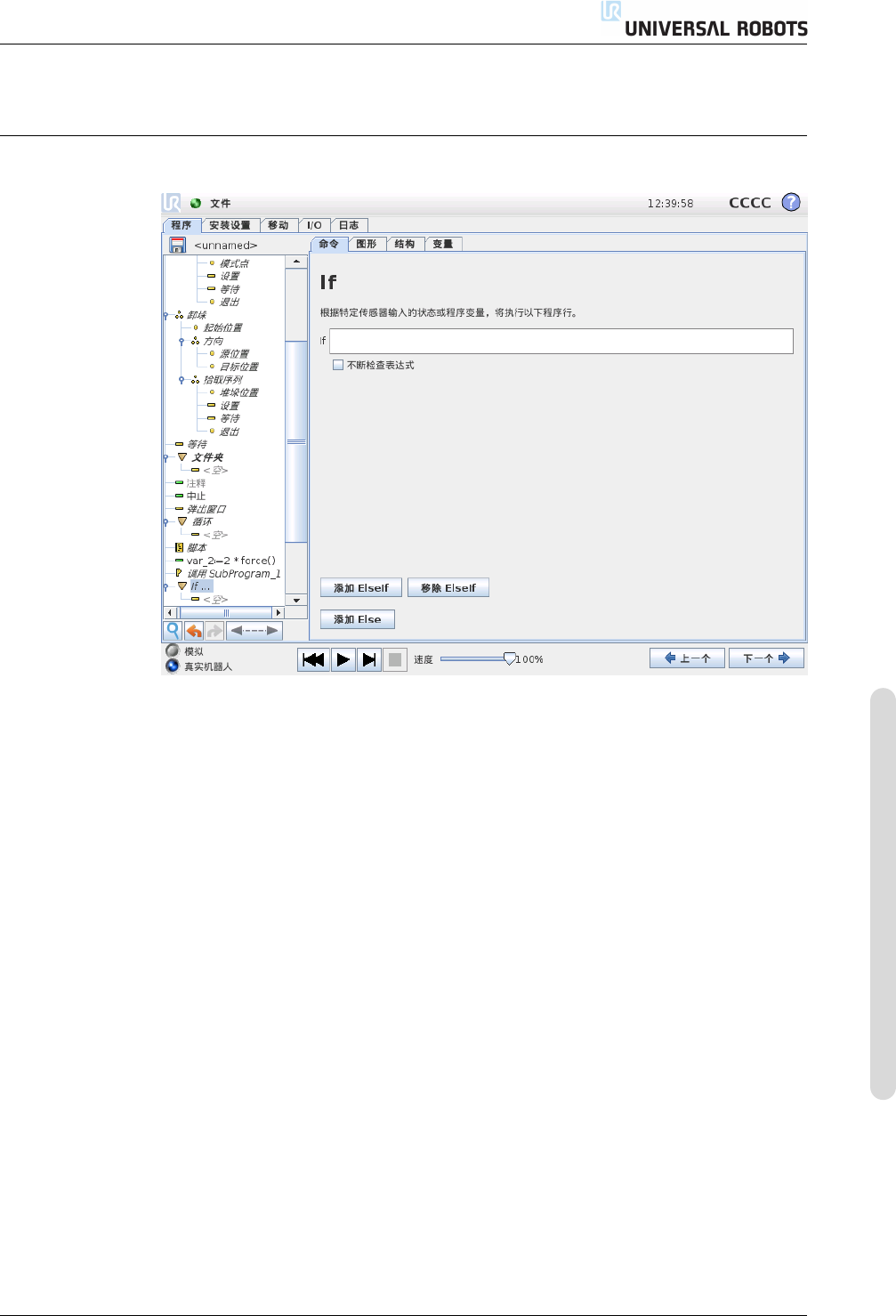
14.18 命令:If
“if...else” 结构可以指示机器人根据传感器输入或变量值来改变其行为。使用表达式
编辑器可描述指定机器人继续执行此 If 命令的子命令的条件。如果条件为真,则将
执行此 If 命令内部的命令行。
每个 If 命令可以包含多个 ElseIf 和一个 Else 命令。可以使用屏幕上的按钮添加这
些命令。ElseIf 命令可从该命令屏幕上删除。
开启不断检查表达式选项后,将在执行所含的命令行时,判断 If 和 ElseIf 语句的条
件。如果在 If 部分执行过程中,表达式判断结果为 False(假),那么将转至运行后
面的 ElseIf 或 Else 语句。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-71 CB3
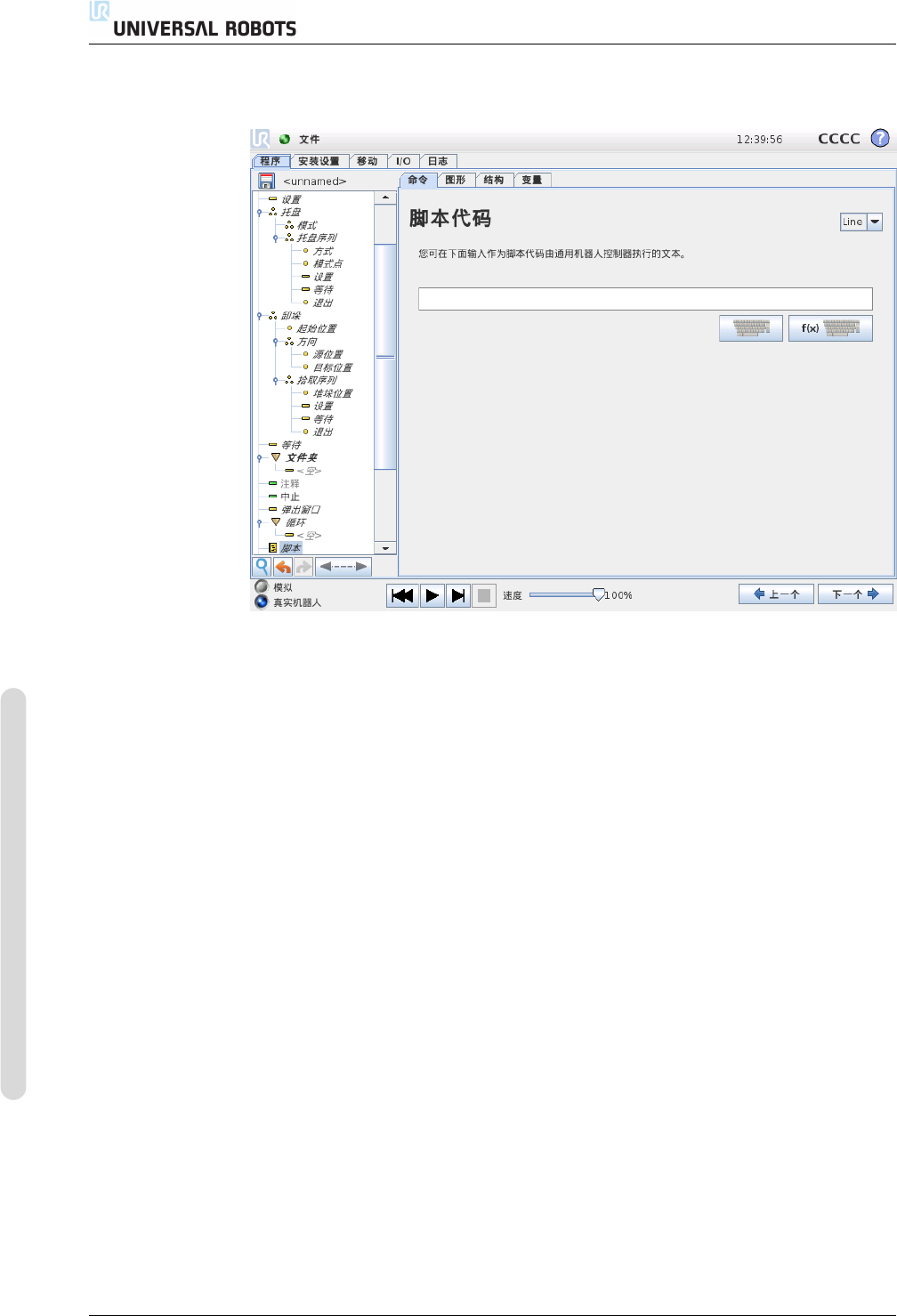
14.19 命令:脚本
14.19 命令:脚本
使用此命令可访问由机器人控制器执行的底层实时脚本语言。这是专门针对高
级用户的,使用指南可以在支持网站上的脚本手册中中找到。(http://support.
universal-robots.com/) 注意,只有 UR 分销商和 OEM 客户能够访问该网站。
如果在右上角选中 “文件” 选项,可以创建和编辑脚本程序文件。通过此方式,可
以将长而复杂的脚本程序与 PolyScope 软件提供的界面友好的操作员编程功能配合
使用。
CB3 II-72 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。