UR5_User_Manual_zh_Global.pdf - 第152页
14.24 命令:力 的去 毛刺 作业, 此时 需要一 个垂 直于 TCP 运 动的 力。请 注意,当 机器 人手 臂 不再 移动 时:如果 在机 器人 手臂 站立 不动 时进入 力模 式,在 TCP 速度 高于 零 之前将没 有柔性轴。如 果随后依 然是在力 模式下机器 人手臂再 次站立不 动,任 务框架的方向与上一次 TCP 速度大于零时的方向相同。 对于后 三种 类型,当 机器 人正 在力模 式下 工作时, 实际 任务框 架可 在…
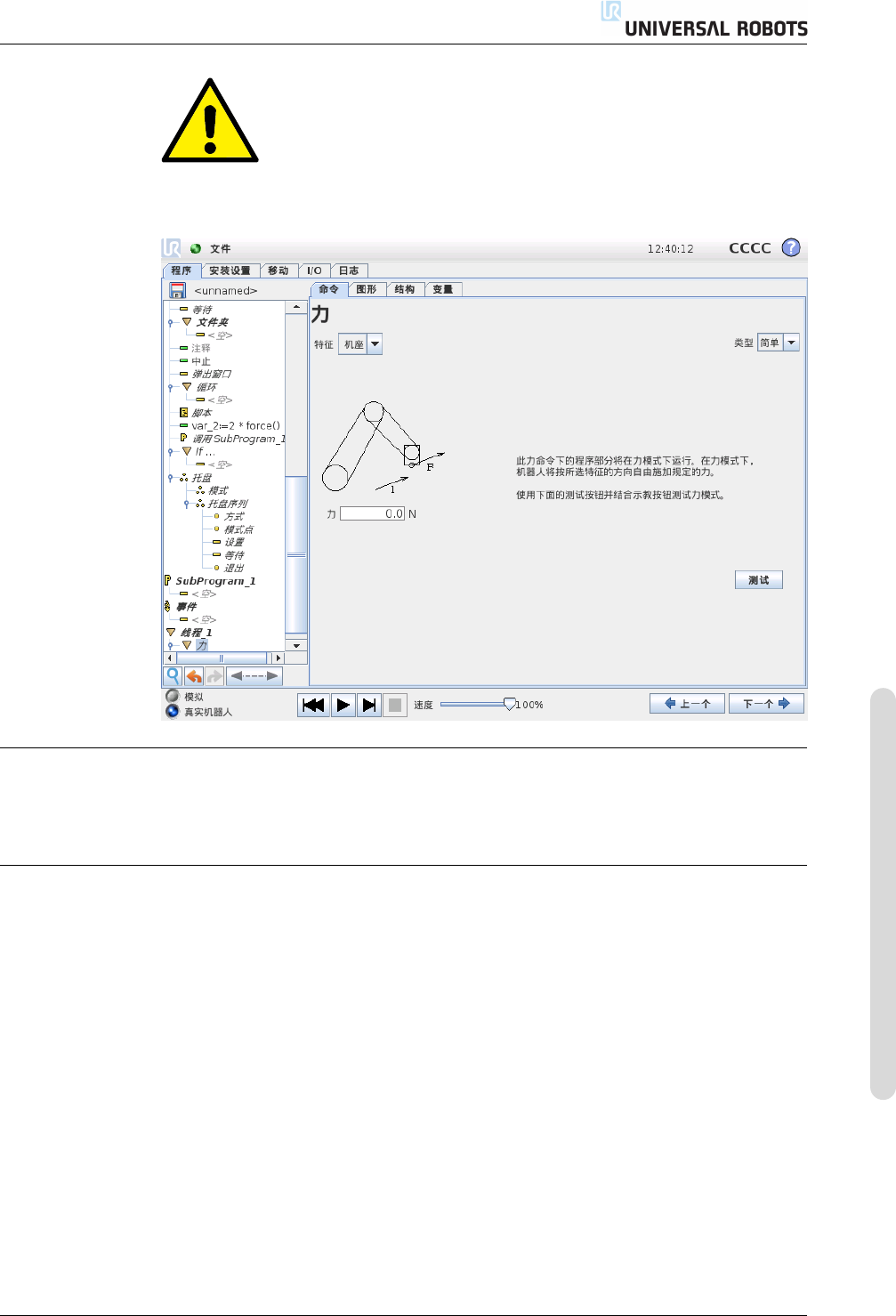
14.24 命令:力
警告:
如果力功能没有正确使用,会产生超过 150N 的力。风险评估时应
将设定的力考虑在内。
特征选择
“特征” 菜单用于选择机器人在力模式下工作时将使用的坐标系(轴)。菜单中的特
征为安装时所定义的特征,请参阅 13.12。
力模式类型
力模式有四种不同的类型,每种类型定义一种对所选特征的理解方式。
• 简单:在力模式下将只有一个柔性轴。沿着该轴的力可以调节。所需的力将始
终沿着所选特征的 z 轴施加。但是,对于 “直线” 特征,会沿着他们的 y 轴施
加力。
• 框架:框架类型可实现更高级的应用。在这里,所有六个自由度的柔顺性和力
都可以单独选择。
• 点:选择了 “点” 时,任务框架会让 y 轴从机器人 TCP 指向所选特征的起点。
机器人 TCP 与所选特征的起点之间的距离必须至少为 10 mm。请注意,运行
过程中任务框架将随着机器人 TCP 位置的变化而变化。任务框架的 x 轴和 z
轴取决于所选特征的原始方向。
• 运动:“运动” 表示任务框架将随 TCP 运动方向而变化。任务框架的 x 轴将是
TCP 移动方向投射到所选特征的 x 轴和 y 轴所决定平面上的投影。y 轴将垂
直于机器人手臂运动,并在所选特征的 x-y 平面内。此类型适用于沿复杂路径
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-77 CB3
14.24 命令:力
的去毛刺作业,此时需要一个垂直于 TCP 运动的力。请注意,当机器人手臂
不再移动时:如果在机器人手臂站立不动时进入力模式,在 TCP 速度高于零
之前将没有柔性轴。如果随后依然是在力模式下机器人手臂再次站立不动,任
务框架的方向与上一次 TCP 速度大于零时的方向相同。
对于后三种类型,当机器人正在力模式下工作时,实际任务框架可在运行时在图形
选项卡 (14.29) 上查看。
力值选择
力既可以为柔性轴设置也可以为非柔性轴设置,但效果不同。
• 柔性:机器人手臂将调节自身位置以达到所选的力。
• 非柔性:机器人手臂将遵循程序设置的自身轨迹,同时达到在此设置的外力
值。
对于平移参数,力的单位为牛顿 [N],对于旋转参数,扭矩单位为牛顿米 [Nm]。
限制选择
针对所有轴都可以设置一个限制,但是这些限制对于柔性轴和非柔性轴有不同的意
义。
• 柔性:限制为允许 TCP 沿/绕轴达到的最大速度。单位为 [mm/s] 和 [度/s]。
• 非柔性:限制为在安全停机之前允许机器人从程序轨迹的最大偏离。单位为
[mm] 和 [度]。
测试力设置
标有 “测试” 的开关按钮可将示教盒背面 “自由驱动” 按钮的行为从正常自由驱动模
式切换到测试力命令。
当 “测试” 按钮开启、示教盒背面的 “自由驱动” 按钮按下时,机器人将仿照程序已
达到此力命令的情况来进行工作。通过这一方法,可在实际运行完整程序之前验证
各项设置。这一可能性对验证柔性轴和力是否选择正确尤其有用。只需要用一只手
握住机器人 TCP,另一只手按 “自由驱动” 按钮,并注意机器人手臂能够/不能够
移动的方向。离开此屏幕时,“测试” 按钮会自动关闭,这意味着示教盒背面的 “自
由驱动” 按钮再次用于正常自由驱动模式。注意:仅当为 “力” 命令选择了有效的特
征时,“自由驱动” 按钮才有效。
CB3 II-78 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
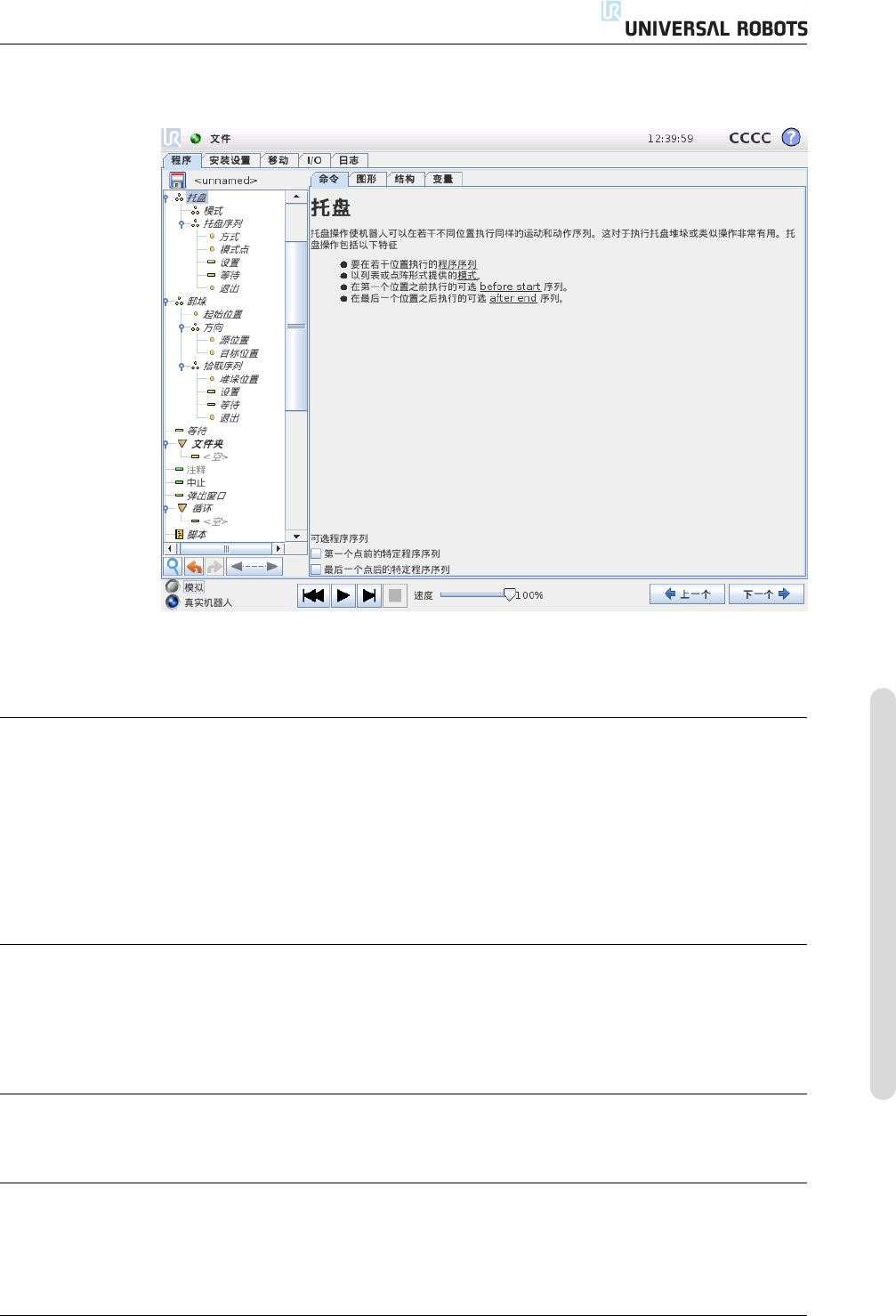
14.25 命令:托盘
14.25 命令:托盘
托盘操作可以在以模式形式给定的一组位置(如 14.23所述)执行运动序列。在模
式中的每个位置处,将相对于此模式位置执行运动序列。
编写托盘操作程序
编程步骤如下:
1. 定义模式。
2. 确定用于在每个点拾取/放置工件的 “托盘序列”。序列描述在每个模式位置应
完成的操作。
3. 使用序列命令屏幕上的选择器定义序列中应与模式位置相对应的路点。
托盘序列/锚式序列
在 “托盘序列” 节点中,机器人手臂相对于托盘位置而运动。使机器人手臂处于由模
式在锚点位置/模式点处指定的位置。为满足这一原则,将相应移动所有剩余位置。
勿在序列中使用移动命令,因为该命令的运动不是相对于锚点位置。
“BeforeStart”
可选的 BeforeStart 序列只在操作开始之前运行。这可用于等待信号就绪。
“AfterEnd”
可选的 AfterEnd 序列在操作完成后运行。这可用于向输送机发送开始运动信号,
以为下一托盘做好准备。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-79 CB3