UR5_User_Manual_zh_Global.pdf - 第154页
14.26 命令:探寻 14.26 命令:探寻 探寻命 令使 用传感 器确 定机器 人工 具何时 抵达 可以抓 取或 放下工 件的 正确位 置。传 感器可 以是 按钮 开关、压 力传 感器或 电容 传感器。 此功 能适用 于处 理厚度 不一 的工 件堆垛或工件的精确位置无从知晓或难以编程的情况。 码垛 卸垛 编写用于处理堆垛探寻操作程序时, 必须定义 s (起始点) 、 d (堆垛方向) 和 i (堆 垛中的工件厚度) 。 而在此 之前…
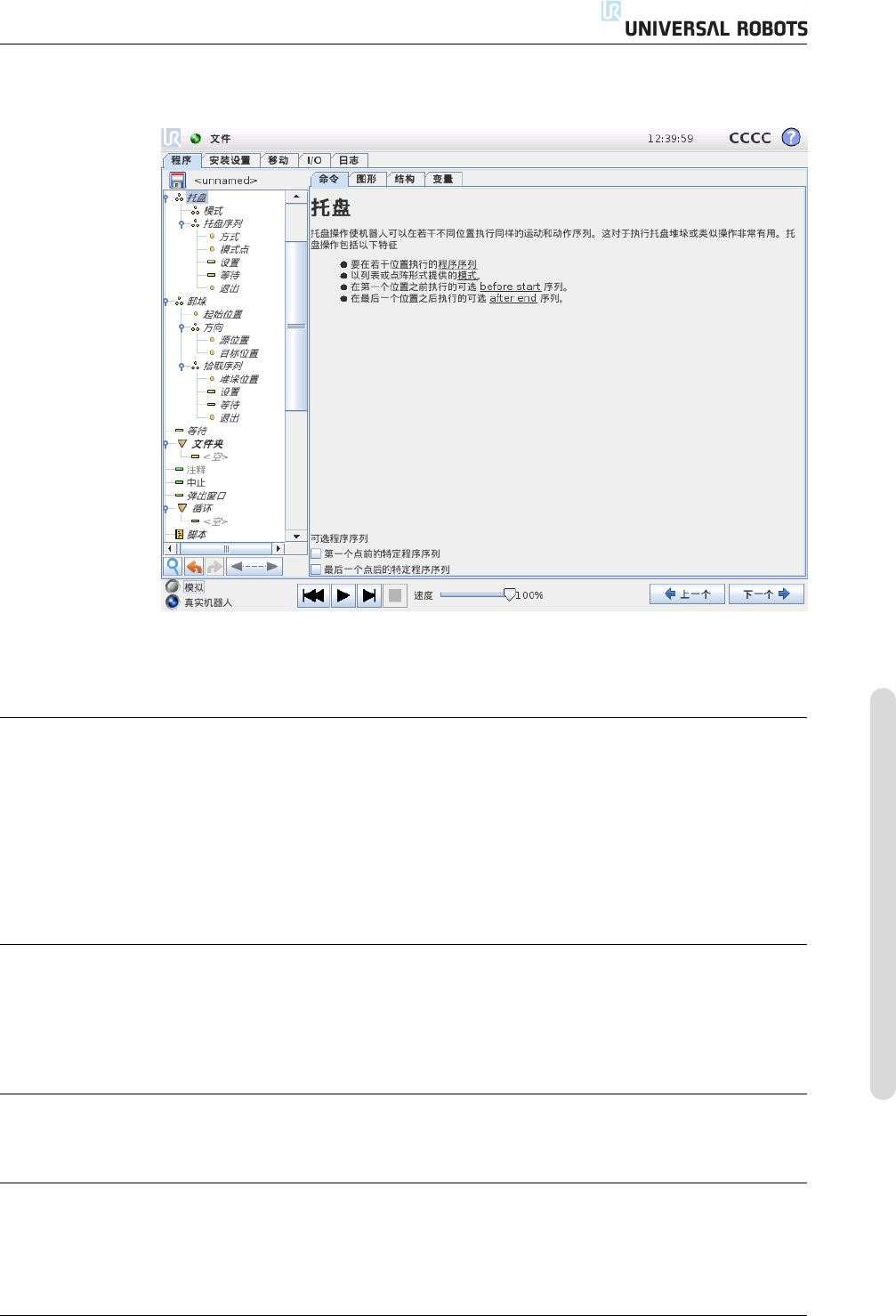
14.25 命令:托盘
14.25 命令:托盘
托盘操作可以在以模式形式给定的一组位置(如 14.23所述)执行运动序列。在模
式中的每个位置处,将相对于此模式位置执行运动序列。
编写托盘操作程序
编程步骤如下:
1. 定义模式。
2. 确定用于在每个点拾取/放置工件的 “托盘序列”。序列描述在每个模式位置应
完成的操作。
3. 使用序列命令屏幕上的选择器定义序列中应与模式位置相对应的路点。
托盘序列/锚式序列
在 “托盘序列” 节点中,机器人手臂相对于托盘位置而运动。使机器人手臂处于由模
式在锚点位置/模式点处指定的位置。为满足这一原则,将相应移动所有剩余位置。
勿在序列中使用移动命令,因为该命令的运动不是相对于锚点位置。
“BeforeStart”
可选的 BeforeStart 序列只在操作开始之前运行。这可用于等待信号就绪。
“AfterEnd”
可选的 AfterEnd 序列在操作完成后运行。这可用于向输送机发送开始运动信号,
以为下一托盘做好准备。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-79 CB3
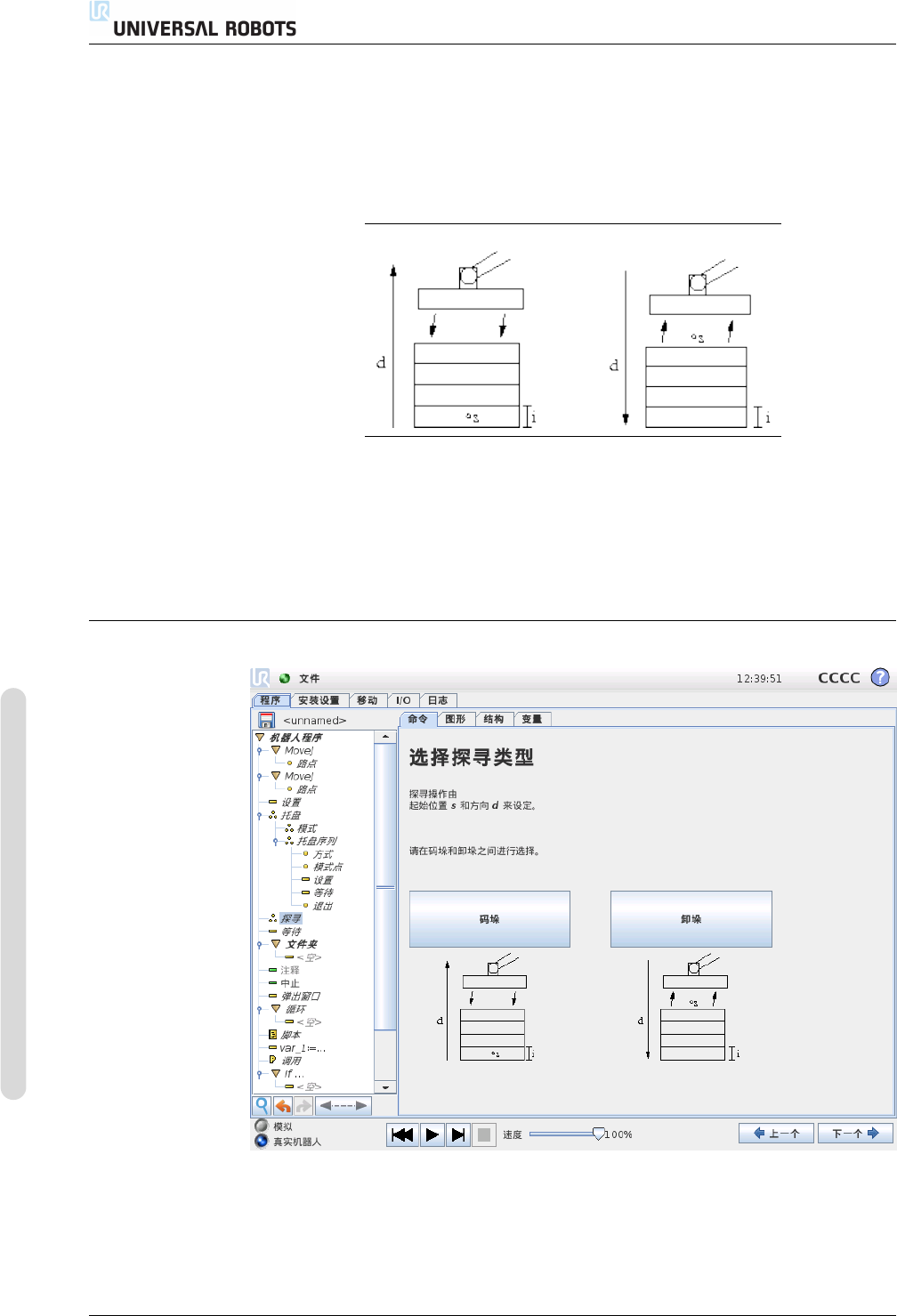
14.26 命令:探寻
14.26 命令:探寻
探寻命令使用传感器确定机器人工具何时抵达可以抓取或放下工件的正确位置。传
感器可以是按钮开关、压力传感器或电容传感器。此功能适用于处理厚度不一的工
件堆垛或工件的精确位置无从知晓或难以编程的情况。
码垛 卸垛
编写用于处理堆垛探寻操作程序时,必须定义 s(起始点)、 d(堆垛方向)和 i(堆
垛中的工件厚度)。
而在此之前,首先必须定义用于确定何时到达下一个堆垛位置的条件以及在每个堆
垛位置将要执行的特定程序序列。此外,还必须给出堆垛操作中所涉及的运动的速
度和加速度。
码垛
码垛时,机器人手臂将移至起始位置,然后反向移动以搜索下一个堆垛位置。找到
下一个堆垛位置时,机器人将记住此位置并执行特定序列。在下一轮,机器人将从
所记住的位置开始以工件厚度为增量沿着码垛方向搜索。当码垛高度超出所定义的
数值时,或者传感器发送信号时,码垛操作即告完成。
CB3 II-80 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
14.26 命令:探寻
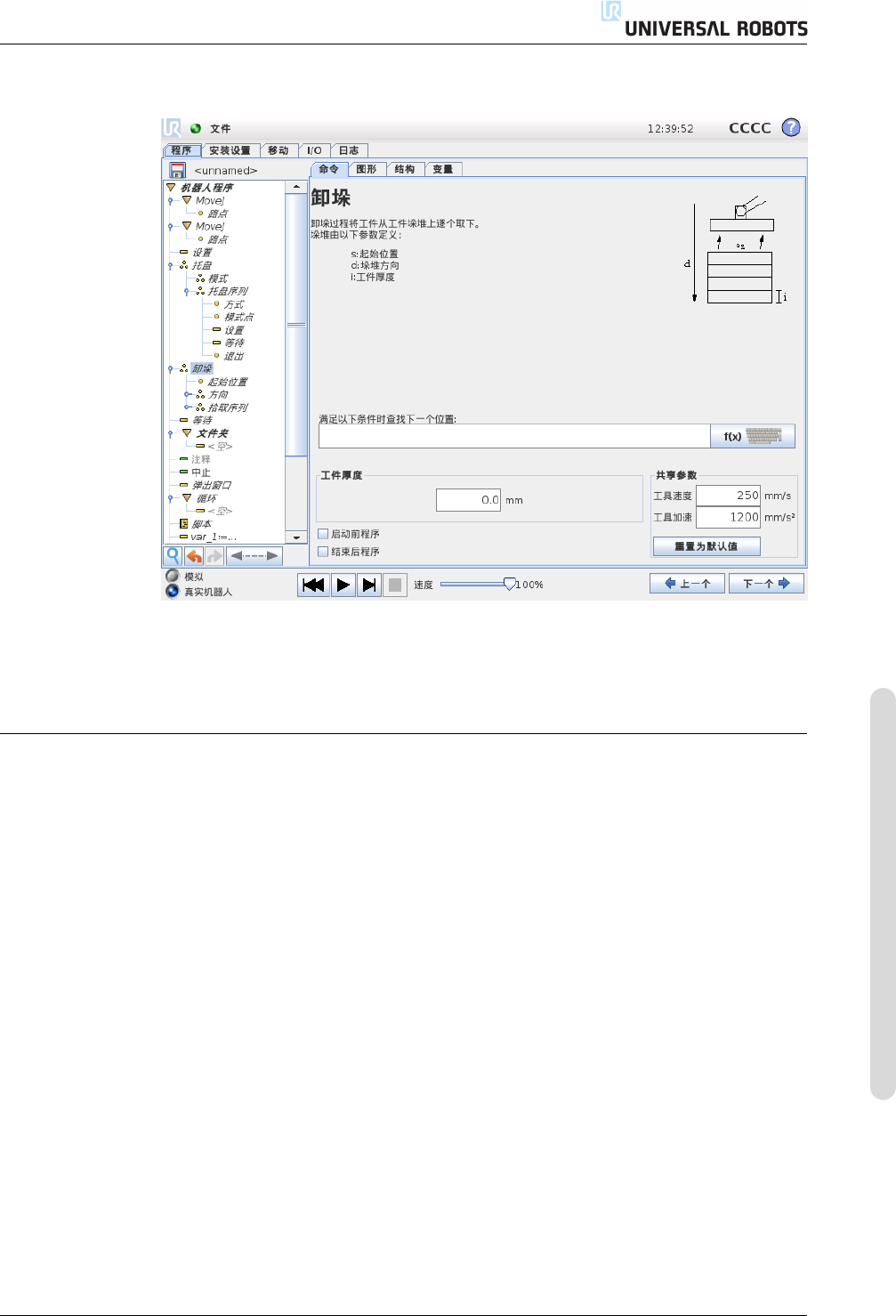
卸垛
卸垛时,机器人手臂从起始位置沿着指定方向移动,搜索下一工件。屏幕上的条件
决定何时到达下一工件。当条件满足时,机器人将记住此位置并执行特定序列。在
下一轮,机器人将从所记住的位置开始以工件厚度为增量沿着卸垛方向搜索。
起始位置
起始位置是指开始执行堆垛操作的位置。如果忘记定义起始位置,堆垛操作将从机
器人手臂当前位置开始。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-81 CB3