UR5_User_Manual_zh_Global.pdf - 第161页
. . 15 设置屏幕 • 初始化机器人 转至初始化屏幕,请参见 11.5 。 • 语言和单位 配置用户界面使用的语言和测量单位,请参见 15.1 。 • 更新机器人 将机器人软件升级到新版本,请参见 15.2 。 • 设置密 码 提供相应 机制来锁定 机器人的 编程部分,以 避免无密 码的人员执 行修 改操作,请参见 15.3 。 • 校准屏幕 校准触摸屏的 “ 触摸 ” 功能,请参见 15.4 。 • 设置网络 打开用于设置机器人控…
14.32 命令:变量初始化
此屏幕允许在程序(和任何线程)开始执行之前设置变量值。
可从变量列表中单击相应的变量来选择变量,也可以使用变量选择器框选择变量。
对于所选变量,可以输入一个表达式,程序开始执行时将使用此表达式设置变量
值。
如果选中 “希望保留最后的运行值” 复选框,则变量将被初始化为变量选项卡上所显
示的值(如 14.31所述)。这允许变量保留使用其上次程序执行期间的值。如果程序
是首次运行,或者变量值选项卡已清空,则变量将从表达式获取变量值。
将变量名称设置为空(仅输入空格)即可将其从程序中删除。
CB3 II-86 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
.
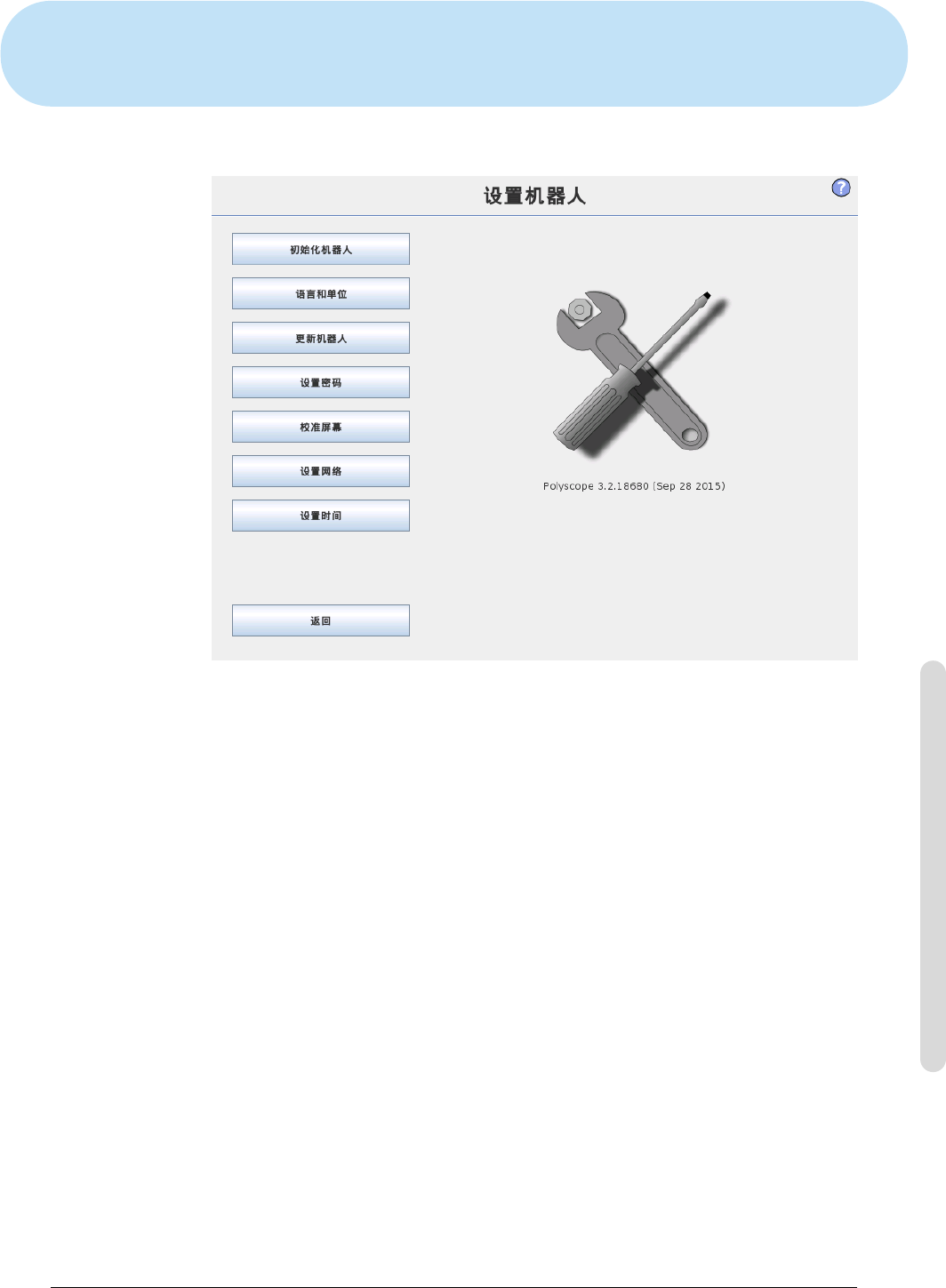
.15 设置屏幕
• 初始化机器人转至初始化屏幕,请参见 11.5 。
• 语言和单位配置用户界面使用的语言和测量单位,请参见 15.1 。
• 更新机器人将机器人软件升级到新版本,请参见 15.2 。
• 设置密码提供相应机制来锁定机器人的编程部分,以避免无密码的人员执行修
改操作,请参见 15.3 。
• 校准屏幕校准触摸屏的 “触摸” 功能,请参见 15.4。
• 设置网络打开用于设置机器人控制箱以太网的界面,请参见 15.5 。
• 设置时间设置系统的时间和日期并配置时钟显示格式,请参见 15.6。
• 返回返回欢迎屏幕。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-87 CB3
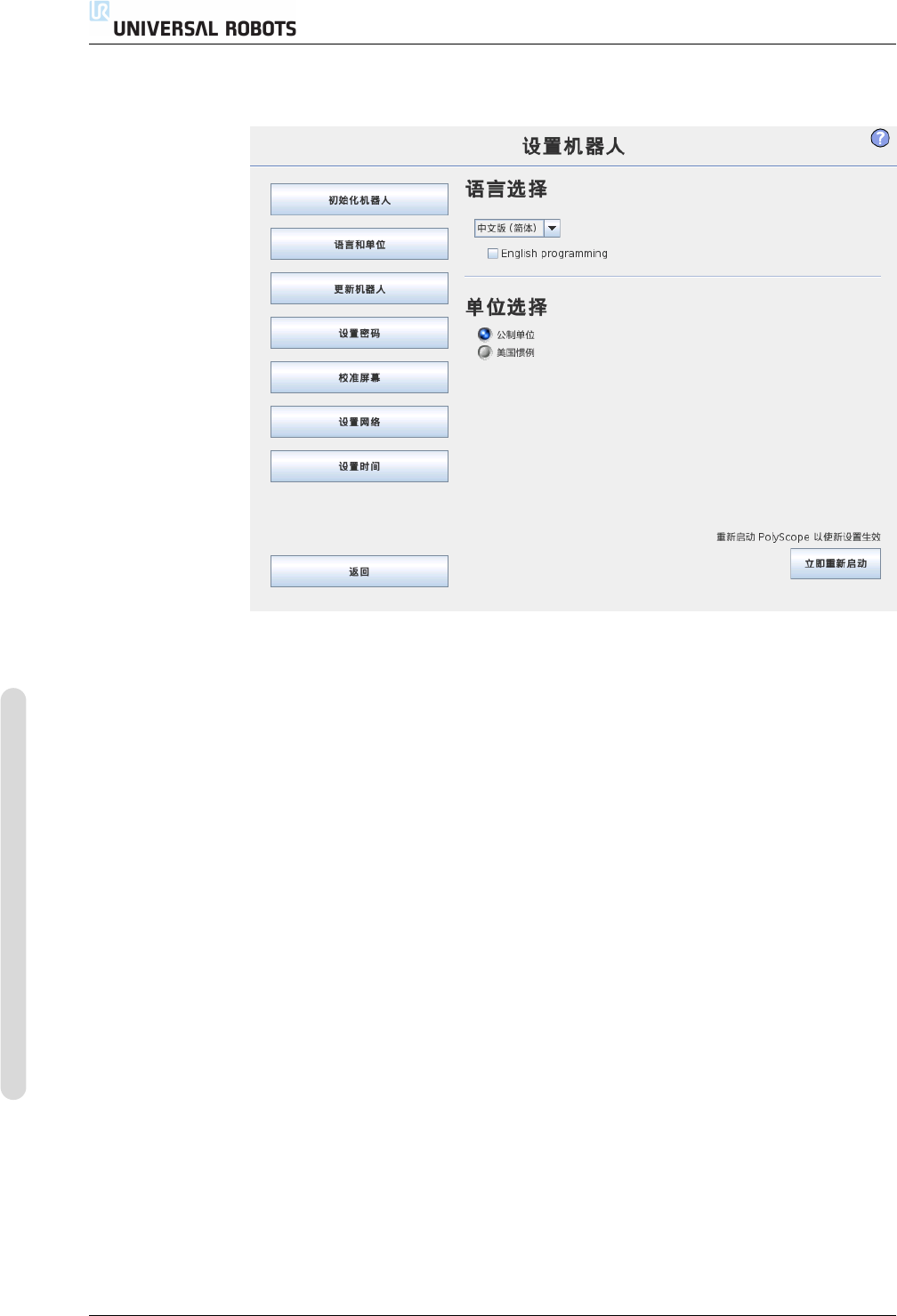
15.1 语言和单位
15.1 语言和单位
PolyScope 中使用的语言和单位可以在该屏幕设定。PolyScope 上不同屏幕显示的
文本都将以选定的语言显示,内嵌的帮助文件也将以选定的语言显示。勾选 “英文
编程”,以英文显示机器人程序内的命令名称。PolyScope 必须重新启动,所做更改
方可生效。
CB3 II-88 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。